
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
电机四象限运行的直接转矩控制动态加载
[王德成 , 林辉]
, 林辉]
, 林辉]
|
|


王德成(1981),男,讲师,博士.研究方向:电机控制,故障诊断.E-mail:wangdecheng@nwpu.edu.cn
提出了一种基于直接转矩控制的异步电机动态加载方法。以工作在直接转矩控制模式下的异步电机作为加载电机,通过减速机和被测电机连接。根据被测电机的运行状态和所需负载转矩特性,计算加载电机的给定转矩,使加载电机在直接转矩控制模式下四象限运行提供加载转矩。以永磁同步电机调速系统为对象的仿真实验结果表明:该方法可以快速准确地提供动态加载所需转矩,并减小加载电机转矩波动对动态加载的影响。
A new dynamic loading approach is proposed, which is based on asynchronous motor direct torque control. An asynchronous motor under direct torque control model is selected as the loading motor. It is connected to the testing motor through a speed reducer. The direct torque control instruction of the loading motor is determined by the running condition and load torque features of the testing motor. The loading motor works at four quadrant operation, providing demanded torque to the testing motor. The proposed method was applied on permanent magnet synchronous motor speed control system. Simulation result shows that the proposed approach can provide dynamic loading demanded torque quickly and exactly. It can also reduce torque ripple influence on the dynamic loading induced by direct torque control.
随着电力电子技术和变频调速技术的发展,交流电机伺服系统已经逐步取代传统步进伺服系统和直流伺服系统,成为当代伺服系统的主流[ 1, 2]。交流伺服系统应用领域的扩大,使得交流电机由电动运行状态拓展到四象限运行[ 3, 4, 5]。交流伺服系统中,要求电机的运行状态快速、准确地跟随输入指令信号变化。电机控制系统性能直接影响交流伺服系统性能。在交流伺服系统研制中,如电动舵机,能有效地对电机控制系统进行加载测试,有助于提高系统性能和研制速度。传统的方法以磁粉制动器作为负载,测试电机电动运行状态下的稳态控制性能,但不能测试电机动态控制性能[ 6, 7]。文献[ 8, 9, 10]采用测功机作为负载,可以测试电机控制的稳态性能和动态性能,但不适于四象限运行的电机。直接转矩控制技术是继矢量控制技术之后发展起来的变频调速技术,转矩响应迅速,为电机控制系统性能测试提供了新思路[ 11, 12]。
本文提出一种基于异步电机直接转矩控制技术的电机控制性能加载测试方法。将该方法应用于永磁同步电机调速系统加载仿真实验,结果证明了本文方法的有效性和可行性。
异步电机在α-β旋转坐标系下的电压方程为
 | (1) |
式中: us α、 us β、 ur α、 ur β、 is α、 is β、 ir α、 ir β分别为定子电压、转子电压、定子电流、转子电流在 α轴和 β轴的分量; Rs、 Rr分别为定子电阻和转子电阻; Ls、 Lr、 Lm分别为定子电感、转子电感、互感; ωr为电机转速; p为微分算子。
