


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
下水探测全波收录系统
[林婷婷 , 史文龙, 齐鑫, 林君]
, 史文龙, 齐鑫, 林君]
, 史文龙, 齐鑫, 林君]
|
|


作者简介:林婷婷(1983-),女,副教授,博士.研究方向:磁共振地下水探测方法.E-mail:ttlin@jlu.edu.cn
应用分离线圈技术和双向二极管技术,使核磁共振地下水探测系统死区时间由38 ms缩短至18 ms,并提高了采集到的信号的幅度。通过结合全波收录系统所需高精度同步、大数据量采集、快速数据回传的特点,以状态机和多线程操作为基础,开发了基于CompactRIO平台的全波收录系统,为地面磁共振参考消噪等多种数据预处理方法的研究提供了强大的实践平台。实验结果表明,该系统工作稳定可靠,可以为核磁共振含水层精确解释提供有效的全波数据。
Using separated Tx/Rx and two-way diodes, the full-wave recording system for Magnetic Resonance Spectroscopy (MRS) groundwater exploration can increase the amplitude of the received MRS signal, and decrease the dead time of MRS exploration from 40 ms to 18 ms. Considering the characteristics that this full-wave recording system requires high-precision synchronization, large amount of data acquisition and fast data transmission, a full-wave recording system with the core of CompactRIO is developed, which can provide a practical platform for processing algorithm such as the reference noise cancellation algorithm. Experiment results show that the developed system, which is based on the state machine and multi-threading, is reliable and has the ability of providing effective full-wave data for the MSR inversion.
核磁共振地下水探测方法是目前唯一的直接地下水探测方法[ 1],通过向100~150 m的发射线圈通入一定大小的电流,使地下某一深度含水层中的氢质子发生磁共振跃迁,当发射电流突然关断后,接收线圈就会接收到核磁共振信号,通过对核磁共振信号进行采集、数据处理、反演解释,就能够得到相应深度的地下水分布的层状图[ 2, 3, 4]。
JLMRS-I型核磁共振地下水探测仪器[ 5]可通过4N倍采样算法[ 6]对核磁共振信号进行数据采集,在保证仪器探测精度的同时,有效地缩短了探测时间,提高了探测效率。然而,由于地下水产生的磁共振探测信号极为微弱(纳伏级),在大量的电力线以及生活用电等强电磁噪声干扰下,有用的磁共振信号被淹没,使得探测仪器设备的准确度、灵敏度大大降低,甚至不能开展工作。这些背景噪声干扰可以通过参考消噪等数据预处理方法[ 7, 8]消除,但这些方法的应用,受限于仅通过4 N倍采样采集到的少量数据。这就要求现有的磁共振系统必须提高采样频率,增大采集数据量,为数据处理提供更多的信息。由于目前JLMRS型仪器的RS485的数据传输方式,大量数据回传会耗费相当多的传输时间,严重影响探测效率。而美国GMR多通道地面磁共振仪器的问世,能够通过对核磁共振信号进行全波收录,为自适应参考消噪算法的应用提供保障,也为本研究的开展提供借鉴性的思路[ 9]。
本文采用收发分离线圈和双向二极管技术,缩短了仪器的死区时间;基于美国国家仪器(National instrument,NI)公司开发的CompactRIO平台对系统硬件进行构建,在实现对MRS信号全波采集的同时,将数据通过以太网传输给计算机,实现了MRS信号的全波收录。
鉴于全波收录系统应具备高精度同步、大数据量采集、快速数据回传等特点,系统硬件部分主要由基于CompactRIO平台的采集系统构成,包括CompactRIO-9076控制器,NI-9222数据采集卡,NI-9401数字I/O卡。控制软件由LabVIEW图形化编程语言编写,采用多线程技术和虚拟仪器软件架构技术,实现仪器多任务操作,保证系统工作稳定可靠。
中国吉林大学自主研制的JLMRS-I型系统和法国的NUMIS-Plus系统采用的都是收发线圈一体工作方式,即发射线圈和接收线圈是同一线圈,通过高压继电器控制线圈和接收电路通断。但是,由于继电器的吸合过程存在一定的抖动,这会给接收电路带来脉冲成分和阶跃成分的干扰,使放大器输出的信号产生大约25 ms左右的萝卜型畸变,为了给反演解释提供准确的数据,通常将会等待25 ms之后,再对信号进行数据采集,由此抖动导致的采集等待,增大了仪器的死区时间[ 10]。
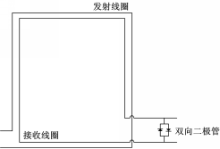
本文所介绍的全波收录系统采用收发分离线圈技术对核磁共振信号进行采集,使剩余能量得以快速释放,并通过双向二极管代替高压继电器,消除了由继电器吸合抖动带来的采集等待时间,使仪器的死区时间大为缩短,继而获得了更高信噪比的核磁共振信号,如图1所示。其基本原理在于,测量到的MRS信号 E( t)可以写成复数形式:
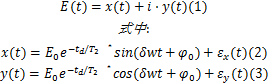
式中: td为仪器的死区时间,式(1)两边同时取模,于是有:

