

�ƶ��������ռ����ѳ�Ϊ��϶������������綯������ȼ�ϵ������������Դ�������ܼ��ŵ���Ҫ����֮һ[1]�������ڴ��綯�γ�,���ڽ����õ����Ϊ��һ����װ��,������ʽϻ�϶��������������,�Ӷ�����˵�����ƶ�����,ʹ�ƶ��������յĽ���DZ���õ���һ������[2,3]�����綯�γ��ĺĵ�������������й�,��ͬ�����й�������������,�ƶ��������յĽ���Ч����������ͬ[4]�����ĴӺĵ�������,��������������,ȷ����ͬ�����ڲ�ͬ���й������ƶ��������յĽ���DZ��,Ϊ����ѡ�ͺͲ���ƥ���ṩ�������ݡ�ͬʱ,Ϊ�˶��ƶ���������Ч����������,�������ƶ����������,�����ƶ��������ձ���,��һ�������˲�ͬ�����ڲ�ͬ�����µ��ƶ���������Ч��,����Cruise��������������˶Աȡ�
��ͼ1��ʾ,�������˶��������ܵ����������������������¶������ͼ�������[5],���ĺ����¶�����,�����ƶ�����ͬ�ڸ���������,���������������ʽ:
ʽ��:FTΪ��������;MΪ��������;fΪ��������ϵ��;CDΪ��������ϵ��;AΪӭ�����;��Ϊ�����ܶ�;��Ϊ������ת��������ϵ��;vΪ����;g=9.8 m/s2��
 | ͼ1 �����˶�������������Fig.1 Force analysis of moving vehicle |
�ڳ�������������,���������ڿ˷��������������������ͼ�������;�ڳ����ƶ�������,�������������������������һͬ�˷��������������,�������ʼ�������:
��ʽ(2)����������Ϊ
��ʽ(2)���ƶ�����Ϊ
��ͼ2��ʾ,������������,��ص���Qbatת��Ϊ����EQ,������ء����������ϵ��������,���������������ET;���ƶ�������,�ƶ�����EB����ȫ����,�������ܹ����յ�����ռ���ƶ������ı���Ϊ��,��Ӵ���ϵ���յ�����Ϊ ���վ�������͵��ת���ĵ���Ϊ
���վ�������͵��ת���ĵ���Ϊ ͼ2��ʾ������������,
ͼ2��ʾ������������, Ϊ����ϵ�������,EmotΪ����������,EdchgΪ����������;�ƶ�������,
Ϊ����ϵ�������,EmotΪ����������,EdchgΪ����������;�ƶ�������, Ϊ����ϵ��������,EgenΪ�����������,EchgΪ���������������drvΪ����ϵ��еЧ��,��motΪ�������Ч��,��genΪ�������Ч��,��dchgΪ��طŵ�Ч��,��chgΪ��س��Ч�ʡ�
Ϊ����ϵ��������,EgenΪ�����������,EchgΪ���������������drvΪ����ϵ��еЧ��,��motΪ�������Ч��,��genΪ�������Ч��,��dchgΪ��طŵ�Ч��,��chgΪ��س��Ч�ʡ�
 | ͼ2 ���綯�γ�����������Fig.2 Energy flowing of pure electric vehicle |
�����������������,�ɵõ���������������ĺĵ���Ϊ
�ƶ������л��յ��ĵ�ص���Ϊ
���ڴ��綯�γ�,��ʵ�����й����е���͵��Ч����ʵʱ�仯��,ȡ��ƽ��Ч��,��ʽ(3)(4)����ʽ(5)(6)��
��������,���綯�γ��ĵ���Ϊ
Ϊ�˷�����������DZ��,���Ķ����������ܶȦ�regΪ�ƶ�����������Ч�ĵ��������ƶ���������ʱ�ĵ���֮��,����ʽ:
��ʽ(7)(8)(10),��
��ʽ(2)(3)(4),��
ʽ�еij���v����ѭ��������صġ�����ѡȡ3�ֵ�����NEDC��Japan 1015��UDDS���з�����ѡȡ���ֵ��ͳ���,������1��ʾ�ij����ؼ�����,����ʽ(11),�����ƶ��������ձ��������������ܶȦ�reg֮��Ĺ�ϵ,��ͼ3��ʾ��
