







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
双电机混合动力系统FlexRay网络开发
[田丽媛 , 王庆年, 王鹏宇]
, 王庆年, 王鹏宇]
, 王庆年, 王鹏宇]
|
|


田丽媛(1986),女,博士研究生.研究方向:节能与新能源汽车.E-mail:tianliyuan@foxmail.com
为了提高双电机混合动力系统的电磁兼容性,在对其多动力源进行电磁干扰分析的基础上,基于V模式开发流程构建了系统的FlexRay控制网络。采用信号分割与打包相结合的优化方式设置静态段时槽长度,并在系统台架的基础上通过CANoe、FlexRay网络接口与真实节点等设备进行了半实物仿真。仿真结果表明:对于混合动力汽车这种电磁干扰严重而对实时性要求较高的系统,FlexRay总线比CAN总线具有更多优势。
In order to improve the electromagnetic compatibility of the dual-motor hybrid power-train system, the electromagnetic interference of the system power source was analyzed; then the FlexRay control network was developed base on V-mode development process. The optimization method, which combines signal segmentation and packaging, was employed in setting the length of the static segment slot. Semi-physical simulation was carried out on a platform with CANoe, FlexRay network interface and real nodes. Results show that, for hybrid vehicle, such systems with severe electromagnetic interference and high real-time requirement, FlexRay bus has more advantages than CAN bus.
混合动力汽车的电磁兼容(Electromagnetic Compatibility,EMC)问题一直是整车开发过程中的关键问题,由于混合动力汽车与传统汽车在结构上存在差异,混合动力汽车的动力总成增加了电动机,并增加了动力电池等作为能源输入,这都不可避免地增加了电磁干扰源。除此之外,DC/AC逆变器以及DC/DC转换器等大功率元器件也会带来严重的电磁干扰[ 1],不同频率的电磁干扰会直接改变车载网络中传输的信号,从而影响电气系统之间控制功能的安全可靠性。
本文采取新型车载通信网络FlexRay作为系统的控制信号传输总线。FlexRay可为汽车提供更高的数据传输速率,而其基于时间触发的通信机制则保证了报文传输的确定性。FlexRay通过节点硬件设计中的分裂终端和共模电感两种方式来屏蔽电磁干扰并实现静电保护功能[ 2],因而在物理传输层和数据传输方式上降低了车载网络的电磁敏感度。
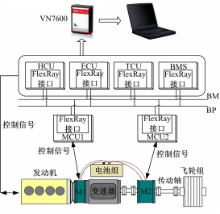
本文所研究的双电机混合动力系统是一种双电机与变速器集成的深混Plug-In混合动力系统,系统的动力源有3个:发动机、I轴电机M1、II轴电机M2,前端电机的转子与变速器的输入轴(I轴)相连,电机定子固定在变速器壳体上,后端电机通过扭矩合成装置与变速器输出轴(II轴)相连。系统结构示意图如图1所示。
