


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
双模式机电复合传动系统综合控制策略
引用本文
郑海亮, 项昌乐, 王伟达, 韩立金, 张东好. 双模式机电复合传动系统综合控制策略. 2014, 44(2): 311-317[ZHENG Hai-liang, XIANG Chang-le, WANG Wei-da, HAN Li-jin, ZHANG Dong-hao. Design and validation of control strategy for Dual-mode Electro-mechanical Transmission. 吉林大学学报(工学版), 2014, 44(2): 311-317] 
Permissions
Copyright©2014, 吉林大学学报编辑部
版权所有.吉林大学学报编辑部
双模式机电复合传动系统综合控制策略
摘要
为了实现双模式机电复合传动系统的能量管理与控制,开展了系统综合控制策略的研究。在分析双模式机电复合传动系统机构特点的基础上,提出了在保证动力性的前提下改善燃油经济性为主要目标的控制策略,实现传动系统工作模式判断与切换以及系统不同能量源间的协调控制。开发了基于dSPACE的双模式机电复合传动控制策略硬件在环仿真平台,对该控制策略下的车辆性能进行了评价。仿真结果表明,开发的双模式机电复合传动系统控制策略实现了整车系统的能量管理与控制,优化了发动机的工作点,改善了车辆的燃油经济性。
关键词:
车辆工程; 双模式; 机电复合传动; 控制策略; 硬件在环仿真
中图分类号:U469.72
文献标志码:A
文章编号:1671-5497(2014)2-311-7
Design and validation of control strategy for Dual-mode Electro-mechanical Transmission
Abstract
In order to achieve the energy management and control of the dual-mode electro-mechanical transmission system, a comprehensive control strategy is studied. After the analysis of the structural characteristics of the dual-mode electro-mechanical transmission system, a control strategy for improving the fuel economy is proposed. This strategy can realize the operating mode judgment of transmission system and the coordinated control between the different energy sources. Based on dSPACE system, the hardware-in-loop simulation platform is developed to evaluate the control strategy of the dual-mode electro-mechanical transmission. The simulation results indicate that the proposed control strategy can realize the energy management and control of hybrid vehicles, the optimization of the engine operating point and the improvement of the vehicle fuel economy.
Keyword:
vehicle engineering; dual-mode; electro-mechanical transmission; control strategy; hardware-in-the-loop simulation
0 引 言
