汽车制动防抱死系统分离路面的控制策略
Antilock braking control algorithm on split-mu road
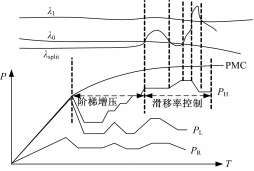
Fig.2 Control diagram of split-mu road
汽车制动防抱死系统分离路面的控制策略 |
|
初亮 |
Antilock braking control algorithm on split-mu road |
| 2考虑滑移率的影响,初次修正后的压差为 3计算车辆横向加速度和纵向加速度因子。制动减速度和侧向加速度会影响车辆的载荷转移,减速度越大要求左右的压力差别越大;侧向加速度越大要求左右的压力差别越大。 同理,可以得到横向加速度因子: 4考虑纵向和侧向加速度的影响,最终修正后的压差值为 5判断是否为分离路面。如果修正后的压差值大于门限值pdiff,并且同时满足滑移率差值大于#cod#x00394; #cod#x003bb; FA ,则认为车辆处于分离路面,如果不能满足上述任一条件,则认为车辆没有处于分离路面。 2 控制策略 对于分离路面的汽车防抱死制动,本文分为两个阶段进行控制。第一阶段以阶梯增压为主 [ 9 ] ,当前轴处于低附着路面的车轮有抱死倾向时,进入ABS控制,而同轴的高附着路面的车轮则进入保压、减压、阶梯增压或者减压、保压、阶梯增压的控制过程,前者适用于制动强度相对较小、后者适用于制动强度相对较大的情况。 如图2所示: 图2 分离路面控制示意图 Fig.2 Control diagram of split-mu road |
| |