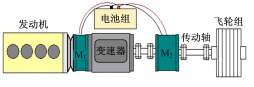 | 图1 双电机混合动力系统结构图Fig.1 Dual-motor hybrid system structure |
双电机混合动力系统通过FlexRay总线控制三个动力源与变速器之间的工作,通过整车线束将整车控制器HCU、发动机控制器ECU、I轴电机控制器MCU、II轴电机控制器MCU、ATL电池控制器BMS、AMT控制器TCU组成总线型网络。各总成状态信息按照FlexRay通信协议封装成报文,通过FlexRay总线完成报文传输,经过整车控制策略控制算法的实时运算,输出控制参数,协调控制发动机、I轴电机、II轴电机、电池及变速器的工作,实现混合动力汽车的各种工作模式及各项功能。
在传统内燃机汽车中,电磁干扰主要来自于发动机高压点火系统以及雨刷电机等弱电设备,双电机混合动力系统增加了动力电池、DC/DC转换器、DC/AC逆变器等大量高压元器件[ 3],并采用了3个动力源,这使电磁干扰的来源更加复杂。
本系统由发动机,变速器,与变速器集成的I轴电机,II轴电机,控制器等组成。该系统与普通的串、并联混合动力系统相比,额外增加了一部电机,这就比其他单电机混合动力总成增加了一个强电磁干扰源。通过控制系统和能量管理系统使这些动力装置协调工作,以实现最佳的能量分配,而各个执行机构则通过车载网络连接,控制信号以报文的形式进行传播。在这种强电磁干扰环境下,对车载网络的电磁兼容性有较高要求,一旦干扰信号影响到车载网络的电子控制装置和时钟频率,会使网络通信中断,严重时导致动力系统失效[ 1, 3]。
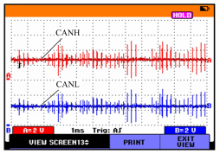
目前多数混合动力汽车上仍采用与传统车相同的车载总线CAN(Controller area network)作为主要的控制信号传输网络,CAN总线在混合动力汽车这种强电磁干扰环境下受到较大的影响,经常发生通信错误甚至网络传输失败的现象。图2为CAN总线在电机大功率输出状态下CANH和CANL信号的绝对电平波形,可以看出CAN通信受到较大干扰,如果这些干扰信号与正常报文收发信号相叠加则会改变数据内容,导致错误帧,由于CAN报文的收发机制会使节点重新发送CRC(Cyclic redundancy check)校验错误的报文,就会导致总线负载率的增加,当节点数量到达一定数量时就会影响总线的正常通信。
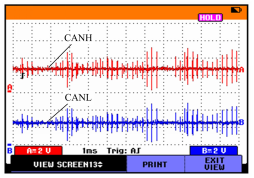 | 图2 CAN通信在电磁干扰下的绝对电平波形Fig.2 Waveform of CAN in electromagnetic interference |
FlexRay在物理传输介质和硬件电路中的屏蔽设计以及FlexRay的确定性报文传输方式使FlexRay具有更强的电磁兼容性,所以本文采用FlexRay总线作为控制系统的传输网络,以求尽量减少混合动力汽车环境下电磁兼容问题导致的影响。
FlexRay作为一种新型通信标准,可为下一代的车内控制系统提供所需的传输带宽和可靠性,其最大传输带宽(10 Mb/s)远高于CAN网络的最高传输带宽(1 Mb/s)。而且FlexRay两个信道上的总数据速率可达20 Mb/s,在应用车载网络中可达CAN的20倍之多[ 4]。FlexRay还能提供很多CAN网络所不具有的可靠性特点,其基于时间触发的通信机制保证了报文传输的确定性;FlexRay具备的冗余通信能力可实现通过硬件完全复制网络配置,并进行进度监测,FlexRay还可以利用双信道系统进行冗余网络传输数据[ 5],从而提高系统的可靠性。
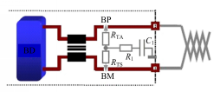
FlexRay在物理层采用屏蔽双绞线和光纤作为传输介质,并在硬件接口电路上通过分裂终端和共模电感来屏蔽电磁干扰以及实现静电保护的功能。图3为分裂终端和共模电感的硬件连接方式,经实验验证,当节点的硬件同时采用分裂终端和共模电感时,能够对电磁干扰起到一定的屏蔽作用。