当减小仪器的死区时间时,可以得到幅值更高的测量值 E( t)。经过实际测试,死区时间已由原有的38 ms[ 11]缩短至18 ms。
 | 图1 MRS前端接收网络示意图Fig.1 Diagram of MRS front end receiving network |
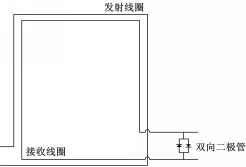
由于双向二极管的接入使得接收线圈可以感应到发射线圈的发射磁场,其原理类似于空心变压器,然而二极管从反向截止状态恢复为正向导通状态需要一定的时间,如果二极管选择不当,会出现在二极管并未导通的情况下,其两端电压已超过额定值的情况,导致二极管(甚至前置放大器)的烧毁。假设发射的正弦波电流频率为 f,接收线圈感应电压峰值为 VR0,二极管反向恢复时间为 t,前置放大器差分输入电压值为 Δu,则在不考虑二极管嵌位的情况下,接收线圈感应电压为:

使感应电压小于前置放大器差分输入电压:

整理后得:
令 f为2326 Hz, VR0为50 V得:

由式(8)可知,只要所选二极管的反向恢复时间小于390 μs,就可以满足要求。本文在兼顾考虑反向电压和导通电流的同时,选用FR607快速恢复二极管,其最高反向工作电压为700 V,正向峰值电流为200 A,反向恢复时间为500 ns,可满足本系统测量要求。
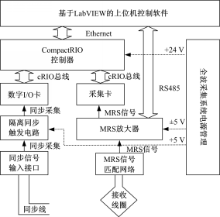
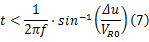
全波收录系统硬件部分是通过NI公司开发的Compact-RIO平台构建的,使用cRIO-9076控制器作为采集的控制核心,其400 MHz的工业实时处理器和10/100 Mbit/s以太网端口可满足全波收录系统开发的需要。NI-9222数据采集卡和NI-9401数字I/O卡则分别为系统提供了高精度的数据采集和同步触发功能,如图2所示。
 | 图2 系统硬件框图Fig.2 Block diagram of system hardware |
用户通过基于LabVIEW图形化语言开发的上位机全波收录系统控制软件对硬件系统进行控制。计算机通过RS485总线通讯方式与MRS放大器进行通讯,并设置放大器的放大倍数以及滤波器中心频率。由接收线圈接收到的核磁共振信号先后进入MRS信号匹配网络和MRS放大器,经过配谐、放大、滤波等信号调理[ 12]过程之后,由采集卡对其进行数据采集。同步线由同步信号输入接口接入隔离同步触发电路,隔离同步触发电路对同步信号进行隔离、滤除毛刺等处理,减弱由于大电流发射和空间环境噪声造成的干扰后,送入数字I/O卡。数字I/O卡以中断方式判断是否接收到同步采集信号,若接收到同步采集信号,则启动一次测量。全波收录系统电源管理为MRS放大器提供其工作所需的±5 V电源,为CompactRIO提供其工作所需的+24 V电源,为隔离同步触发电路提供其工作所需的+5 V电源。
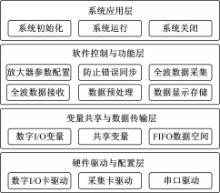
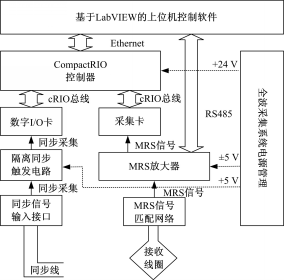
从仪器功能及硬件组成出发设计全波收录系统软件,共由4层构成,如图3所示。
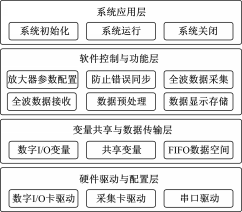 | 图3 系统软件框图Fig.3 Block diagram of system software |
硬件驱动层直接接触底层硬件,负责数字I/O卡、采集卡、串口的驱动。在变量共享与数据传输层,同步信号由数字I/O卡引入,以数字I/O变量的方式被系统读取;采集到的MRS信号全波形数据通过在CompactRIO平台与计算机之间建立的DMA FIFO实现大容量、高速度全波数据传输;通过共享变量实现控制指令的传输。软件控制与功能层描述放大器参数配置、防止错误同步、全波数据采集、全波数据接收、数据预处理以及数据显示存储等工作过程,分别实现放大器放大倍数以及滤波器中心频率的配置、软件方式防止错误触发采集的功能,以及MRS全波数据采集、高速10/100 Mbit/s以太网端口全波数据传输、平均值滤波算法提高信号信噪比以及数据的实时显示和ASCII文件格式存储。系统应用层为用户提供整个系统的控制界面,并通过各层之间的接口与数据流实现对全波收录系统的控制。
