





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
混合动力车辆中的加速与制动意图识别
引用本文
王庆年, 王俊, 陈慧勇, 曾小华, 唐先智. 混合动力车辆中的加速与制动意图识别. 2014, 44(2): 281-286[WANG Qing-nian, WANG Jun, CHEN Hui-yong, ZENG Xiao-hua, TANG Xian-zhi. Accelerating and braking intention identification in hybrid vehicle. 吉林大学学报(工学版), 2014, 44(2): 281-286] 
Permissions
Copyright©2014, 吉林大学学报编辑部
版权所有.吉林大学学报编辑部
混合动力车辆中的加速与制动意图识别
王庆年(1952) ,男,教授,博士生导师.研究方向:混合动力汽车关键技术.E-mail:wqn@jlu.cdu.cn
摘要
提出了构建驾驶员意图的模糊控制策略,实现驾驶员在不同紧急程度踩下油门时,提供不同的驱动功率来满足驾驶员的需求。同时在满足安全条件下,结合工况对不同紧急程度踩制动踏板来优化电机能量回收的能力,以实现舒适的驾驶性能和经济的综合油耗。
关键词:
车辆工程; 加速踏板; 制动踏板; 驾驶员意图; 模糊控制
中图分类号:U469.7
文献标志码:A
文章编号:1671-5497(2014)2-281-6
Accelerating and braking intention identification in hybrid vehicle
Abstract
This paper presents a fuzzy control strategy to build the driver's intentions. The driving performance is improved through the fuzzification of two parameters: the accelerator pedal opening and pedal opening rate to revise torque requirement. At the same time, the efficiency of energy recovery system is increased through brake pedal multi-parameter fuzzification.
Keyword:
vehicle engineering; accelerator pedal; brake pedal; driver's intention; fuzzy control
引言
传统车辆设计时,对油门踏板与制动踏板信号均采用开度值作为驾驶员控制车辆加速与制动的唯一指标,实际上驾驶员紧急或缓慢踩下油门或踏板时,对于车辆运行时的驱动功率与制动功率需求是不一样的。即便采用对油门踏板开度变化率修正,也难以达到需求的性能,因为发动机转矩的瞬态响应很难满足需求,而且仅靠发动机来修正会恶化发动机的稳态工作点[ 1]。但作为多动力源的混合动力车辆,可以依靠电动机的快速瞬态响应特性来满足驱动与制动时的转矩需求。
本文通过对加速踏板的开度与开度变化率进行两参数模糊化解析,来修正需求的驱动功率,实现更舒适的驾驶特性[ 2]。同时结合车辆的运行状态对制动踏板进行多参数模糊化控制,实现在满足制动性能的条件下,提高电机能量回收率。
1 加速意图解析
加速踏板对于车辆需求的功率有着直接的反映,但仅仅靠加速踏板的开度值是不能够实现驾驶员对加速特性的需求的,为此本文提出对加速踏板的智能解析实现对开度以及变化率综合分析,同时对求解值结合本系统进行匹配修正,实现更佳的加速性能[ 3]。
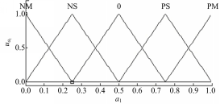
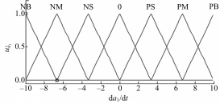
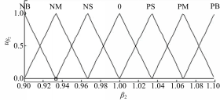
加速意图分别采用加速踏板开度与加速踏板开度变化率构建模糊规则。如图1~图3所示:
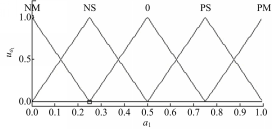 | 图1 加速踏板开度的隶属度函数Fig.1 Membership functions of accelerator pedal opening |
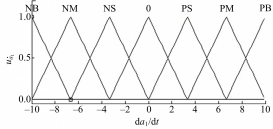 | 图2 加速踏板开度变化率的隶属度函数Fig.2 Membership functions of accelerator pedal opening rate |
 | 图3 加速踏板开度修正因子的隶属度函数Fig.3 Membership functions of accelerator pedal correction factor |
把油门踏板开度的论域[0,1]分别对应于模糊子集 E( a1)=[NM,NS,0,PS,PM],油门踏板开度变化率的论域[-10,10]分别对应于模糊子集 E(d a1/d t)=[NB,NM,NS,0,PS,PM,PB],油门踏板开度修正系数 
其中, 