 | 图3 分裂终端和共模电感硬件连接图Fig.3 Connection of split terminal and common mode choke |
FlexRay的数据链路层实现通过协议提供的时间触发机制,这种确定性的报文传输方式可以改善CAN网络在混合动力汽车中受到电磁干扰时因错误报文的无限制重发而导致的整个网络拥塞现象。此外,FlexRay完备的错误处理机制可以保证当数据出错时不会出现如CAN那样的连续重发现象,而是由错误处理模块根据错误类型进行相应的处理。根据错误消息的类型,调用相应的错误处理函数,从而避免了总线负载率因错误报文过多而大幅升高的问题。
FlexRay系统的开发依据V模式,开发流程可分为两个层次:网络级和电子控制单元(Electronic control unit,ECU)级,具体如图4所示。
 | 图4 V模式网络开发流程图Fig.4 Flow chart of network development in V mode |
首先分析双电机混合动力系统的性能要求,根据系统的控制需求完成分布式FlexRay总线的网络规范,并设计通信调度表。相关工作主要包括:通过网络设计软件Network Designer FlexRay定义通信系统中的网络节点,根据FlexRay通信协议规范中参数之间的计算公式设定通信网络相应的通信集群参数,从而建立仿真网络的数据库[ 6]。在完成了FlexRay网络架构设计后,通过仿真软件CANoe.FlexRay进行网络节点的仿真验证并分析网络性能。经过仿真验证后,完成单个硬件节点ECU的开发和验证,即根据FlexRay通信调度表实现带有FlexRay接口的ECU软、硬件。其中,ECU的软件实现主要包括开发控制算法和通信协议栈代码,并将FlexRay网络在台架及实车中进行集成和全面的功能测试、通信规范测试和物理层测试。
在设计FlexRay网络的初期,需要分析双电机混合动力系统控制网络的功能需求,设计其网络结构及参数。系统的控制网络为由整车控制器HCU、发动机控制器ECU,I轴电机控制器MCU1、II轴电机控制器MCU2,ATL电池控制器BMS,AMT控制器TCU六个节点组成的总线型网络。网络的拓扑结构如图5所示。
 | 图5 控制网络拓扑图Fig.5 Control network topology |
3.2.1 网络参数定义
FlexRay的通信周期由静态段、动态段、符号窗口和总线空闲时间组成,由于混合动力汽车的工作环境中存在较严重的电磁干扰和其他不确定性因素,因此本系统主要在通过事件触发的静态段传输报文。在静态段中,报文被分配在时槽号与自己ID相同的静态时槽中发送,即在一个时槽中只能发送一条报文,在网络节点数目已知的情况下,静态时槽的长度决定了静态段的长度[ 7],继而会影响通信周期的长度和报文的发送时间。因此,静态段时槽长度的合理设置对系统的实时性具有重要的影响。
在FlexRay协议中,静态段时槽长度由协议参数gdStaticSlot决定,其计算公式为[ 5]:
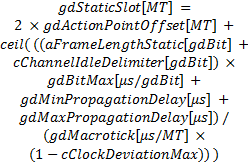 | (1) |
根据网络中各项参数,带入式(1)中可得到gdStaticSlot值为8(下文中若无说明,则计量单位均为MT)。
在通常情况下,为了使报文能够在所分配的时槽内完整地发送,静态时槽的长度一般由消息长度最大的报文来决定[ 5]。以MCU1节点中发出的6条报文为例,每条报文中各封装了多个信号,报文长度分别为: 





 | 图6 时槽长度为6时报文的分配情况Fig.6 Packet distribution when gdStaticSlot=6 |
可见,当静态段时槽长度设置为6时,在m1,m2,m4,m6的发送时槽内均出现较长的空闲时间,这样当发送长度较短的报文时会降低总线利用率,从而降低网络的实时性。
一种优化方法是将较长的报文进行分割,即把一条较长报文中的信号封装成多条较短的报文进行发送,同时适当减小静态段时槽的长度,提高时槽的利用率。