节能与环保成为当今世界的主题,对于汽车产业,在电池技术没有取得重大突破的情况下,以成熟技术为基础开发的混合动力汽车得到日益广泛的研究与应用[ 1, 2]。车辆机电复合传动系统是混联式混合动力的一种形式。机电复合传动系统利用行星机构将两个电机集成到传动系统当中,在传动系统输入转速基本不变的情况下,改变两个电机的转速状态,使得传动系统输出转速连续变化,因此又被称为电力机械无级变速器(EVT)[ 3, 4, 5]。EVT系统解耦了发动机与车轮间的转速关系,满足车辆功率需求的前提下,可以更加灵活地选择发动机的工作点,优化系统的燃油经济性。丰田公司的Prius单模式混合动力系统是机电复合传动系统的最突出代表,车辆上市以来获得了较大的成功[ 3]。但是由于EVT系统内部功率循环的存在,导致单模式混合动力系统在高速情况下,系统的传动效率较低。为了减少系统功率循环,考虑在车辆速度较高时,增加新的EVT模式,称为双模式机电复合传动系统[ 4, 5]。与单模式相比双模式系统增加了行星排和操纵元件,可以获得更宽的调速范围,全速范围内改善系统效率,并且可以降低电机的功率要求,满足大功率或非道路车辆的驱动行驶要求[ 6]。通用公司推出的双模式混合动力系统在SUV和公交车上得到了成功应用,具有良好的应用前景[ 7]。针对混合动力车辆综合控制策略的研究是国内外研究的热点,主要集中在并联和串联结构领域,对于双模式混合动力系统,国内外研究者对其控制策略研究、分析较多,但一般不涉及具体的技术细节,不能用于实际的车辆控制[ 8, 9, 10]。
本文在研究的双模式机电复合传动系统方案设计与特性分析的基础上,针对研究方案特性,提出在保证动力性的前提下,改善燃油经济性主要目标的综合控制策略,协调系统各部件工作,实现整车系统的能量管理与控制。开发了基于dSPACE的双模式机电复合控制策略硬件在环仿真平台,在实际的控制器中,对该综合控制策略下的车辆性能进行了测试评价。
1 双模式机电复合传动系统
1.1 系统结构
本文研究的双模式机电复合传动系统主要用以满足重型车辆驱动大功率、大转矩的需求,系统结构如图1所示:
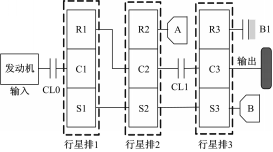 | 图1 双模式机电复合传动系统结构Fig.1 Configuration of dual-mode electro-mechanical Transmission |
系统由电机A、电机B、三个行星排、离合器CL0、离合器CL1、制动器B1、动力输入及输出几部分组成。发动机在输入端通过离合器CL0与C1相连,电机A与R2相连,电机B与S1、S2、S3相连,C2与R1相连并通过CL1与C3相连,R3与B1相连,C3作为系统的传动输出。R、C、S分别代表行星排的齿圈、行星架和太阳轮。
当离合器CL0接合时,通过离合器CL1和制动器B1的分别接合,实现两个不同混合驱动模式的控制,如表1所示:
| 表1 双模式系统操纵关系 Table 1 Manipulate relationship of dual-mode system |
1.2 转速转矩特性分析
= 
= 
= 
= 
通过行星排转速关系和转矩分析,可以得到电机A、B的转速转矩与输入输出的转速转矩的关系式。根据不同EVT模式下的转速转矩关系制定控制策略,通过对输入转速和电机A、B转矩的控制,可以实现系统的稳定运行。
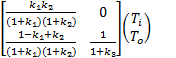
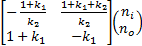
EVT1模式:
 | (1) |
 | (2) |
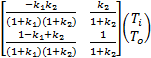
EVT2模式:
 | (3) |
 | (4) |
式中:ki为各行星排特性参数,是齿圈齿数与太阳轮齿数的比值,i=1,2,3;n A、T A分别为电机A的转速和转矩;n B、T B分别为电机B的转速和转矩;n i、T i分别为输入的转速和转矩(发动机);n o、T o分别为输出的转速和转矩。
2 综合控制策略
2.1 综合控制策略结构
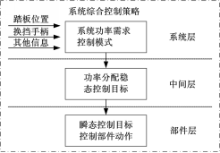
双模式机电复合传动系统包括多个控制子系统,各子系统协调配合工作,才能实现机电复合传动系统的功能以及动力性、经济性等指标。双模式机电复合传动综合控制器需要实现多能源的能量管理与各子系统控制,同时综合控制器还要控制相关部件协调工作,快速平稳地实现系统不同工作模式的切换,保证系统的控制品质。为了简化控制功能复杂性,保证双模式机电复合传动系统综合控制策略逻辑明确、运行高效,本文采用分层结构设计了综合控制策略,如图2所示:
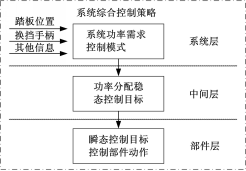 | 图2 控制策略分层结构图Fig.2 Control strategy hierarchical block diagram |
系统层:根据油门(或制动)踏板位置、换挡手柄信号及其他相关信息判断驾驶员意图,确定驱动(或制动)功率需求,按照系统模式设定与切换策略,决定满足需求的机电复合传动系统控制模式。
