


�߿�ת��SBW��ϵͳ����ȡ���˻�е���ӣ���Ҫ��·�н���ģ����ơ���ˣ����ȷ��ģ��·���Ѿ���Ϊ�������о��ȵ㡣Ŀǰ��·��ģ���о�������Ҫ��Ϊ���֣��ٴ�������������ͨ����������������ת������Ļ������ػ�ת��������������������Ϊģ��·�е������ط�������ʻԱ�����ַ�������ȷ�������ڴ�������װ���Ѻ�����ϵͳ�ɱ������⣬��ʵ��Ӧ���н��١��ڼ��㷨�����ó�������ѧģ�ͼ��㷽��ȡ����װ��������ͨ����������̥�����Ͼ�Ȳ�������·�з�������[1]�����ڼ��㷽�����ѱ�֤·��ģ�⾫�ȣ�����е������ڶ���ѧģ�͵Ļ����Ͻ����۲������Ӷ���·�н���ģ��[2,3]�����㷨�������������ɱ��Ϳ���ʵ��·�з�����������·��ģ�⾫�ȷ�������о��ѵ㡣�ۺ�����������·����ģ�����ɵ��ص㣬��·�����Ϊ�������١������˶�״̬��·�渽��ϵ������Ϣ�ĺ���[4,5]�������ַ�����Ƶ�·�п��Գ�ַ�ӳ�����˶�״̬����ʻ·����Ϣ����ַ��ӳ�SBWϵͳ�����ƣ����������Կ����泵�ٺͷ�����ת�ǵȱ仯���仯�����������������ת��������·���������ص㡣
�����ۺϿ��Ǽ�ʻԱ��SBWϵͳģ��·�е���Ӧ�Ժͳɱ������⣬�ڷ���EPSϵͳ�������Եȿ����㷨�Ļ����ϣ���������������ơ��������ơ�������ƺ���λ���Ƶ��ۺ�·��ģ������㷨��ѡȡ��������˫Ŧ�����鹤����������SBWϵͳӲ���ڻ����飬����֤������Ƶ�·��ģ������㷨����Ч�ԡ�
����SBWϵͳ�ṹ�ص㣬��������ѧģ�͡���Ҫ�����������ܳɡ�·��ģ���ܳɡ�ת��ִ���ܳɡ�ת�����ܳɡ������ת�����ܳɡ����У��������ܳɱ�ʾΪ
ʽ�У�TswΪ��ʻԱ����ת�����أ�JswΪ�������ܳ�ת����������swΪ������ת�ǣ�BswΪ�������ܳ�����ϵ����KswΪת����Ťת�նȣ���mΪ·�е��ת�ǣ�GmΪ·�е�����������ٱȡ�
·��ģ���ܳɰ���·�е���ͼ����������֣��䷽��Ϊ
ʽ�У�TmΪ·�е��������أ�JmΪ·�е��ת��������BmΪ·�е������ϵ����KmΪ·�е��Ťת�նȡ�
·�е��ѡ����ˢֱ�������������ؿ��Ա�ʾΪ
ʽ�У�KiΪ·�е��ת��ϵ��������Ϊ������iaΪ·�е�������������aΪ·�е������Ч�ʡ�
ת��ִ���ܳɰ���ת��ִ�е����ת�����ܳ������֣��䷽��Ϊ
ʽ�У�TfΪת��ִ�е��������أ�JfΪת��ִ�е���ܳ�ת����������fΪת��ִ�е��ת�ǣ�BfΪת��ִ�е���ܳ�����ϵ����KfΪת��ִ���ܳ�Ťת�նȣ�GfΪת��ִ�е�����������ٱȣ�XrΪ����λ�ƣ�rpΪת����С���ֶַ�Բ�뾶��
ת��ִ�е��Ҳѡ����ˢֱ�����������Ϊ
ʽ�У�KjΪת��ִ�е��ת��ϵ��������Ϊ������ibΪת��ִ�е�������������bΪת��ִ�е���Ĺ���Ч�ʡ�
ת�����ܳ�ѡ�ó��ֳ���ת��������ʾΪ
ʽ�У�MrΪ����ת����������BrΪ����ת��������ϵ����Kkp1��Kkp2Ϊ����ת������Ťת�նȣ�NL1��NL2Ϊ����������ת��ǰ�ִ����ȣ���fw1����fw2Ϊ����ǰ��ת�ǡ�
����ת�����ܳɵĶ���ѧ���̱�ʾΪ
ʽ�У�Jfw1��Jfw2Ϊ����ǰ������������ת��������Bkp1��Bkp2Ϊ����ת����������ϵ����TAT1��TAT2Ϊ����ǰ���������������ء�
SBWϵͳ����ȡ���˻�еװ�ã������ת���Ħ��Ӱ���С�����о�Ϊ�˿��Ǽ�ʻԱ��SBWϵͳ·�е���Ӧ�ԣ��Ա����˸�Ħ�����䷽��Ϊ[6]