图7示出了将m3,m4,m5分割成长度为2的报文,在长度为2的静态时槽内进行发送的情况,其中m3,1为m3分割后的第1个部分。此时周期长度T cycle的值降为22,同时减少了总线空闲时间。
 | 图7 时槽长度为2时报文的分配情况Fig.7 Packet distribution when gdStaticSlot=2 |
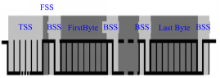
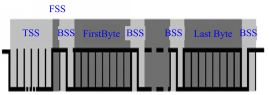
另一方面,由于负载帧在发送前需要先经过如图8所示的位编码过程添加协议负载。过多的报文数量会增加大量的附加成分,继而大大降低网络带宽的有效使用率[ 8]。因此报文分割数量不宜过多,时槽长度也不宜过小。
 | 图8 静态帧编码规则Fig.8 Static frame encoding rules |
考虑到上述情况,可以采取将分割后的信号再连同其他信号封装在同一条报文中进行发送的方式,经这种方法处理后的报文发送情况如图9所示。
 | 图9 时槽长度为4时报文分配情况Fig.9 Packet distribution when gdStaticSlot=4 |
图9中,将m1,m2中的信号封装在一条报文中,m3中的信号分割后与m5分割后的部分封装为一个报文进行发送,这样既减少了总线空闲时间,又减少了报文数量,最终得到 gdStaticSlot=4, Tcycle=24。
确定了静态段时槽长度后,就可以根据协议中对各个网络参数的计算公式结合FlexRay设计工具DaVinci Network Designer FlexRay来定义网络参数。将FlexRay通信速率设置为10 Mb/s,使用单通道Channel A进行通信,通信周期为10 ms。在设置网络参数时,要同时兼顾网络对性能的要求和FlexRay协议中对通信集群协议参数之间相互计算关系的规定,DaVinci Network Designer FlexRay可以对各参数的变化进行动态匹配。所得的部分集群相关参数值如表1所示。
| 表1 部分集群相关参数值 Table 1 Part of the cluster parameter values |
作为网络设计的主要结果,经合理生成的FlexRay通信调度表将会极大简化最终的系统集成时的网络架构设计、通信数据配置和错误检测等一系列工作。该通信调度表还可以导出为FIBEX格式的FlexRay网络描述文件,供给其他FlexRay开发工具使用。
3.2.2 网络环境仿真验证
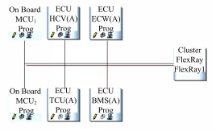
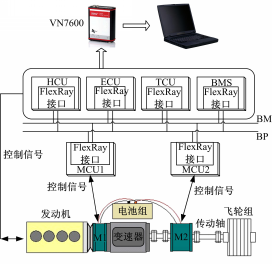
在FlexRay网络规范设计完成后,需要对其进行仿真验证,从而检验网络的可行性。这部分工作可以通过FlexRay接口工具VN7600和建模仿真软件CANoe.FlexRay来完成。调用3.2.1节中建立的FlexRay网络数据库,生成如图10所示的网络环境,其中HCU、ECU、BMS、TCU为软件虚拟节点,MCU1和MCU2为真实节点,分别对应I轴电机控制器和II轴电机控制器。
在建立仿真模型后,就可以在真实节点和虚拟节点之间通过FlexRay网络接口硬件VN7600进行网络通信仿真。通过CANoe中的Trace窗口观察总线的报文收发、总线负载率变化以及错误帧的情况。在进行网络节点的硬件开发前,FlexRay网络模型需经过CANoe.FlexRay的全面仿真验证。在此阶段开发的网络模型在ECU半实物测试阶段也可以发挥重要的系统验证作用。
FlexRay通信模块主要由带FlexRay通信控制器(Communication controller,CC)的主控制器(Host)和总线驱动器(Bus driver,BD)组成,本文采用了飞思卡尔公司的集成了FlexRay通信控制器的16位单片机MC9S12XF512作为主控芯片,FlexRay总线驱动器采用恩智浦公司的TJA1080,FlexRay通信模块的硬件原理图如图11所示。