磁链方程为
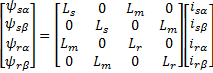 | (2) |
式中:ψs α、ψs β、ψr α、ψr β分别为定子磁链、转子磁链在α轴和β轴的分量。
转矩方程为
Te =pn Lm( is β ir α - is α ir β) (3)
式中: pn为极对数。
由式(1)(2)(3)可得:
 | (4) |
式中: θ为磁通角。
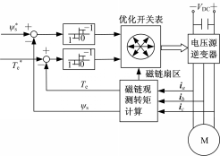
根据式(4)可知,在实际运行中保持定子磁链幅值恒定,转子磁链幅值由负载决定,改变磁通角 θ即可达到控制转矩的目的。直接转矩控制的原理框图如图1所示。通过定子电流进行磁链观测和转矩计算,利用滞环比较器输出转矩和磁链的增、减信号。根据滞环比较的输出结果、定子磁链所在扇区、优化矢量开关表,确定最优给定电压矢量。
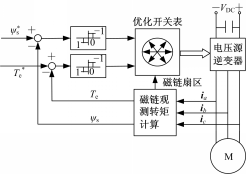 | 图1 直接转矩控制原理框图Fig.1 Block diagram of direct torque control principle |
基于直接转矩控制技术的电机四象限运行动态加载系统中,被测电机、减速机、加载电机三者同轴连接,其中减速机的高速端连接被测电机。采用电机进行动态加载时,轴系的旋转会使加载过程产生多余力。为了准确提供所需加载转矩,加载过程中需要对多余力进行消除。
高速端到低速端的轴系整体转动惯量为
J=J1+J2+J3/n2 (5)
式中:J1为被测电机转动惯量;J2为减速机转动惯量;J3为加载电机转动惯量;n为减速机的减速比。
被测电机输出转矩与转速方向相同时,被测电机输出的电磁转矩一部分用于维持自身转子的旋转,另一部分作为负载转矩输出,即
 | (6) |
式中:T be为被测电机电磁转矩;ω为被测电机旋转角速度;T bl为被测电机负载转矩。
被测电机负载转矩一部分消耗在减速机旋转上和加载电机转子旋转上,另一部分消耗在加载电机上。加载电机转子旋转所需转矩折合到高速端为
 | (7) |
式中:η为减速机效率。
加载电机输出的电磁转矩为:
 | (8) |
将式(7)代入式(8)可得:
 | (9) |
被测电机输出转矩与转速方向相反时,需要加载电机提供轴系旋转的动力。加载电机输出电磁转矩一部分为自身转子的旋转提供转矩,另一部分作为负载转矩输出,即:
 | (10) |
式中:T ll为加载电机负载转矩。
加载电机负载转矩一部分消耗在减速机上,另一部分作为被测电机的负载转矩。被测电机的负载转矩为
 | (11) |
根据所需被测电机负载转矩特性,由式(9)(11)计算出加载电机所需电磁转矩,作为直接转矩控制的转矩给定信号,可实现对被测电机控制系统的动态加载测试。
采用上述加载方法,进行电机四象限运行动态加载的步骤如下:
(1)将被测电机、减速机、加载电机通过联轴节进行同轴连接,并使三者具有较好的同轴度。
(2)让被测电机按照给定指令运行。
(3)测量轴系的加速度。
(4)根据式(9)(11)计算加载电机的给定转矩指令。
(5)控制加载电机按照给定转矩指令输出相应的转矩。
(6)分析电机控制系统性能。
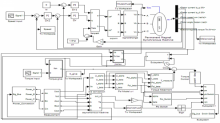
采用永磁同步电机调速系统的动态加载实验,验证本文方法的有效性。永磁同步电机作为被测电机,异步电机作为加载电机。采用的永磁同步电机参数为:相电阻为0.875 Ω,d轴电感为8.5 mH,q轴电感为8.5 mH,转动惯量为6.35×10-4 kg·m2,极对数为4。减速机参数:减速比为10,效率为0.98,转动惯量为1×10-5 kg·m2。采用的异步电机参数为:定子电阻为0.435 Ω,定子电感为4 mH,转子电阻为0.816 Ω,转子电感为2 mH,极对数为2。利用Matlab/Sminlink建立的模型如图2所示,其中永磁同步电机工作在直轴电流为零的矢量控制模式下。
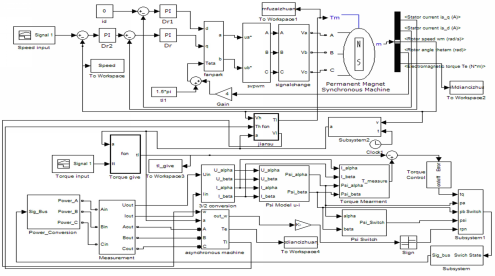 | 图2 永磁同步电机调速系统加载模型Fig.2 Loading model of permanent magnet synchronous motor speed control system |
