液压驱动双足机器人运动系统的设计及实现
 , 宁龙霄
, 宁龙霄 Design and implementation of a hydraulic actuated biped robot motion system
WANG Hai-yan, LI Yi-bin, NING Long-xiao
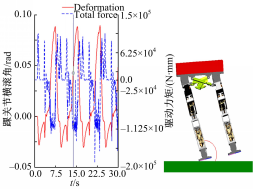
, NING Long-xiao Fig.2 Sketch map for the relationship between the roll angle and the driving torque of the ankle joint