{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
并联式混合动力装载机模糊逻辑控制策略
[赵丁选 , 张志文, 李天宇, 张民, 董岩, 兰昊]
, 张志文, 李天宇, 张民, 董岩, 兰昊]
, 张志文, 李天宇, 张民, 董岩, 兰昊]
|
|


作者简介:赵丁选(1965-),男,教授,博士生导师.研究方向:工程机器人,流体传动与控制.E-mail:zdx@jlu.edu.cn
以某5 t并联式混合动力装载机为研究对象,通过载荷谱分析了其工况特点,提出模糊逻辑控制策略,通过在线估计系统需求转矩,以需求转矩和超级电容SOC值作为输入,得到发动机和电机输出转矩。结果表明:本文控制策略改善了发动机燃油经济性,比传统装载机节油约7.8%,实现了节能效果。
It takes the loader of parallel hybrid power as the object to study the control strategy. Through analyzing the working character of a five-ton loader's load spectrum, the control method of fuzzy logic was put forward. Take the required torque of system which was estimated online and super capacitor's SOC as the input to get output torque of engine and electromotor. The result shows that the control strategy raises the fuel economy of the engine. Comparing with traditional loader, it can save about 7.8% fuel and achieve the goal of energy-saving.
装载机是现代化建设的重要工程装备,具有动作灵活、作业效率高等优点[ 1, 2, 3, 4]。但装载机工作过程中存在能耗高、排放差、发动机寿命短、维修工作量大、对驾驶员要求高等缺点[ 1, 5, 6, 7]。对于频繁启动、制动、铲掘、卸料的装载机,采用混合动力技术具有节能优势[ 6, 7]。2003年日立建机研制出第一台混合动力驱动的轮式装载机,2008年沃尔沃推出了L220F Hybrid型混合动力轮式装载机样机,2011年川崎重工推出65ZV-2型混合动力装载机,2012年John Deere开始销售644K型油电混合动力轮式装载机,国外已在系统控制、整机配置上取得了很大发展[ 3, 4, 6]。国内装载机混合动力的研究尚处于起步阶段,2010年在Bauman China广西柳工集团展出了国内首台混合动力CLG862-HYBRID型装载机,徐工集团展出了液压混合动力ZL50GS型装载机[ 5, 7]。
现有混合动力汽车整车控制策略可分为基于规则的能量管理策略和基于系统优化的控制策略[ 8, 9]。本文研究了模糊逻辑控制策略在混合动力装载机中的应用。在某5 t装载机上实现控制策略的方法,并通过Matlab/Simulink软件对混合动力系统节能效果和性能进行研究。
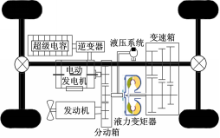
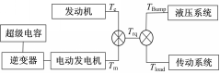
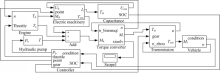
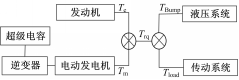
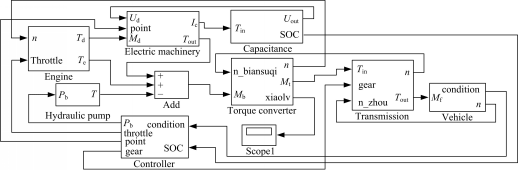
