Journal of Jilin University(Engineering and Technology Edition) ›› 2022, Vol. 52 ›› Issue (8): 1918-1925.doi: 10.13229/j.cnki.jdxbgxb20220263
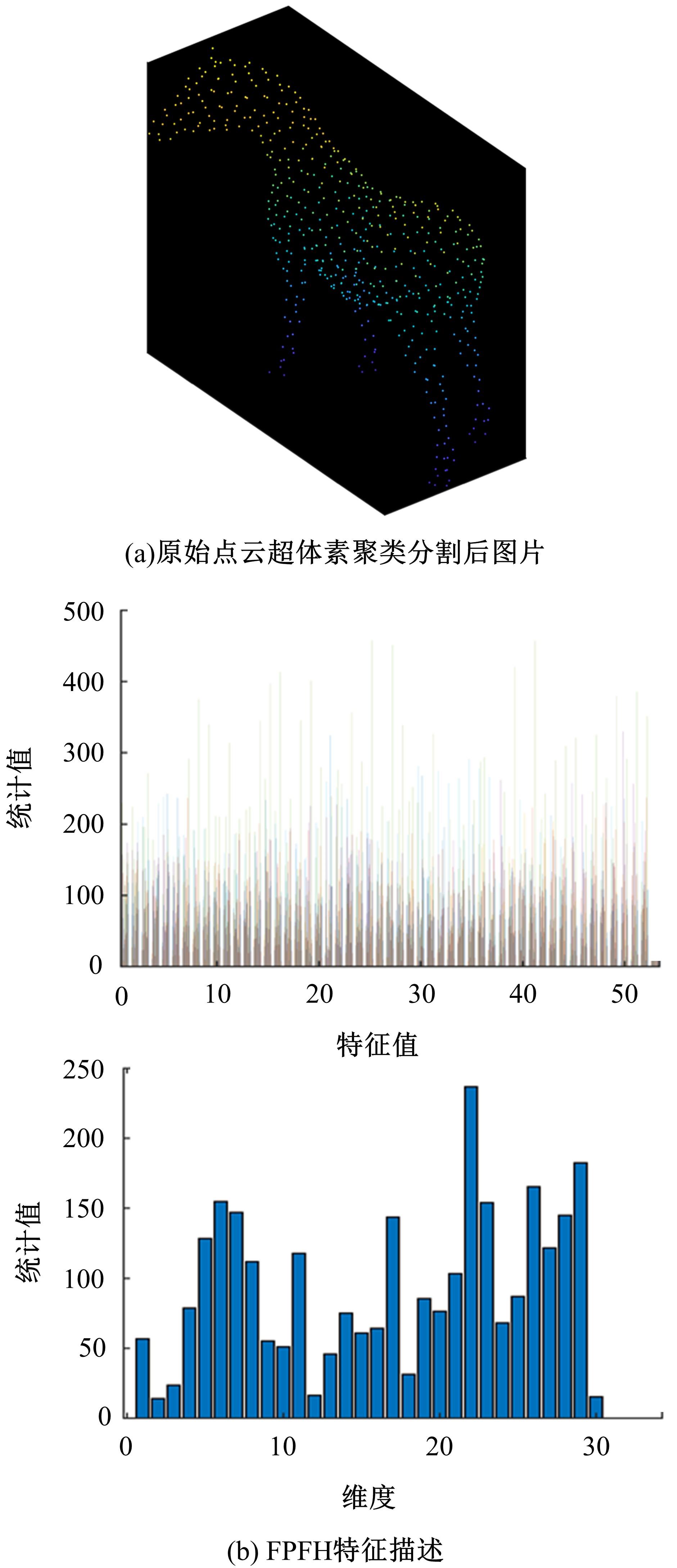
Point cloud registration method based on supervoxel bidirectional nearest neighbor distance ratio
Xue-mei LI1,2( ),Chun-yang WANG1,3(),Xue-lian LIU3,Chun-hao SHI1,Guo-rui LI1
),Chun-yang WANG1,3(),Xue-lian LIU3,Chun-hao SHI1,Guo-rui LI1
- 1.School of Electronic and Information Engineering,Changchun University of Science and Technology,Changchun 130022,China
2.School of Mechanical and Control Engineering,Baicheng Normal University,Baicheng 137000,China
3.Xi'an Key Laboratory of Active Photoelectric Imaging Detection Technology,Xi'an Technological University,Xi'an 710021,China
CLC Number:
- G202





| 1 | 党相卫, 秦斐, 卜祥玺, 等. 一种面向智能驾驶的毫米波雷达与激光雷达融合的鲁棒感知算法[J]. 雷达学报, 2021, 10(4): 622-631. |
| Dang Xiang-wei, Qin Fei, Bu Xiang-xi,et al. A robust perc-eption algorithm based on a radar and lidar for intelligent driving[J]. Journal of Radars, 2021, 10(4): 622-631. | |
| 2 | 王岩, 王飞, 王挺峰, 等. 基于自适应阈值的阵列激光三维点云配准[J]. 物理学报, 2016, 65(24): 271-281. |
| Wang Yan, Wang Fei, Wang Ting-feng, et al. Laser array imaging point cloud registration based on adaptive threshold[J].Acta Physica Sinica, 2016, 65(24): 271-281. | |
| 3 | 王庆闪, 张军, 刘元盛, 等. 基于NDT与ICP结合的点云配准算法[J]. 计算机工程与应用, 2021, 56(7): 88-95. |
| Wang Qing-shan, Zhang Jun, Liu Yuan-sheng, et al. Point cloud registration algorithm based on combination of NDT and ICP[J]. Computer Engineering and Applications, 2021, 56(7): 88-95. | |
| 4 | Chen C, Li Y, Wang W. A 3D sequential LiDAR data registration method for unmanned ground vehicle[J]. Applied Mechanics and Materials, 2014, 664: 365-370. |
| 5 | 闫利, 索一凡, 曹亮. 车载激光雷达点云与全景图像的配准[J]. 测绘科学, 2016, 41(4): 113-123. |
| Yan Li, Suo Yi-fan, Cao Liang. Registration of vehicle-bo-rne LiDAR point cloud and panoramic image[J]. Science of Surveying and Mapping, 2016, 41(4): 113-123. | |
| 6 | He Y Q, Mei Y G.An efficient registration algo-rithm based on spin image for LiDAR 3D point cloud models[J]. Neurocomputing, 2015, 151: 354-363. |
| 7 | Zong W P, Li M L, Zhou Y L, et al. A fast and accurate planar-feature-based global scan registration method[J].IEEE Sensors Journal, 2019, 19(24): 12333-12345. |
| 8 | 陈学伟,朱耀麟,武桐, 等. 基于SAC-IA和改进ICP算法的点云配准技术[J]. 西安工程大学学报, 2017, 31(3): 395-401. |
| Chen Xue-wei, Zhu Yao-lin, Wu Tong, et al. The point cloud registration technology based on SAC-IA and improved ICP[J]. Journal of Xi'an Polytechnic University, 2017, 31(3): 395-401. | |
| 9 | 赵海鹏,习晓环,王成, 等.基于车载激光扫描数据的城区道路自动提取[J]. 中国科学院大学学报, 2018, 35(6): 782-787. |
| Zhao Hai-peng, Xi Xiao-huan, Wang Cheng, et al. Automatic extraction of urban road information based on mobile laser scanning data[J]. Journal of University of Chinese Academy of Sciences, 2018, 35(6): 782-787. | |