����ͬһ���,J1015�������ƶ���������Ч�����,�������ܶ����,NEDC�������������ܶ���͡�����ͬһ������,����I���������ܶȸ��ڳ���II,�ƶ��������ձ���Խ��,�������ܶȲ��Խ��
| ��1 �����ؼ�����Table 1 Key parameters and average efficiency of vehicle |
 | ͼ3 ����DZ���Աȷ���Fig.3 Comparative analysis of energy-saving potential |
���������ƶ�������ԭ��[6],����ѡȡ���ֲ�ͬ���ƶ��������տ��Ʋ���:�������Ʋ��Ժ�Э�����Ʋ����������ƶ���������Ч����
(1)��������
����װ����ͳĦ���ƶ�ϵͳ�Ĵ��綯�γ�,����ƶ�����Ħ���ƶ����Ƕ��������ġ��ÿ��Ʋ��Ը��ݼ�ʻԱ�����ƶ�ǿ��,��̤����г̷�Χ�ڵ��ڵ���ƶ���,��Ħ���ƶ�����������,�ƶ���������ͼ4��ʾ��
�ƶ��������ձ������������¹�ϵ:
ʽ��:PregΪ��������ƶ�����;PhydΪĦ���ƶ�����;FregΪ��������ƶ���;Fhyd_fΪǰ��Һѹ�ƶ���;Fhyd_rΪ����Һѹ�ƶ���;Tmotor_maxΪ�����������ƶ�����;iΪ������;rΪ��̥�����뾶;zfreeΪ�ƶ�ǿ�����ޡ�
(2)������
Ϊ��ʵ���ƶ������������,��Ҫ��Ħ���ƶ�ϵͳ���иĽ�,ʵ������ѹ�����ָ�ѹ���Ľ���[7],�Ӷ�ͨ��Һѹ���ڵ�Ԫ��ȷ�����ƶ�ѹ��,��Э����ϵ���ƶ���,��֤�ܵ��ƶ��������ʻԱ����,ʵ���ƶ�ǿ�ȵ�һ���ԡ�
�ƶ���������ͼ5��ʾ,��Ҫ��Ϊ������:�ٵ��ȫ�ƶ��Ρ������ƶ�̤��IJ���,�ƶ��ָײ���ѹ,��ͨ�����Ƶ���ƶ��������ʻԱ�ƶ�����,���ƶ���ͨ��������Сǿ�������;��Һѹ�ƶ������Ρ����ǵ��ƶ����������,�ƶ���������һ���̶�,��Ҫ����Һѹ�ƶ������в���;�۵�ҺЭ�������Ρ����ź���Һѹ�ƶ����ﵽ�����ƶ���Ҫ���,ǰ���ƶ�������������������ƶ�������,ͬʱ,��Ҫ��ǰ���Ͼ����ܵ����õ���ƶ�����
�ƶ��������ձ������������¹�ϵ:
ʽ��:��IΪ�����ƶ�������ʱǰ���ƶ���ռ�ܵ��ƶ����ı���;z1��z2�ֱ�Ϊ�ƶ�ǿ�����ޡ�
 | ͼ4 �������Ʋ����ƶ�������Fig.4 Braking force allocation of independent control strategy(ICS) |
 | ͼ5 Э�����Ʋ����ƶ�������Fig.5 Braking force allocation of coordinate control strategy(CCS) |
����ʽ(14)(15)��֪,�ƶ��������տ��Ʋ�����Ӱ����������Ч���Ĺؼ���������:�ƶ�ǿ������(���������е�zfree��Э�������е�z1��z2)�͵������ƶ�����Tmotor_max��
(1)�ƶ�ǿ������
���ڶ������Ʋ���,���ݴ�ͳ�ƶ�ϵͳ�����г����̤���г����ƶ����ٶȵĹ�ϵ,���ݵȱ���ԭ��,����ʽ(16)��������ֵzfree��
sfreezfree=statol��sfreezmax(16)
ʽ��:sfreeΪ�ƶ�̤����г�;stotalΪ�ƶ�̤�����г�;zmaxΪ����ƶ����ٶȡ�
����Э�����Ʋ���,z1��ECE����ȷ��,z2��z1�������ƶ����������������
����ECE����ɵ��ƶ�������ϵ�������ƶ�ǿ��z�Ĺ�ϵ������ͼ6��ʾ,����LΪ���,hΪ���ĸߡ���Сǿ���ƶ�ʱ,������ƶ�������ϵ��û���ϸ������,�ƶ���������ȫ��ǰ���ṩ,��ʱ�ƶ�������ϵ����Ϊ1�����,���ͼ6��A�����=1�ߵ���ཻ��,������Ӧ���ƶ�ǿ�ȼ�Ϊ�ƶ�ǿ������z1��
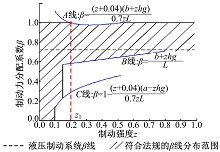 | ͼ6 �ƶ�������ϵ�� �� ���ƶ�ǿ�� �� �Ĺ�ϵ����Fig.6 Relation curve of braking force allocation rate �� and braking strength �� |
 z=z2ʱ:Ftotal_f=Fhyd_f+Freg=Mg��z1(17).