本文针对典型的并联式混合动力装载机(见图1)进行控制策略研究。选用永磁同步电机作为电动/发电机,采用超级电容作为储能元件[ 4, 5, 7]。整车系统的转矩一部分通过液力变矩器、变速箱、驱动桥驱动车辆行驶,另一部分传递给液压泵组驱动工作装置作业和控制车辆转向等。
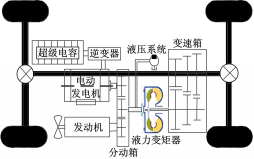 | 图1 并联混合动力装载机系统结构简图Fig.1 Structure of parallel hybrid power loader system |
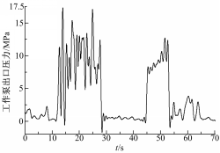
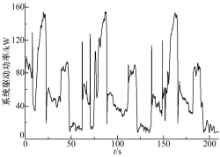
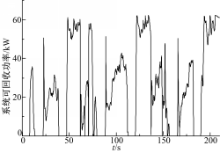
本文以某5 t装载机(发动机额定功率为160 kW)为原型。装载机典型工作循环为:空载前进→铲装→提斗→负载运输→举升物料→卸料→空载返程。图2~图4为原机实际测得的一个周期内工作泵和转向泵出口压力变化、传动轴负载转矩变化。图5和图6为三个周期内系统驱动功率与可回收功率。由载荷谱分析可知:装载机工作具有较强的周期性和波动性,能够回收的功率较大。
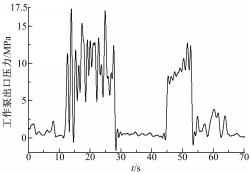 | 图2 工作液压泵出口压力变化曲线Fig.2 Outlet pressure curve of work pump |
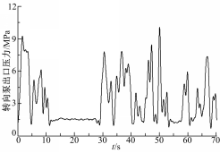
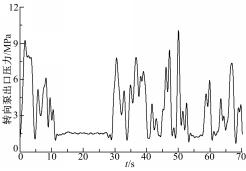 | 图3 转向液压泵出口压力变化曲线Fig.3 Outlet pressure curve of steering pump |
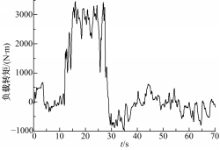
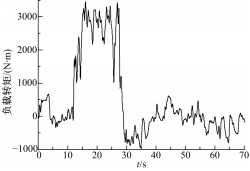 | 图4 传动轴负载转矩变化曲线Fig.4 Load torque curve on drive shaft |
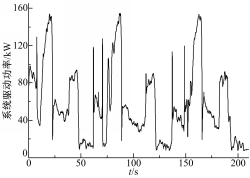 | 图5 系统驱动功率曲线Fig.5 Drive power curve of system |
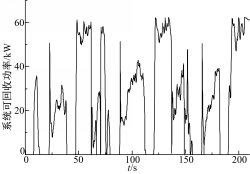 | 图6 系统可回收功率曲线Fig.6 Recyclable power curve of system |
并联混合动力装载机主要是对发动机、电动/发电机、液压系统、液力变矩器、超级电容等进行建模。为提高模型精度,在对各元件数学建模的基础上,采用理论公式和经验公式相结合的方式来描述其性能参数。
发动机模型分为动态模型和均值模型,本文研究发动机工作点的变化及燃油效率变化,由发动机万有特性曲线及台架试验所得特性曲线建立均值模型,根据输出转矩与转速查询燃油效率表求得当前油耗率。发动机动态输出转矩为

式中: Te、 Me、 Je、 ωe、 Ce分别为发动机主轴输出转矩、发动机输出转矩、发动机等效转动惯量、发动机角速度、黏性阻尼系数。
永磁同步电机建模很复杂,本文只建立电机力矩平衡方程:
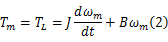
式中: Tm、 TL分别为电磁转矩和负载转矩; J为转子及负载惯量; ωm为电机机械角速度; B为粘滞摩擦因数。
液压系统数学建模复杂且实时性不强,本文采用后向式仿真方式,将液压泵载荷谱数据折算成液压系统载荷。液压系统负荷用工作泵、转向泵出口压力来表示,将液压泵出口压力折算为驱动转矩[ 7]:
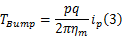
式中: TBump为液压泵驱动转矩; p、 q、 ηm分别为液压泵压力、排量、机械效率; ip为工作液压泵转速与发动机转速之比。
