基于线控转向系统的路面参数估计
Tire-road friction coefficient estimation based on steer-by-wire system
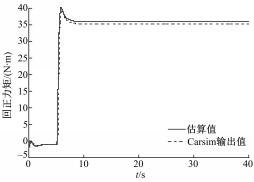
Fig.3 Estimation result of self-aligning torque on step-angle test condition
基于线控转向系统的路面参数估计 |
|
郑宏宇 |
Tire-road friction coefficient estimation based on steer-by-wire system |
| 图3 角阶跃试验回正力矩估计结果 Fig.3 Estimation result of self-aligning torque on step-angle test condition |
| |