自旋目标运动预测及自主捕获路径规划方法
 , 梁斌, 穆清涛
, 梁斌, 穆清涛Motion prediction and autonomous path planning for spinning target capturing
LIU Hou-de1, 2 , LIANG Bin1, 3 , XU Wen-fu1 , MU Qing-tao1 , YU Jiang-hua1
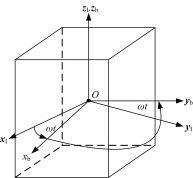
, LIANG Bin, MU Qing-taoFig.1 Simplified model of satellite