FlexRay通信模块的软件设计主要包括以下几部分:为系统提供时钟信号的时钟和锁相环设置;设置CPU、各种通用端口和存储器访问的外围设备端口配置;设置通信集群参数和通信缓冲器的FlexRay模块的初始化配置;中断使能与优先级设置等。
FlexRay通信的整体流程是:首先根据外部晶振的时钟频率和FlexRay内部的锁相环电路设置系统的时钟频率,然后对包括CPU、XGATE、存储器接口和I/O接口在内的外围设备进行初始化设置。在完成了中断向量表的初始化设置后,需要对FlexRay模块进行初始化设置。上述设置完成后,进入while循环等待中断处理程序,对数据进行发送和接收。
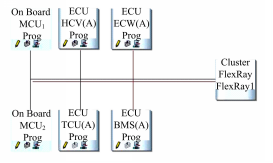
构建双电机混合动力系统半实物仿真平台,MCU1和MCU2分别控制I轴电机和II轴电机,其余4个节点HCU、ECU、TCU和BMS均为CANoe仿真节点,具体如图12所示。
每个节点各自运行包含控制策略的实时内核程序,系统正常运行后方可通过CANoe中的总线检测工具对系统的网络运行情况进行分析,本文主要分析网络可靠性和实时性两项性能。
与CAN总线相比,FlexRay网络在可靠性方面的优势主要体现在容错性和冗余性两方面[ 9],检验FlexRay网络的容错能力主要取决于对报文内容和时间两方面误差的处理,而冗余性则主要体现在双通道冗余和时槽冗余两方面。
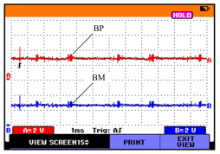
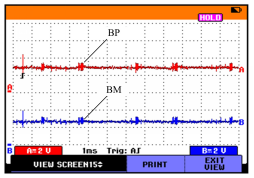
图13为当电机大功率输出情况下产生强电磁干扰时监测到的FlexRay网络BM,BP信号绝对电平波形,可以看出FlexRay总线可以较好地屏蔽来自电机和逆变器的电磁干扰。
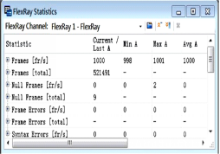
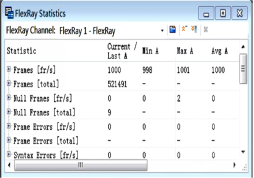
图14为试验过程中得到的FlexRay通信各项的通信参数统计结果,可以看出在对FlexRay总线监控的过程中没有错误帧出现,说明FlexRay通信在强电磁干扰的影响下仍具有较高的可靠性。
从实时性的角度分析,由于FlexRay总线动态段报文收发机制基于事件触发,基本上不会发生较长的等待时间。而静态段基于时间触发,报文传输的时间确定性较强,所以当某些时槽中具有传输时间较短的数据帧时,会造成较长的总线空闲,因此引发总线传输时滞的主要因素是静态段的总线利用率。FlexRay总线利用率为[ 10]:
L= 
式中:ti为第i个静态有效数据帧的传输时间;fi为单个消息传输的频率;n为一个循环周期中静态帧传输总数。
根据前文的静态段时槽长度优化方法,优化前的时槽个数为6,报文长度分别为2,2,6,4,6,2;每个时槽长度为6,得出的总线利用率为:
L1=(2+2+6+4+6+2)/(6×6)=0.61
优化后经分割的报文长度分别为4,4,4,4,4,2;每个时槽长度为4,时槽个数为6,得出的总线利用率为:
L2=(4+4+4+4+4+2)/(4×6)=0.92
通过对比可知L1
采用FlexRay网络作为双电机混合动力系统中的控制网络,旨在解决以往通过CAN总线控制动力源与变速器的协同工作过程中,因电磁干扰而导致的通信错误甚至失效。在此基础上,基于V模式开发流程进行了双电机混合动力系统的FlexRay网络开发。并最终通过试验验证了FlexRay网络能够提高混合动力汽车的电磁兼容性,并能在可靠性和实时性方面满足双电机混合动力系统的需求,证明了对于混合动力汽车这种电磁干扰严重而对实时性要求较高的系统,FlexRay总线比CAN总线具有更多的优势。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|