z=z2ʱ:Ftotal_f=Fhyd_f+Freg=Mg��z1(17).Ftotal_r=Ftotal_f��I��Ftotal_f=Mg��z11����I��I(18)
����ʽ(17)(18)�ɵ�z2
z2=Ftotal_f+Ftotal_rM=z1��I(19)
ʽ��:��I=b+hg��z2L,���
z2=��b+b2+4hgLz12hg(20)
(2)�����������ƶ�����
�����������ƶ������ɵ�������Ծ���,�����ƶ�����,��������ڵ�������,�����ڳ��ٽϵ�ʱ,����ƶ�����Ҫ��С�˳�,��˵����������ƶ������������¹�ϵʽ:
Tmotor_max=f(n),n
Tmax,nmin��n��nbase
9550Pmax/n,n>nbase
(21)
ʽ��:f(n)������ת�ٱ仯�����Ժ���;TmaxΪ��Ť����ʱ���������ƶ�����;PmaxΪ�㹦����ʱ���������ƶ�����;nminΪ����˳������ת������,nbaseΪ������١�
��������ת��֮��Ĺ�ϵ����:
v=2��n60��rwheeli(22)
��ʽ(21)(22)��
Tmotor_max=F(v),v
Tmax,vmin��v��vbase
1000Pmaxrwheelv��i,v>vbase(23)
ʽ��:F(v)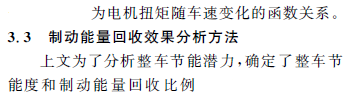 ��֮��Ĺ�ϵ,��ʽ(11)��������ʽ(14)(15),���복�������͵�����������,���Գ���v���������ٶ�dv/dtΪ���������亯��,���ұ����������ƶ�ǿ������ȷ������˿�����ʽ�����������ܶȦ�reg:
��֮��Ĺ�ϵ,��ʽ(11)��������ʽ(14)(15),���복�������͵�����������,���Գ���v���������ٶ�dv/dtΪ���������亯��,���ұ����������ƶ�ǿ������ȷ������˿�����ʽ�����������ܶȦ�reg:
��reg=����~2drv��~gen��~chg��~mot��~dchg��PT<0��PTdt��PT>0PTdt
(24)
��PT<0PTdt/��PT>0PTdt=
��PT<0��vdt��Mg��f+��PT<0��v3dt��CDA��/2+��PT<0��vdvdtdt����M��PT>0vdt��Mg��f+��PT>0v3dt��CDA��/2+��PT>0vdvdtdt����M(25).
��ͼ7��ʾ,��Matlab/Simulink�н�������ģ��,����Ϊѭ���������ݺ���������,ͨ�������ƶ��������ձ���������Ȩֵ,������������ܶȡ�����,�ƶ��������ձ����ֱ�Ͷ������Ʋ��Ժ�Э�����Ʋ��Խ��м���,����Ȩֵ��Ҫ����ѭ�������ij��ٺͼ��ٶȼ��㡣
 | ͼ7 �����������ͼFig.7 Flow chart of simulation |
��������Cruise����ƽ̨��Ŀ������֤�����ƶ���������Ч�����㷽������Ч�ԡ���Cruise�н�������ģ�ͺͿ��Ʋ���ģ��,ͨ�����治ͬ��������ͬ���Ͳ����Ͳ�ͬ���Ʋ����µ������ĵ���,�ɼ����������ܶ�,����ʽ
ʽ��:Q1Ϊδ�����ƶ��������չ��ܵ������ĵ���;Q2Ϊ�����ƶ��������չ��ܵ������ĵ�����
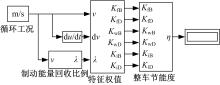
ѡȡ���������Ͳ���,�ֱ���NEDC��UDDS��J1015ѭ��������,�Զ������Ʋ��Ժ�Э�����Ʋ��Խ����˶Աȷ���,��������ͼ8��ʾ,����I���������ܶ�������Ҫ���ڳ���II,����ͬһ����,NEDC�������������ܶ����,J1015�����Ը���UDDS����,���2������������������DZ��һ�¡����ļ��㷽����Simulink��������Cruise�ķ��������,����,����һ��,�ܹ��ܺõط�ӳ��������Ч��,��ȫ������������DZ��������Ҫ��
�Գ���I��NEDC�����µķ�����Ϊ��,������ͬ���Ʋ����µ��ƶ��������ձ���,����Cruise����ƽ̨�Ա�,��ͼ9��ʾ��
�ԱȽ������,����������ƶ��������ձ������㷽��,��Cruise�п��Ʋ���ʵ�ֵ��ƶ���������һ�µ�,�����ƶ���������Ч�����������Ҫ��
 | ͼ8 �������ܶȷ������Աȷ���Fig.8 Energy-saving rate analysis |
 | ͼ9 �ƶ��������ձ������Աȷ���Fig.9 Analysis of braking energy recovery ratio�� |
ͨ���Դ��綯�γ�����������ķ���,�����������ĵ����빤������������������Ч���Լ��ƶ��������ձ���֮��ĺ�����ϵ,�о��������й����Գ����ƶ��������յĽ���DZ��Ӱ��ϴ�,�������ƶ����������������,���Ͳ�����Ӱ��Ҳ�������ڶ��ƶ���������Եķ���,��һ�������ƶ��������ձ���,����Matlab/Simulink��������ģ��,����������ܶȵļ���,����AVL/Cruise���������жԱȷ���,����������ķ����ܺܺõط�ӳ��������Ч��,��ȫ������������DZ��������Ҫ��
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|