| 10 | 王新竹,李骏,李红建, 等.基于三维激光雷达和深度图像的自动驾驶汽车障碍物检测方法[J]. 吉林大学学报: 工学版, 2016, 46(2): 360-365. |
| Wang Xin-zhu, Li Jun, Li Hong-jian, et al. Obstacle detection based on 3D laser scanner and range image for intelligent vechicle[J]. Journal of Jilin University(Engineering and Technology Edition), 2016, 46(2): 360-365. | |
| 11 | 宗长富, 文龙, 何磊. 基于欧几里得聚类算法的三维激光雷达障碍物检测技术[J]. 吉林大学学报: 工学版, 2020, 50(1): 107-113. |
| Zong Chang-fu, Wen Long, He Lei. Object detection based on Euclidean clustering algorithm with 3D laser scanner[J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(1): 107-113. | |
| 12 | 吴永兴. 利用超体素的车载激光点云杆状目标的提取[J]. 测绘地理信息, 2021, 46(4): 77-81. |
| Wu Yong-xing. Extracting pole-like objects in mobile laser scanning data with supervoxels[J]. Journal of Geomatics, 2021, 46(4): 77-81. | |
| 13 | Yu Y T, Li J, Guan H Y, et al. Automated extraction of urban road facilities using mobile laser scanning data[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(4): 2167-2181. |
| 14 | 赵成伟, 吴云东, 蔡国榕, 等. 基于超体素的LiDAR点云粘连目标分割算法[J]. 集美大学学报: 自然科学版, 2017, 22(1): 73-80. |
| Zhao Cheng-wei, Wu Yun-dong, Cai Guo-rong, et al. Research of segmentation algorithm for LiDAR point cloud based on supervoxel[J]. Journal of Jimei University(Natural Science), 2017, 22(1): 73-80. | |
| 15 | Li Y C, Liu Y, Sun R, et al. Multi-view point cloud registration with adaptive convergence threshold and its application on 3D model retrieval[J]. Multimedia Tools and Applications, 2020, 79: 14793-14810. |
| 16 | Zhou S T, Liu X L, Wang C Y, et al. Non-iterative denoising algorithm based on a dual threshold for a 3D point cloud[J]. Optics and Lasers in Engineering, 2020, 126 :105921. |
| 17 | 陈春旭,漆钰晖,朱一帆, 等. ICP配准算法的影响因素及评价指标分析[J]. 导航定位与授时, 2018, 5(5): 67-72. |
| Chen Chun-xu, Qi Yu-hui, Zhu Yi-fan, et al. The analysis of influence factors and evaluation indexes on ICP algorithm[J]. Navigation Positioning Timing,2018, 5(5): 67-72. | |
| 18 | Meng Y, Zhang H. Registration of point clouds using sample-sphere and adaptive distance restriction[J]. Visual Computer, 2011, 27(6-8): 543-553. |
| [1] | Xue-mei LI,Chun-yang WANG,Xue-lian LIU,Da XIE. Time delay estimation of linear frequency-modulated continuous-wave lidar signals via SESTH [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(4): 950-958. |
| [2] | Hui-jing DOU,Gang DING,Jia GAO,Xiao LIANG. Wideband signal direction of arrival estimation based on compressed sensing theory [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(6): 2237-2245. |
| [3] | Xin-yu JIN,Mu-han XIE, SUN-Bin. Grain information compressed sensing based on semi-tensor product approach [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(1): 379-385. |
| [4] | Li⁃min GUO,Xin CHEN,Tao CHEN. Radar signal modulation type recognition based on AlexNet model [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(3): 1000-1008. |
|
||