ʽ�У�TgΪת��ϵͳ��Ħ�����أ���sΪĦ���ɳڽǣ�Ϊ������fkpΪ��̬��Ħ�����أ�C0��C1��C2Ϊ�淽����ת�DZ仯��ϵ����
��SBWϵͳ����ѧģ����CarSim�����������ϣ�����·��ģ����Ʋ��ԵĿ����ͷ�����֤�����У�SBWϵͳģ����Ҫ�Ļ�����������������CarSim����ģ���ṩ��ͬʱSBWϵͳģ�ͽ�����ǰ��ת�����뵽����ģ�͡�
��Ч��·����Ϣ�������ʻԱ���������˶�״̬����ʻ·��״����Ϣ���ǽ������Ӿ��ļ�ʻ��Ϣ��Դ��
���ٶ�·�е�Ӱ�졣ͨ����ʻԱϣ����������ʱ����ת������ԣ�����������ʻʱ�����·�й�С��ʹ��ʻԱ�С���Ʈ���ĸо�����˸�����ʻӦ��֤·��������
������ת�Ƕ�·�е�Ӱ�졣Ҳ�ܵ����ٵļ��Ӱ�졣��������ת����ʻʱ��ͨ�������ϴ�ķ�����ת�Ƿ�Χ����ʻԱϣ��·�з����淽����ת�����Ӷ������ǹ������ɼ�ʻԱת��������������ʻʱ����ʻԱת��������ת��ֻ��һ����С��Χ�ڣ�ͨ����Ϊ����������������������ʻԱϣ�����ŷ�����ת�ǵı仯·�з���Ҳ�н����Եı仯��������һ�����ݶȣ�ʹ��ʻԱ���ԽϺõظ���·�б仯����������ת���˶�������ν�ĸ���·������[7,8]��
����ر��������о��У�ͨ����Ϊ������ٶ���·��֮�����������ϵ[9,10]��������ٶ���������Ҫ����Ӧ���ԣ��������ͨ��·�з�����֪������ٶȵı仯�������ڼ�ʻԱ����������ת����ơ���ˣ�·���о�ͨ����С������ٶȷ�Χ�����һ�������ݶȣ���������ת����Բ�����ٶȵı仯�ʡ�
�ڴ�ͳת��ϵͳ�У�·����ͨ����е����װ�ô����������̵ļ�ʻԱ�������أ���������Ҫ��ϵͳ�������ء�Ħ�����غ�����ϵͳ�����������ۺ��������ɡ���ˣ�ֻҪ�������������ֵ�Ϳ��Եõ�ת��ϵͳ·�С�
SBWϵͳ����ȡ���˻�е����װ�ã�����ת��ִ�е�����Ƴ���ת���˶������Խ�ת��ִ�е����������غ�ת���أ��������ֻ������ء�Ħ�����ء����صĹ��Ժ����ỷ�ڵȣ����е�Ч���������⣬��������������������һ��������ϵ�����ֻҪ�ṩ������������������������Ϳ��Լ�ӵõ��������ء�ת��ִ�е�����ؼ��㷽����������̣�5����
���������·�еķ�������������·��ģ�����ط��̣���ʾΪ
ʽ�У�TassistΪת��ϵͳ�����������ء�
�ο���ת�Ǵ�����EPSϵͳ�������Ʋ��ԣ��������������淽����ת�Ǻͳ��ٱ仯���仯�������ʾΪ
ʽ�У�KaΪ������ת���������ӣ�KvΪ�ٶ��������ӣ�vΪ���١�
Ϊ���������ת��ϵͳ�Ļ������ܣ�EPSϵͳ���������ƵĻ����ϣ�һ������������������㷨��
ʽ�У�TbΪ����������أ�KbΪ�����������ӡ�
��ͳת��ϵͳ��ͨ����еװ������ת��ļ���λ�õģ���SBWϵͳ����ȡ���˻�е���ӣ���Ҫ����λװ�ý���������ơ�������û�еװ����λ��������SBWϵͳת�Ǵ����ȿ���������Ƶ��ص㣬������ϵͳ�ɱ������ԡ���ˣ���������·����ģ�����ɵ��ص㣬���������㷨ʵ����λ���ܣ�����ת����ת������λ��ʱ��������λ���أ�ʹ��ʻԱ��������������ת�ǣ��������λ�ÿ��Ը����о������趨�����ƿ������ر�ʾΪ
ʽ�У�TlΪ��λ�������أ�KlΪ��λ�������ӣ�����swΪ��еλ���뵱ǰλ�õĽǶȲ��left����rightΪ����������ת�ǵļ���λ�á�
���ϣ�·��ģ��������ؿ��Ա�ʾΪ .