| 表1 加速踏板开度与加速踏板开度变化率两输入模糊控制规则量 Table 1 Fuzzy control rules of accelerator pedal opening and accelerator pedal opening rate |
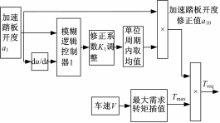
图4中需求转矩计算通过考虑加速踏板开度及变化率的模糊控制规则修正需求转矩,使得需求转矩能够根据加速踏板踩下的紧急程度进行准确计算。
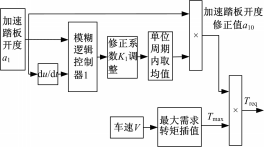 | 图4 驾驶员加速意图识别后的需求扭矩计算Fig.4 Torque requirements with driving intention identification |
模糊控制器对应的不同系统的加速踏板修正系数 
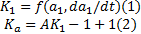
式中: Ka 为调整后的修正系数;A为放大系数。
式中: 

式中: 
式中: 


式中: 
图5为在350~410 s内的采样周期分别为0.5、1、2 s时修正系数在单位周期内的均值。很明显,当识别周期取得较小时,如 T=0.5 s时,修正因子经常会有尖点和毛刺产生,对应到系统就会使得修正后的油门踏板输出值有一定的波动。为了协调踏板变化的灵敏度与车辆加速时冲击度,可以调整识别周期与放大系数进行匹配,达到加速踏板解析最优。
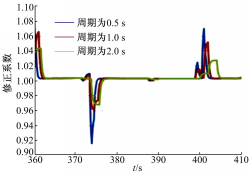 | 图5 不同识别周期的修正系数对比图Fig.5 Correction coefficients contrast diagram at different periods |
2 制动意图解析
制动踏板在混合动力车辆中起着尤为重要的作用,与传统车辆相比,其加入了制动能量回收功能。为降低车辆的能耗,混合动力被广泛研究,其制动回收目的就是使得控制过程中在满足制动性能的条件下,尽可能多地回收能量[ 6, 7]。本文基于驾驶环境与驾驶员操作多参数模糊化控制来获取最优制动能量回馈的修正因子。
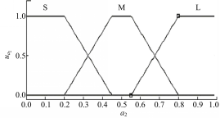
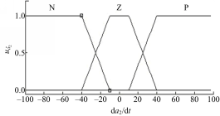
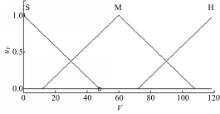
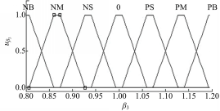
制动意图分别采用制动踏板开度与制动踏板开度变化率及车速构建模糊规则。如图6~图9所示:
 | 图6 制动踏板开度的隶属度函数Fig.6 Membership functions of braking pedal opening |
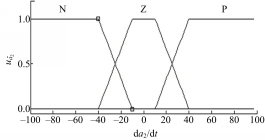 | 图7 制动踏板开度变化率的隶属度函数Fig.7 Membership functions of braking pedal opening rate |
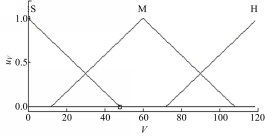 | 图8 车速的隶属度函数Fig.8 Membership functions of velocity |
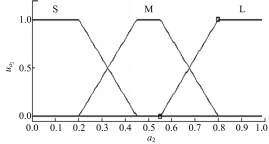
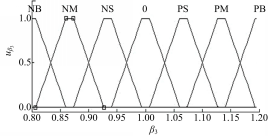 | 图9 能量回收修正因子的隶属度函数Fig.9 Membership functions of energy recycle correction factor |
把制动踏板开度的论域[0,1]对应于模糊子集 E( a2)=[S,M,L];制动踏板开度变化率的论域[-100,100]对应于模糊子集 E(d a2/d t)=[N,Z,P];车速的论域[0,120]对应于模糊子集 E( V)=[S,M,H];制动踏板开度修正系数 
电机的能量回收率与驾驶员的制动意图以及车辆的运行状态息息相关。车速较高,而制动较为紧急时,代表紧急状态需要迅速将车辆制动,为此安全制动作为首要考虑的因素。车速相对较低且制动缓慢时,车辆需求的制动程度较为轻缓,可以考虑采用以电机能量回收为主、机械制动为辅的控制模式。但在传统的控制策略中,对驾驶员制动意图并不能精确地辨识,为此有人提出采用对制动踏板开度与开度变化率进行制动意图识别[ 8, 9]。
| 表2 制动踏板开度与制动踏板开度变化率、车速多输入模糊控制规则 Table 2 Multiple parameters fuzzy control rules of braking pedal opening,braking pedal opening rate and velocity |
修正后的电机负荷控制信号为

