








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于SimScape的半主动悬架垂直速度处理电路设计
[李静1  , 王子涵
, 王子涵1 , 秦民2 , 禚帅帅1 , 曹振1 ]
, 王子涵|
|


作者简介:李静(1974-),男,教授,博士生导师.研究方向:汽车地面力学分析与控制.E-mail:liye1129@163.com
为了获取半主动悬架控制中车辆的垂直速度,在分析真实垂直速度信号成分的基础上,提出一种基于垂直加速度计算速度的积分滤波电路和仿真研究方法。本文基于SimScape建立了电气仿真模型,设计了硬件滤波电路,通过离线仿真和硬件在环测试完成了积分滤波电路的开发,并对真实随机路面工况加速度信号进行软硬件处理。实验结果表明,通过软硬件积分滤波系统的信号与离线积分滤波的真实信号保持了较高的一致性,从而验证了积分滤波系统的准确性。
To solve the issue of getting vertical speed for semi-active suspension control, an integral filter circuit and simulation method for vertical speed calculation are put forward based on the analysis of real signal components. The electrical simulation model with SimScape for off-line simulation is constructed. The hardware of the filter circuit for Hardware-In-the-Loop (HIL) test is designed. The integral filter circuit system is exploited through real vehicle acceleration signal. The acceleration signal under the real random road condition is processed through off-line calculation. Experiment result show that the signal obtained from the integral filter circuit system simulation is in high consistent with the signal obtained by HIL test, justifying the integral filter circuit system.
为提高车辆行驶平顺性和安全性,主动悬架和半主动悬架得到了较为广泛的应用[ 1, 2]。目前,产业化的半主动悬架大多应用天棚及其衍生控制算法[ 3],如奥迪A8、宝马7系、保时捷卡宴、大众辉腾、凯迪拉克STS和XLR等。如何准确获取控制所需车辆信号是准确控制的前提,其中,准确计算簧载质量和非簧载质量垂直速度是核心部分。鉴于速度传感器的价格相对昂贵,目前应用较为广泛的是加速度传感器。由于实际信号的复杂性,简单积分往往得不到真实速度信号。构建状态观测器[ 4]或结合滤波电路[ 5]可通过加速度信号得到速度信号。本文结合多种滤波器,基于加速度传感器完成速度信号的处理计算,通过SimScape完成信号处理电路的电气仿真和验证,并设计和测试了与之对应的硬件滤波电路。
为得到真实速度信号,需对真实信号的特征加以分析。通常对人体舒适性产生影响的垂直速度信号频率范围为0.5~10 Hz[ 5],但传感器信号由多种信号组成[ 6],包括不同频率范围和不同幅值的信号。
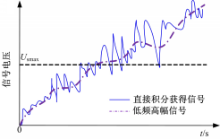
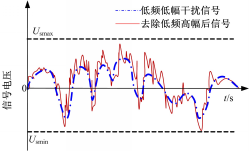
由加速度信号积分获得的信号大致包括如下四部分:噪声信号、低频高幅信号、低频低幅信号和高频低幅信号,其中前三类信号为需要排除的干扰信号,第四类为目标垂直速度信号,如图1~图3所示。
 | 图1 低频高幅信号示意图Fig.1 Signals with low frequency high amplitude |
 | 图2 低频低幅信号示意图Fig.2 Signals with low frequency low amplitude |
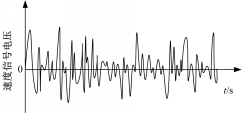 | 图3 真实速度信号示意图Fig.3 Diagram of real velocity signals |
噪声信号在此可视为传感器噪声,该类信号幅值很低,频率很高,需进行前期低通处理。低频高幅信号包括由于安装、温度等原因造成的零漂[ 7],零漂可分为不变零漂和变化零漂,其特征为频率较低、幅值较大。积分后零漂信号不仅影响信号真实性,而且造成信号幅值过大,使电气元件工作电压超过饱和电压。
低频低幅信号区别于低频高幅信号,其频率较低,针对感兴趣频段,该类信号频率为0.1~0.5 Hz,信号幅值较低,但与真实速度信号叠加会影响其方向的判定,如图2和图3所示。图3为真实速度信号,信号的符号与速度符号一致,而叠加低频低幅信号后,如图2所示,对电压符号产生影响,进而影响到速度信号的符号。
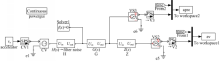
根据前述信号成分的分析,设计低成本信号滤波积分系统,一方面实现加速度信号到速度信号的积分,另一方面实现干扰信号的消除。为节约成本,以基本低通、高通滤波器进行组合,构建基于加速度传感器应用于悬架垂直速度获取的信号处理系统,处理系统框架如图4所示。
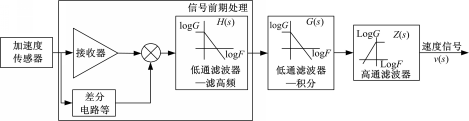 | 图4 信号处理框图Fig.4 Block diagram of signal processing |
加速度传感器采集信号,经信号接收器获取,通过低通滤波器H进行初步滤波,该部分为去除噪声信号,在此认为噪声信号类似白噪声信号,其功率谱近似为0。经过信号前期处理,进行第二次低通滤波,如图4中G,由低通滤波器性质[ 8]可知,对于截止频率以下信号直接通过,对于频率高于截止频率的信号进行积分,进而实现感兴趣频率信号的积分,由加速度信号获得速度信号,且低频干扰信号保持不变,然后通过高通滤波进行滤除,最终得到速度信号。
SimScape是在Simulink的基础上的扩展工具模块[ 9],用于多种不同类型物理系统的建模并进行仿真。SimScape已广泛应用于汽车业、航空业、国防和工业装备制造业,可以支持复杂的不同类型(多学科)物理系统混合、建模和仿真。本文基于SimScape建立了滤波处理电路,整体仿真框图如图5所示。
 | 图5 SimScape仿真平台Fig.5 Simulation platform based on SimScape |
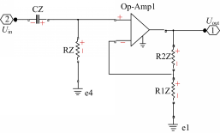
图5仿真平台包括低通滤波器H、G和高通滤波器Z,低通滤波器完成积分和滤除噪声,高通滤波器滤除低频漂移信号。图4所示的低通滤波器和高通滤波器为一阶RC滤波器,仿真模型如图6和图7所示。
图6为RC低通滤波器,传递函数如下所示:
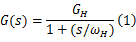
式中:增益 GH =1 + 