中间层:根据系统相关信息以及相应的控制目标,将系统的功率需求在各功率部件间进行功率分配,确定各部件在当前系统功率需求下的稳态控制目标。
部件层:根据各部件(或操作元件)的稳态控制目标,按照一定逻辑计算当前时刻的瞬时控制目标,然后将控制指令通过CAN总线或驱动电路发送给相应部件,保证部件快速平稳地实现预期控制目标。
2.2 系统工作模式
基于系统方案和转速转矩特性分析,可以确定双模式机电复合传动系统的工作模式主要有以下几种:纯电驱动模式、发动机启动模式、混合驱动EVT1模式、混合驱动EVT2模式以及制动回收模式等,各个模式下各部件的工作情况如表2所示:
| 表2 双模式机电复合传动系统工作模式 Table 2 Partition of dual-mode electro-mechanical transmission |
车辆运行中,双模式机电复合传动系统的工作模式主要由当前车辆需求功率、电池的荷电状态以及行驶车速等条件决定。各模式具体如下:
(1)纯电驱动模式:当车辆需求功率大于0且小于电机B的最大驱动功率时,可由电机B单独驱动。考虑研究车辆的工作特性,本文控制策略中纯电驱动模式主要用于车辆的倒车行驶。
(2)发动机启动模式:当发动机转速小于怠速时,车辆进入混合驱动模式前,需进入发动机启动模式,在电机A和电机B的协同工作下,将发动机带到相应的启动转速,启动发动机。
(3)混合驱动模式:分为EVT1和EVT2两种。车辆行驶过程中,通过调节电机A和电机B的工作状态,保证发动机工作在最佳燃油经济区。考虑传动系统效率,不同EVT模式间的切换判断主要取决于车辆行驶速度。
(4)制动能量回收模式:当驾驶员的制动需求较小且电池的荷电状态(State of charge,SOC)小于充电上限值时,车辆进入制动回收模式,通过电机A和电机B回收制动能量,其余情况车辆采用单独机械制动。
2.3 系统能量管理策略
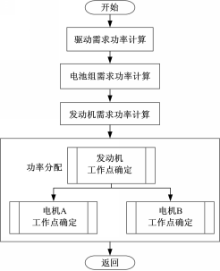
在满足驾驶员动力性需求的基础上,系统能量管理策略的主要目的在于通过调整系统各部件的工作状态保持发动机工作在最佳燃油经济区,同时保持电池组的荷电状态SOC在规定的范围之内,系统能量管理的流程如图3所示:
 | 图3 系统能量管理流程Fig.3 System energy management process |
车辆运行过程中,系统的功率需求由加速或制动踏板的行程决定,系统需求功率与踏板行程的关系为P req=P ratα(5)式中:P req为系统需求功率;P rat为混合动力系统额定功率(或最大制动功率),加速踏板行程对应系统额定功率(制动踏板对应最大制动功率);α为踏板行程,以占总行程的百分比表示,加速踏板为正,制动踏板为负。
混合驱动模式下,系统的功率需求由电池和发动机共同提供。电池的需求功率由电池的荷电状态SOC和系统的功率需求共同确定。在保证电池电量平衡的条件下,电池SOC决定电池的功率能力,系统的功率需求决定电池的功率系数,电池的需求功率P bat为P bat=P tβ(6)式中:P t为电池功率能力;β为电池功率系数。
当电池SOC偏低时,电池功率能力为正,电池具有充电功率需求,系统需求功率较大时,电池功率系数会相应减小,以保证系统的功率需求,而系统需求功率较小时,电池功率系数会相应增大以确保电池电量的回复。当电池SOC偏高时,电池功率能力为负,电池具有放电功率需求,系统功率需求较大时,电池功率系数增大;系统功率需求较小时,电池功率系数减小,以确保电池的正常放电。
系统的需求功率和电池需求功率确定后,发动机需求功率P eng可以由下式确定:
P eng=P req+P bat(7)
确定发动机需求功率后,发动机工作点(转速、转矩)根据发动机最优工作曲线确定,发动机最优工作曲线根据发动机万有特性中的最低燃油消耗区域确定。当系统需求功率较大时,发动机工作在最优工作曲线上不足以满足系统的需求功率,调整发动机的工作点使其工作在外特性上以确保车辆的动力性。
发动机工作点确定后,在发动机采用转速控制、电机A和电机B采用转矩控制的模式下,根据系统不同EVT模式下的转速转矩特性(式(1)~(4))以及系统不同部件的固有约束关系,即可确定电机A和电机B的工作点(转速和转矩),从而控制发动机工作在最低燃油消耗区。
2.4 EVT模式切换控制
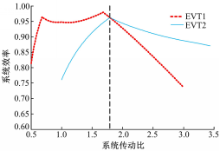
车辆处于混合驱动模式时,随着车辆行驶工况的变化,为了保证机电复合传动系统输出转速的连续变化以及系统的传动效率,需要选择相应的EVT模式,保证系统的稳定高效运行。图4为考虑双模式系统机械损失情况下的传动系统效率曲线。当发动机的工作转速确定以后,根据机电复合传动系统的输出转速可以确定系统的传动比,即可获得当前情况下的系统效率。
