轮式移动机器人的双强化学习自适应模糊控制
Dual reinforcement learning adaptive fuzzy control of wheeled mobile robot
Fig.11 Simulation results of 8-shaped trajectory tracking
轮式移动机器人的双强化学习自适应模糊控制 |
| 叶锦华, 李迪, 叶峰 |
Dual reinforcement learning adaptive fuzzy control of wheeled mobile robot |
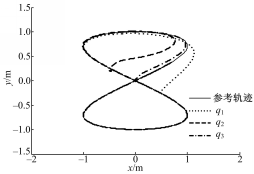
| 图11 8字型轨迹跟踪仿真结果 Fig.11 Simulation results of 8-shaped trajectory tracking |
| |