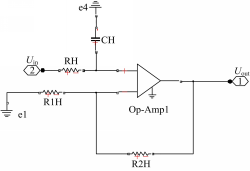 | 图6 SimScape一阶低通滤波器Fig.6 One-order low pass filter with SimScape |
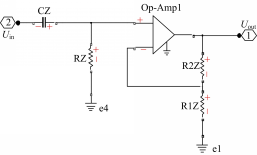 | 图7 SimScape一阶高通滤波器Fig.7 One-order high pass filter with SimScape |
高通滤波器的传递函数为:
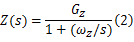
式中:增益 GZ = 

滤波系统传递函数 Y如下所示:

综上,两低通滤波器一方面将感兴趣以外的高频和噪声信号滤除,另一方面将分析频段内信号积分获得速度信号。
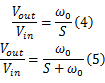
一阶低通滤波器具有如下特点:对于截止频率以下的信号直接通过;对于远高于截止频率的信号进行积分。积分器传递函数如式(4)所示,低通滤波器传递函数如式(5)所示,可见当频率远大于截止频率时,起到积分作用。除上述特点外,一阶滤波器响应时间短,因此通过合理选择截止频率可实现对有用信号的积分滤波。
滤噪滤波器拐点频率相对较高,积分滤波器拐点频率相对较低。高通滤波器将低频干扰信号滤除,包括低频低幅和低频高幅信号,得到符号与速度方向对应的速度电压信号。
为验证信号积分滤波效果,需计算或采集真实速度信号,对信号处理效果进行评价。作者采用离线积分处理方法得到真实加速度信号对应的速度信号。本文基于Simulink滤波工具箱完成真实信号计算。图8所示为基于积分和巴特沃兹[ 10]带通滤波器组成的真实信号计算模块。对于悬架系统,通常对人体舒适性产生影响的真实垂直速度信号频率大约在0.5~10 Hz,以此进行巴特沃兹滤波带通滤波器设置。
 | 图8 信号输入与真实信号计算模块Fig.8 Signal input and real signal calculation model |
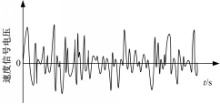
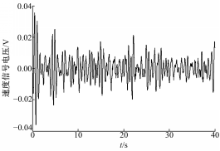
图9和图10分别为一随机路面车身垂直加速度信号和经过离线理想计算方法得到的真实速度信号。
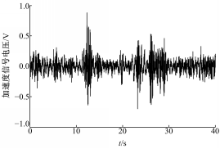
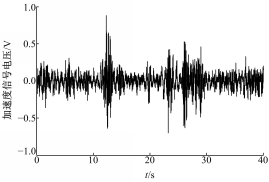 | 图9 车身垂直加速度信号Fig.9 Vertical acceleration of vehicle body |
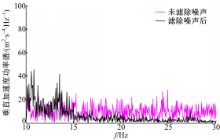
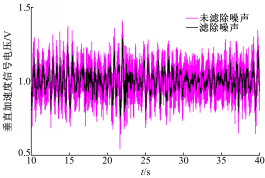
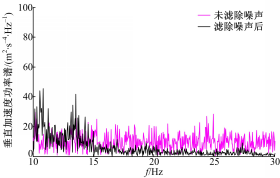
对原始垂直加速度信号加入零漂信号和白噪声信号,以验证滤波和去漂效果。图11为软件仿真中滤除噪声的时域图,由图可知,大大减少了高频噪声信号,图12为滤除噪声后的频域图,由图可知,经过滤波后,有用信号没有减少,但高频噪声信号通过滤波器大大减少,进而保留了有效信号,同时滤除了噪声信号。
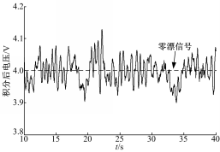