液力变矩器用无因次特性描述其原始特性:

式中: λB为液力变矩器泵轮转矩系数; K为液力变矩器的变矩系数; η为液力变矩器效率; i为液力变矩器的转速比。
超级电容荷电状态SOC值定义如下:
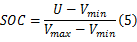
式中: Vmax、 Vmin为超级电容工作电压极值; U为当前电压。
超级电容SOC值反映了在允许的工作电压范围内超级电容储存电量的程度,是超级电容重要的控制参数[ 5]。
本文的控制策略目标是:在满足正常工作前提下,使动力源与负载更好地匹配,系统各元件高效工作,提高整机效率和燃油经济性。传统装载机由驾驶员控制油门,混合动力系统根据负载、超级电容SOC和发动机工作点等信息决定系统的工作模式。准确感知载荷的大小,通过控制策略控制电机输出,本文采用系统需求转矩实时估计来感知载荷。系统需求转矩 Trq为液压系统驱动转矩 TBump和行走系统驱动转矩 TLoad之和。液压油泵的驱动阻力矩 TBump的大小如式(3)所示,即液压油泵的驱动阻力矩在泵的排量和工作效率一定的基础上,通过监测泵的出口压力感知液压泵的驱动阻力矩; TLoad等于液力变矩器泵轮输入转矩,它可以表示为:

式中: λB为液力变矩器的泵轮转矩系数; i为变矩器的转速比; ρ为液压油密度; g为重力加速度; nB为泵轮转速; D为液力变矩器循环圆直径。即泵轮输入转矩在结构参数已知的情况下,仅随液力变矩器的泵轮转速和涡轮转速感知负载需求转矩[ 7]。
模糊逻辑控制策略是基于规则的即时控制策略,不需要精确的数学模型,具有很强的鲁棒性,能够很好地解决非线性复杂问题,适用于并联式混合动力装载机。本文采用模糊逻辑控制策略,其原则是:实现车辆自动控制,在满足工作要求的前提下,保证发动机工作效率,保证超级电容充放电平衡,如图7所示。
 | 图7 混合动力系统转矩分配Fig.7 Torque distribution of hybrid power system |
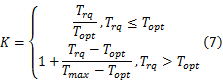
将系统需求转矩 Trq和超级电容SOC值作为模糊逻辑控制器的输入变量,运用模糊逻辑控制进行优化得到发动机的最优工作点,进而得到电机输出转矩。对于需求转矩 Trq还需要根据发动机当前油门开度下最优转矩 Topt和最大转矩 Tmax做分段处理。经过模糊逻辑控制器后输出参数为一系数 K,将其分段后得到发动机输出转矩 Te,电机的输出转矩 Tm等于需求转矩 Trq减发动机输出转矩。 K的定义如下:
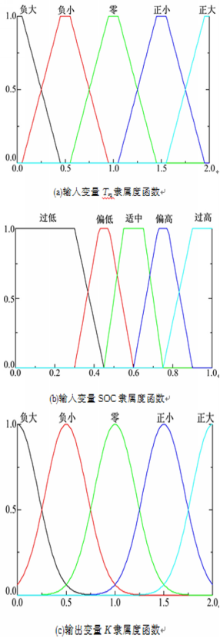
建立各参数的隶属函数,根据不同工况制定模糊规则集,图8为输入和输出隶属度函数。模糊推理的关键在于模糊规则的建立,本文的规则库由若干If-Then规则构成,表1列出了规则。采用Mamdani型模糊推理方法,该方法充分利用了专家规则库的控制知识。
| 表1 模糊逻辑规则库 Table 1 Rules base of fuzzy logic |
输入 Trq的论域为[0,2],0表示转矩为零,2表示转矩为最大值 Tmax;SOC的论域为[0.4,0.8],代表超级电容正常工作时容量的上下限;输出 K的论域为[0,2], K的值决定系统工作状态。例如:当输入 Trq负大,SOC过低,输出 K正大,由式(6)可得 Trq> Topt,即系统需求转矩大于发动机的最优转矩,此刻电机处于发电状态,将发动机工作点降低到最优转矩处,同时提高了SOC值;当输入 Trq正大,SOC过高,输出 K负大,此刻 Trq< Topt,系统需求转矩小于发动机的最优转矩,此刻电机处于电动状态,发动机工作点拉升到最优转矩处,同时降低了SOC值。 K的值控制发动机的工作点在最优转矩处,同时保证SOC值动态平衡。