.
SBWϵͳ����ȡ���˻�е����װ�ã�ϵͳ�з�������ʵ������������ںܴ�Σ���ԣ���˿����㷨�辭�������֤���ܽ���ʵ�����顣����ѡȡӲ���ڻ����鼼���������·��ģ����Ʒ���������֤��Ӳ���ڻ�����̨��Ҫ������ʻģ������SBWϵͳӲ��������ģ���ܳɺͿ��ƿ���ԭ��ƽ̨�IJ��֣��ټ�ʻģ�������������ɶ���������ѧģ�ͣ���������������鹤����������Ϊ��ʻԱ�ṩ���õ��Ӿ�������������Ϣ����SBWϵͳӲ����Ҫ�����������ܳɡ�·��ģ���ܳɺ�ת��ִ���ܳɡ��������ܳ����ڼ�ʻԱ����ת���źţ�·��ģ���ܳ��������·�з������أ�ת��ִ���ܳ�����ִ��ת��ִ�е������ָ���������ת���˶�����Ϊ����ʵģ����̥�������������أ�ʵ�ֶ�·����������ʵģ�⣬����̨����������ģ���ܳɣ�ͨ����������ѧģ�ͼ����ת������������������ͨ������ģ����������ؼ��أ�������̨�ĵ�ز��ֲ���xPC Target����ʵ�֣�·��ģ������ת��ִ�е����������·���ֲ���MOS�ܴH����ɡ�����̨��ͼ1��ʾ��.
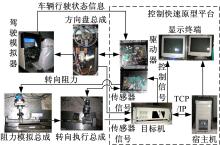 | ͼ1 SBWϵͳ����̨Fig.1 Test bench of SBW system |
Ϊ����֤��Ƶ�·��ģ�����Ч����������������˫Ŧ��ת�����鹤���Կ��Ʋ��Խ�����֤��Ϊ���о��߿�ת��ϵͳ·��ģ������㷨����ת��Ǵ���������Ϊ�봫ͳת��ϵͳ��ͬ�ij�����������ز������£��������ܳ�ת������JswΪ0.039 kg��m2���������ܳ�����ϵ��BswΪ0.0021 kg��m2��s-1��ת����Ťת�ն�KswΪ98 N��m��rad-1��ת��ϵͳ������iswΪ20.5��·��ģ����ת��ϵ��KiΪ0.065 N��m��A-1��ת��ִ�е��ת������JfΪ0.00087 kg��m2��ת��ִ�е������ϵ��BfΪ0.003 kg��m2��s-1��ת��ִ�е��Ťת�ն�KfΪ132 N��m��rad-1��ת��ִ�е��ת��ϵ��KjΪ0.065 N��m��A-1������ת��������MrΪ32 kg��ת������������ϵ��BrΪ1700 kg��m2��s-1������ת������Ťת�ն�Kkp1��Kkp2��Ϊ0.785 kg��m2������ת�������������ϵ��Bkp1��Bkp2��Ϊ0.785 kg��m2��s-1��
������ת��������У�����Ϊ100 km/h��������ת�ǽ����������룬����ԼΪ5 s��ʹ������ٶȷ�ֵ������0.2g(g=9.8 m/s2)���ҡ�������ת�����鹤����Ҫ���ڿ�������������ʻʱ��·�С�ͼ2��ͼ3�ֱ��Ǵ�ͳת��ϵͳ��SBWϵͳ������ת���������ߡ��������鹤������ָ��Ա�����ϵͳ�������������ٷ�����ת��Ϊ0ʱ��SBWϵͳ������ٶ�С�ڴ�ͳת��ϵͳ��������˵��ǰ��ת��������ܸ��ã��ڲ�����ٶ�Ϊ0ʱ��SBWϵͳ·������С�ڴ�ͳת��ϵͳ������Ҫ������SBWϵͳȡ���˻�е���ӣ���ϵͳĦ��Ӱ���С���۲�����ٶ�Ϊ0��0.1g��ת���ݶȶԱȱ�����SBWϵͳ�ڲ�����ٶ�Ϊ0��ת���ݶȴ��ڴ�ͳת��ϵͳ�����ڲ�����ٶ�Ϊ0.1gʱ��ת���ݶ�С�ڴ�ͳת��ϵͳ����˵��SBWϵͳ·�и�������������ǿ��ʻԱ���ģ���֤�˱����㷨����Ч�ԡ�
˫Ŧ��ת��������У�������(10��2) km/h��һ����·����ʻ����Ҫ������������ת������ԡ�����Ŀǰ������ƥ��������ϵͳ����˼������������������������Ҫ��Ϊ����SBWϵͳ��������Խ�ԣ�����������·��ģ������㷨����У��跨������Ħ����·�е�Ӱ�졣ͼ4��ͼ5�ֱ��Ǵ�ͳת��ϵͳ��SBWϵͳ˫Ŧ��ת���������ߡ��������鹤������ָ��Ա�����ϵͳ��������������SBWϵͳ��������С�ڴ�ͳת��ϵͳ����SBWϵͳת������Ը��ã�������SBWϵͳ���ܸ�Ħ����Ӱ�죬��·�е�Ħ���ͻ�����С�ڴ�ͳת��ϵͳ��������Ҫǿ�����ǣ�����������ʻʱΪ�˱�֤ת������ԣ����Ժ��Ը�Ħ����Ӱ�졣Ȼ��������������ת����ʻʱ��Ϊ��֤·����������Ҫ����ת���Ħ���������ء�
