六自由度机械臂的非奇异快速终端滑模控制
 , 马文光, 赵鹏飞, 卢子广
, 马文光, 赵鹏飞, 卢子广 Non-singular fast terminal sliding mode control method for 6-DOF manipulator
HU Li-kun, MA Wen-guang, ZHAO Peng-fei, LU Zi-guang
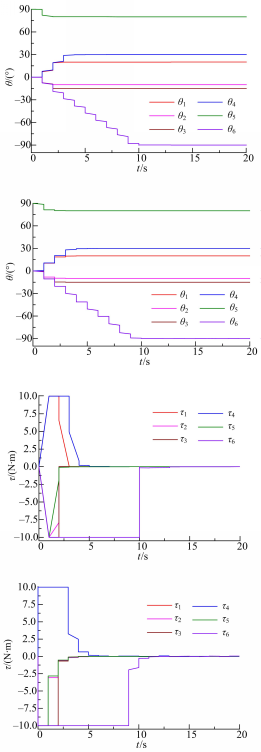
, MA Wen-guang, ZHAO Peng-fei, LU Zi-guang Fig.3 Test curves with load