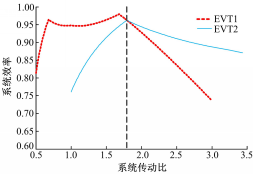 | 图4 双模式机构效率变化规律Fig.4 Transmission efficiency of dual mode EMT |
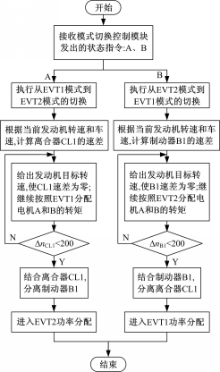
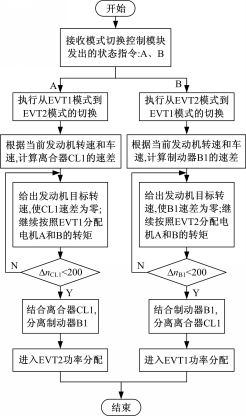 | 图5 EVT模式切换过程流程图Fig.5 EVT mode change process |
系统模式切换控制模块,综合考虑系统效率、车辆行驶速度以及电池SOC等信息进行判断,选取当前状态适合的EVT模式,系统EVT模式需要转换时,发出状态转换指令,EVT模式的切换过程如图5所示。为了降低模式切换过程的冲击保护系统部件,通过调速算法调节系统各元件的转速,减小接合离合器或制动器的转速差,快速平稳地实现EVT模式间的切换。
3 硬件在环仿真
3.1 硬件在环仿真平台
硬件在环仿真平台由驾驶员意图模块、综合控制器ECU、dSPACE实时仿真系统以及双模式机电复合系统动力学模型组成,其结构如图6所示:
 | 图6 硬件在环仿真平台结构示意图Fig.6 Schematic diagram of hardware-in-the-loop simulation platfor |
驾驶员控制信号通过A/D采集模块输入到含有系统控制策略的综合控制器中,系统仿真模型被转换成C代码后下载到dSPACE中,dSPACE系统通过实时仿真接口模块的CAN通讯接口实现与综合控制器之间的信息交互。实时仿真界面能够动态实时地显示仿真过程中系统的关键参数和各个部件的运行状态,形成面向驾驶员的系统状态反馈。
3.2 硬件在环仿真测试
基于硬件在环仿真平台,对双模式机电复合传动控制策略进行了性能验证,同时对综合控制器软硬件系统进行了测试。普通驾驶工况仿真结果如图7所示。其中,对加速/制动踏板行程进行了统一处理,范围为[-100%,100%],正值为加速踏板行程,负值为制动踏板行程。系统工作模式编号:0为驻车模式;2为纯电驱动模式;3为发动机启动模式;4为混合驱动模式;7为制动模式。混合驱动EVT模式编号:2为EVT1模式;3为EVT2模式。
在仿真的驾驶工况下,根据反复变化的踏板行程反映的驾驶员的加速/制动意图,双模式机电复合传动系统驱动车辆行驶在不同的车速, 如图7(a)(b)所示:
 | 图7 硬件在环仿真结果Fig.7 Hardware-in-the-loop simulation results |
发动机的工作状态如图7(c)(h)所示。根据系统功率需求和输出转速要求,发动机一般工作在900~2000 r/min范围内。为了达到节油的目的,一般情况下发动机尽量保持在最佳燃油经济曲线附近工作,当系统有较大的功率需求时,调节发动机工作在外特性附近,实现了机电复合传动能量管理策略在保证动力性的前提下,提高燃油经济性的功能,发动机工作点在万有特性上的分布如图7(h)所示。电机A和电机B的工作状态如图7(e)(f)所示。通过电机A、B的协调控制实现系统输出转速变化时,发动机输入转速的保持。电池SOC变化如图7(d)所示。当踏板行程为正且行程较小时,车辆的总功率需求较小,发动机作为主要的能量源输出动力。由于此时电池SOC较高(0.7左右),电机A和电机B间电功率平衡,保持电池电量的恒定。当踏板行程为负且行程较小时,系统工作在制动回收模式,电机A和电机B均工作在发电状态,回收制动能量,电池SOC升高。双模式机电复合传动系统的工作模式如图7(g)所示。仿真开始时,系统模式进入发动机启动模式反拖启动发动机,然后车辆进入混合驱动模式,并随着传动速比的变化在不同的EVT模式间切换,保证车辆的正常行驶。
4 结 论
(1)结合双模式机电复合传动系统的结构特点,提出了在保证车辆动力性前提下,改善系统燃油经济性为主要目标的控制策略。
(2)采用真实的综合控制器,通过数学模型在dSPACE中实时运行模拟实际被控对象与外界环境,构建了基于CAN总线通讯的双模式机电复合传动系统控制策略硬件在环仿真平台。
(3)硬件在环仿真结果表明,开发的双模式机电复合传动系统控制策略实现了整车系统的能量管理与控制,优化了发动机的工作点,改善了车辆的燃油经济性。
The authors have declared that no competing interests exist.
参考文献
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|