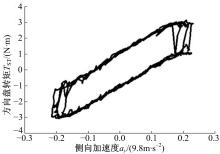 | ͼ2 ��ͳת��ϵͳ����������Fig.2 On-center handling test results by traditional steer |
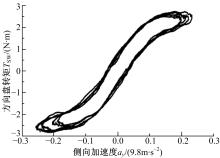 | ͼ3 �߿�ת��ϵͳ����������Fig.3 On-center handling test results by SBW |
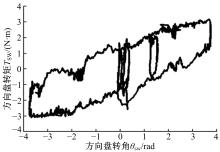 | ͼ4 ��ͳת��ϵͳת�����������Fig.4 Steering efforts test results by traditional steer |
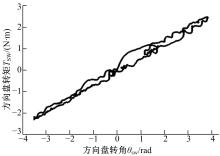 | ͼ5 �߿�ת��ϵͳת�����������Fig.5 Steering efforts test results by SBW |
��1��ͨ��������ͳת��ϵͳ·�в���������������SBWϵͳ����ѧģ�ͣ�Ϊ·��ģ����Ʋ��Եļ���������о�����֤�ṩ����֧�š�
��2�������ͳEPSϵͳ�������Եȿ����㷨�����SBWϵͳ�ṹ�ص㣬�о��˰����������ơ�������ƺ���λ���Ƶ��ۺ�·��ģ������㷨��Ӳ���ڻ�������������������Ƶ�·��ģ������㷨����Ϊ��ʻԱ�ṩ��Ч��·����Ϣ�������ʻ����
��3��ͨ����������������ת���������������봫ͳת��ϵͳ��ȣ�SBWϵͳ·�л������ܸ��ã�·�и�������������ǿ��ʻԱ���ġ�
| [1] | Verschuren Robert, Zuurbier Joost. The TNO environment for steering system development[C]��Proceeding of AVEC, 2004: 791-795. [��������:1] |
| [2] | Coudon Julien, Canudas-de-Wit Carlos, Claeys Xavier. A new reference model for steer-by-wire applications with embedded vehicle dynamic[C]��Proceedings of the American Control Conference, 2006: 3990-3995. [��������:1] |
| [3] | Morgando Andrea, Velardocchia Mauro. Steering feedback torque definition and generation in a steer by wire system[C]��SAE Paper, 2008-01-0948. [��������:1] |
| [4] |
|
| [5] | Hiraoka Toshihiro, Nishihara Osamu, Kumamoto Hiromitsu. Steering reactive torque control of steer-by-wire vehicle[C]��Proceeding of AVEC, 2006. [��������:1] |
| [6] |
|
|
|
|
| [7] | Heathershaw Andrew. Developments in on-center steering evaluation and testing[C]��SAE Paper, 2006-01-0796. [��������:1] |
| [8] | Salaani M K�� Johnson J R�� Williams D E. Steering system effects on on-center handling and performance[C]��SAE Paper, 2004-01-1074. [��������:1] |
| [9] | ISO 13764-1. Road vehicle�� test method for the quantification of on-center handling[S]. 2003. [��������:1] |
| [10] | Bertollini G P�� Hogan R M. Applying driving simulation to quantify steering effort preference as a function of vehicle speed[C]��SAE Paper, 1999-01-0394. [��������:0] |