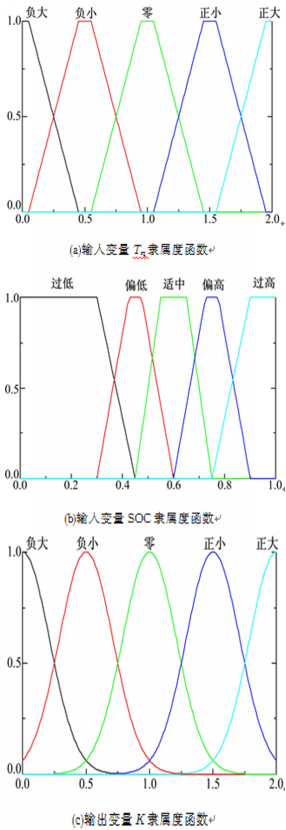 | 图8 输入输出变量隶属度函数Fig.8 Membership functions of input and Boutput variables |
模糊控制规则是通过输入 Trq,SOC的值,控制输出 K,通过 K的值反控制电机及发动机的工作状态,同时平衡SOC值。在SOC动态平衡的前提下,当需求转矩 Trq等于发动机最优转矩 Topt时,电机不工作,发动机单独驱动系统;当需求转矩 Trq小于或者大于发动机最优转矩 Topt一定值时,通过电机的工作,将发动机工作点控制在效率最优转矩曲线附近[ 7]。
基于前文系统各元件模型,应用Matlab/Simulink软件,在考虑初始条件和边界条件下建立混合动力装载机系统和传统装载机仿真模型。仿真模型包括发动机、电机、液力变矩器、液压系统组、变速箱、整车工况、超级电容和控制模块等[ 10]。
通过载荷谱计算原车发动机的平均工作功率为93.3 kW,考虑到20%的设计余量,选取110 kW功率的发动机;根据系统可回收功率曲线可知,电机可以选取额定功率为60 kW;电容器的电容 C的计算为:
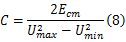
式中: Ecm代表每个周期系统最大可回收的能量,计算得893.28 kJ; Umax与 Umin为电容器的最高和最低工作电压,由电机及逆变器决定,选择 Umax=400 V, Umin=250 V;因此计算得到 C=18.3 F。模型结构如图9所示。
 | 图9 并联式混合动力装载机仿真模型Fig.9 Model of hybrid poner loader simulation |
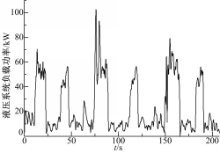
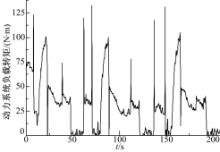
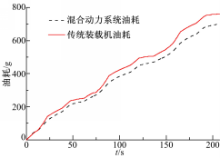
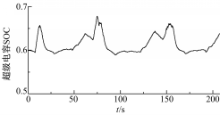
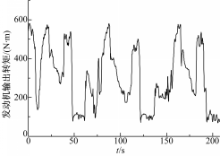
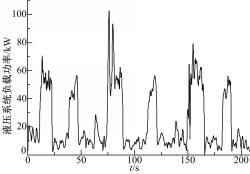
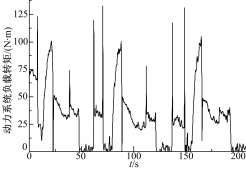
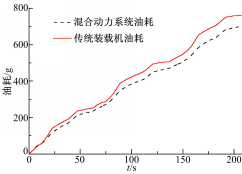
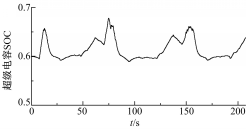
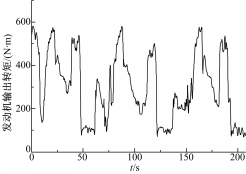
模型以实际载荷谱作为输入,图10和图11为液压系统和动力系统负载功率变化曲线。图12为传统装载机和混合动力装载机油耗对比曲线,可见混合动力装载机节油效果明显,将超级电容能量变化折算为等效油耗[ 7, 9, 10],结果显示混合动力装载机比传统装载机节油约7.8%。图13为混合动力超级电容SOC值变化曲线,可见超级电容基本工作在设定范围内,工作较为稳定。图14为混合动力系统发动机转矩变化曲线,发动机基本工作在高效区,改善了燃油经济性。
研究了并联式混合动力装载机的控制策略。分析了装载机的工况特点,研究表明:装载机工作周期性强,负载波动性剧烈,能够回收的功率较大。混合动力技术在装载机节能中具有可行性。提出了采用模糊逻辑控制策略,以保证发动机工作效率和超级电容充放电平衡。通过在线估计系统需求转矩,以需求转矩和超级电容SOC值作为输入,得到发动机和电机输出转矩。仿真结果表明:本文控制策略能够满足工作要求,发动机基本工作在高效区,改善了燃油经济性,超级电容稳定工作在设定范围内。对比结果显示混合动力比传统装载机节油约7.8%,提升了能源利用率。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|