式中: 
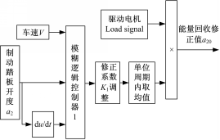
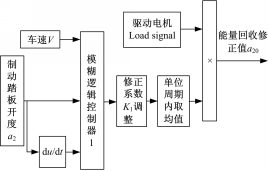
混合动力车辆在制动过程中能够回收制动能量延长车辆的行驶里程,但在回收能量的同时需考虑驾驶员制动的紧急程度进行实时调整来保证制动过程的安全性,图10通过综合考虑制动踏板开度、变化率及车速多种因素进行调整电机制动回收比例来优化制动回收能力。
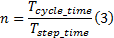
3 混合动力系统结构
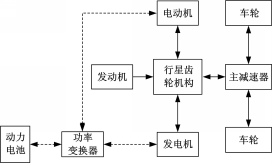
如图11所示,该系统中发动机与行星架固定连接;电动机与齿圈固定连接,然后与主减速器连接;太阳轮与发电机固定连接。发电机在系统中主要起调速作用,使得发动机尽可能工作在高效区间。根据行星齿轮的运动原理其发动机、发电机、电动机的转速满足杠杆原理[ 10]:

式中: 



式中: 


若忽略稳态运行时的能量损耗,则行星架,齿圈和太阳轮之间的转矩存在如下关系:

式中: 


当处于驱动模式下时:

式中: 

当处于制动模式下时:

式中: 

当动力电池 

式中: 




当动力电池 

整车基本参数如下:整备质量为1845 kg;发动机功率/峰值扭矩为63 kW/130 Nm;发电机功率为15 kW;电机功率为30 kW;电池电压/容量为308 V/6.5 Ah;行星齿轮传动比为2.6;主减速器传动比为3.905。
4 仿真结果
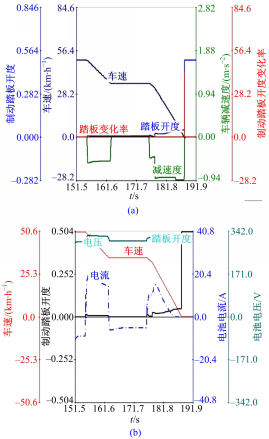
在驾驶员紧急踩下加速踏板时,对于车辆的动力性需求较大,传统对踏板的解析无法对于紧急程度进行精确判断,导致能量管理过程中很难对发动机以及电机优化控制。本文对于驾驶员加速意图清晰识别,通过图12可知,驾驶员较紧急踩下加速踏板时,利用电机快速响应的特性对电机进行驱动控制来补偿发动机的动力不足,可以降低发动机因频繁动态转矩响应而导致的油耗,同时也能较好地满足动力性需求。
制动过程中主要考虑安全性以及电机能量回收率,而这又是一对相互矛盾的因素,协调好两者的关系需要对驾驶员制动意图精确解析,判断出是否允许回收制动过程中的能量。从图13来看,采用模糊控制后的制动协调控制能够达到预期的效果。
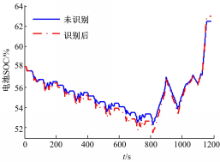
如图14所示:
加入驾驶员驾驶意图识别后,电池SOC波动更大,因为修正后加速踏板响应更快,这一部分的动力主要由驱动电机提供,此时车辆具有更优的驾驶动力性。设定初始电池SOC为0.58,优化后SOC数值为0.629,略高于优化前的0.624,因为对电机负荷率系数的修正,使得回收的能量更多。
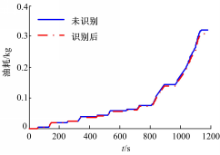
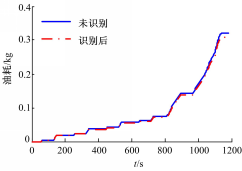
图15为循环工况下油耗对比。从仿真结果可知,加入驾驶员意图模糊控制算法后,发动机的油耗有所降低。特别是在低速、频繁启停的工况下,电机能够吸收更多的能量为车辆需求功率较小时补充动力,使得发动机运行在较稳定的工作区域,从而降低了发动机的油耗。
5 结束语
构建的加速踏板与制动踏板意图解析模型,可实现根据踩下加速踏板的紧急程度实时优化满足驾驶员的动力性需求,提高了驾驶舒适性并减少了发动机的非稳态工作点,同时结合制动踏板制动的紧急程度与车速优化电机能量回收能力,降低了车辆的油耗。
The authors have declared that no competing interests exist.
参考文献
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|