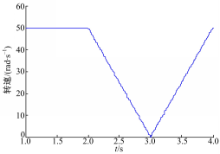
电机启动之后,1~4 s对应的转速给定控制曲线如图3所示。在图3所示的给定转速控制曲线下,为考核永磁同步电机调速系统工作在第一象限、负载转矩为1 N·m时的调速性能,加载电机的电磁转矩和被测电机的负载转矩如图4所示。加载所对应的转速反馈误差如图5所示。
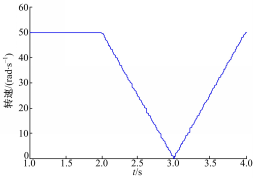 | 图3 给定速度曲线Fig.3 Given rotating speed curve |
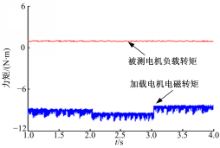
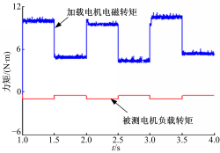
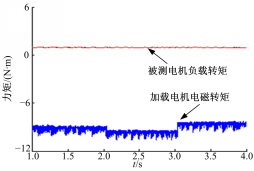 | 图4 恒定加载力矩下的加载电机电磁转矩和被测电机负载转矩Fig.4 Loading motor electromagnetic torque and testing motor load torque with constant loading torque |
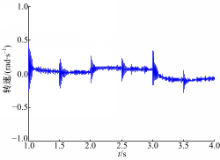
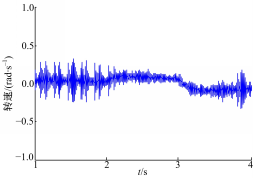 | 图5 恒定加载转矩下反馈转速误差Fig.5 Speed feedback error with constant loading torque |
图4中,为了使被测电机的负载转矩为1 N·m,恒速阶段、减速阶段、加速阶段的加载电机电磁转矩是不同的。这是由于加载过程中轴系旋转引起的多余力造成的。多余力的大小取决于轴系的加速度,以及减速机和加载电机的转动惯量。图4中,加载电机的电磁转矩能够跟随控制指令快速地变化,在转矩变化的拐点处,具有较小的过渡过程。这是由于直接转矩控制的快速响应特性产生的。虽然直接转矩控制中采用的转矩误差阈值为±0.5 N·m,但是图4中的负载转矩波形中脉动较小。这是由于采用10倍的减速机将直接转矩控制引起的转矩脉动降低了10倍的原因。
图5中,恒速、加速、减速三个阶段中最大转速误差为0.329 rad/s。图5中的曲线表明该调速系统能够在第一象限且负载转矩为1 N·m时稳定工作。
在图3所示给定转速控制曲线下,为考核永磁同步电机调速系统是否能够在变负载转矩下稳定工作,采用本文方法进行动态加载,其中负载转矩在[-0.5 -1] N·m区间以1 Hz频率进行切换。加载电机的电磁转矩和被测电机的负载转矩如图6所示。加载所对应的转速反馈误差如图7所示。
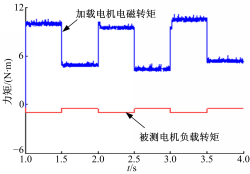 | 图6 变加载力矩下的加载电机电磁转矩和被测电机负载转矩Fig.6 Loading motor electromagnetic torque and testing motor load torque with varying loading torque |
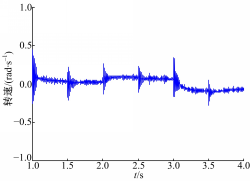 | 图7 变加载转矩下反馈转速误差Fig.7 Speed feedback error with varying loading torque |
图6中,负载转矩波形在恒速阶段、减速阶段、加速阶段均呈现出较好的1 Hz方波波形。这说明本文方法能够有效地提供动态加载所需的转矩。三个阶段中,加载电机电磁转矩的波形不相等。这是由于多余力导致的。
图7中,在呈现1 Hz方波曲线的变负载转矩下,最大转速波动为0.440 rad/s,说明所设计的调速系统能够在该种负载特性下稳定地工作。
利用直接转矩控制模式下的异步电机,实现电机控制系统负载转矩和转速方向相同以及方向不同的两种状态动态加载测试,并通过减速机降低直接转矩控制引起的转矩脉动对加载的影响。采用该方法可以方便地完成电机四象限运行所需的转矩特性加载测试,可缩短电机四象限运行控制系统的研制周期并提高其控制性能。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|