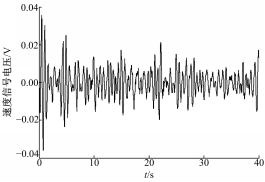
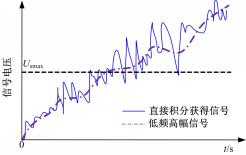
经过积分的信号会存在零漂和低频低幅的干扰信号,因而需要高通滤波器的进一步处理。图13为经过积分后的在随机不平路面行驶工况下的车身加速度信号,尽管所示信号为加速度信号积分信号,但是仍存在两类干扰信号,即前述分析的零漂信号和低频低幅信号。零漂信号大约为4 V,如图13中虚线所示,且图中存在如图2所示的干扰信号,使信号的正负符号无法与速度方向相对应。
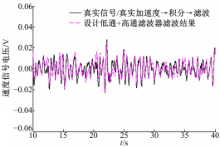
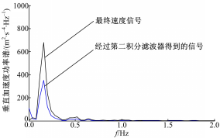
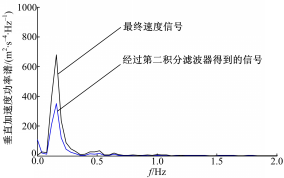
上述分析验证了本文对信号成分的分析。为进一步说明滤波积分系统信号处理效果,本文分别对应随机不平路面行驶工况的车身加速度信号进行处理,如图14所示。由图14可知,经过本文建立的信号积分滤波系统,得到了较为准确的速度信号,去除了信号中的低频零漂、低频低幅和噪声信号。图15为频域对比图,易知经过高通滤波器后,低频信号得到消除。
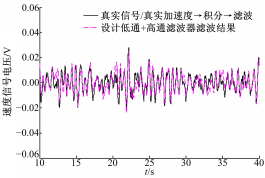 | 图14 速度信号经过滤波电路前后的时域图Fig.14 Time-domain of speed signal with and without operation with filter circuit |
通过软件仿真对该滤波积分方法进行了较好的验证。在此基础上,设计、印刷硬件电路板进行硬件在环测试。
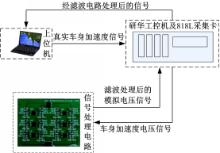
为完成滤波电路的硬件测试,在此搭建了用于滤波电路测试的硬件在环试验台,如图16所示。根据车轮数目,滤波积分电路板包含4路积分滤波电路。
硬件在环实验台包括由上位机(包含Simulink/Xpc模块)、研华工控机-818L采集卡、信号处理电路组成。测试方法为:结合研华工控机818采集卡的信号输入、输出端,通过上位机设计信号发送与采集模块,主要为模拟输出和模拟输入;通过采集卡将加入零漂和噪声的加速度电压信号发送至处理电路;最后由采集卡将积分滤波电路处理后的速度电压信号送回上位机进行数据分析处理。
通过上述构建的硬件在环平台对随机不平路面行驶工况下的车身垂直加速度信号进行处理,处理结果如图17所示。硬件试验处理得到的速度信号与目标速度一致,表明仿真结果与试验结果吻合,得到了较为准确的速度信号,为基于速度的进一步计算奠定了基础。
通过该信号处理电路,可完成随机不平路面行驶工况下的信号识别,如A级、B级路面、阶跃坡度路面等,可有效地处理和采集控制策略所需的速度信号。
(1)为研究针对主动/半主动悬架控制垂直速度获取的信号处理方案,本文从频域和幅值角度,将真实信号分为四类分别加以处理,并基于SimScape建立电气仿真模型进行仿真分析。
(2)基于信号分析和仿真的结论,设计并印制了真实硬件电路,搭建了用于信号处理的硬件在环平台,完成了积分滤波电路的硬件测试,进一步验证了本文方法的有效性,为半主动悬架控制中信号研究和获取提供一种低成本的可行方案。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|