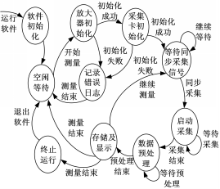
本文通过状态机的方式描述全波收录系统的工作过程,如图4所示。
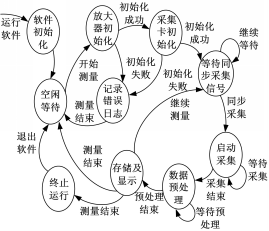 | 图4 系统运行状态机Fig.4 Operation state machine of system |
软件运行后会进入初始化状态,为测量做准备工作,如建立测量数据文件夹,计算测量次数等。软件初始化成功后,系统将进入空闲等待状态,在用户输入控制指令并启动测量后,软件将先后对放大器、采集卡进行初始化,设置放大器的放大倍数,滤波器的中心频率以及采集卡的采样频率。如果初始化失败,软件将会对发生的错误进行记录并返回至空闲等待状态。如果初始化成功,软件将启动测量,并进入等待同步状态;在接收到同步采集信号后,软件将先后对MRS信号进行数据采集、数据预处理和数据的存储及显示,此后,软件会判断测量是否已经达到设定的测量次数,若达到,则结束测量,否则继续等待同步采集信号,准备进行下一次的测量,用户也可以在存储及显示后终止系统的运行。
发射机通过同步线缆将同步采集信号传输给接收机,从而实现同步采集,当同步采集信号出现下降沿时,即表明发射机通知接收机开始采集[ 13]。但是,在发射电流较大或环境噪声较大时,同步线缆中的同步采集信号会受到一定的干扰,使同步采集信号的下降沿产生毛刺,导致错误地触发系统进行数据采集。本文通过硬件、软件两方面抑制以上错误的产生,并通过实验证明,可有效地防止错误触发采集的产生,如图5所示。
 | 图5 防止错误触发原理图Fig.5 Principle map of preventing incorrect trigger |
2.2.1 硬件抑制误触发的实现
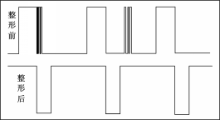
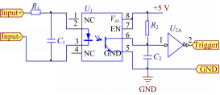
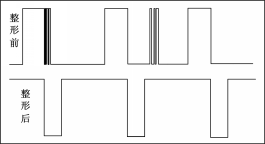
硬件方面是通过隔离同步触发电路实现的,如图6所示,通过光耦隔离同步触发信号,避免直接将同步线缆接入系统,在输入、输出端均采用阻容滤波网络对下降沿附近的毛刺进行滤波,通过非门增大驱动能力,对跳变沿进行整形,使信号边沿变得陡峭。
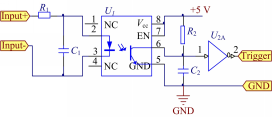 | 图6 隔离同步触发电路图Fig.6 Circuit diagram of isolate synchronous trigger |
2.2.2 软件抑制误触发的实现
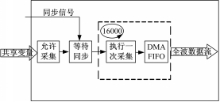
软件方面采用状态机方式,以40 MHz的频率对经隔离同步触发电路输出的同步信号进行计数,高电平开始计数,遇到低电平则计数器清零,当计数值为200 000时,即信号保持5 ms的高电平后,则认为是有效的高电平,系统将进入允许采集状态,随后有下降沿到来时,触发采集系统开始数据采集,如图7所示。
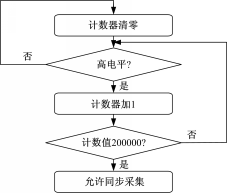 | 图7 软件抑制误触发流程图Fig.7 Flow diagram of preventing incorrect trigger via software |
全波数据的采集是整个全波收录系统的核心。如图8所示,控制软件通过共享变量实现计算机与CompactRIO平台间控制指令和工作状态的传输,在放大器和采集卡初始化成功之后,系统将允许采集并等待同步信号。一旦同步触发,系统将进行一次采样频率为66.7 kHz、采样时间为240 ms、采样点数为16 000个点的MRS测量。全波数据的传输是通过在计算机与CompactRIO平台间建立DMA FIFO实现的,每一次采集的数据都会被存入到DMA FIFO中,DMA FIFO的深度设置为16 000,当一次MRS测量结束后,DMA FIFO中16 000个点的数据会通过以太网端口传送给计算机,其传输过程通过DMA方式完成,不需要CPU进行干预,大大提高了系统运行的稳定性。
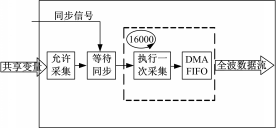 | 图8 全波数据采集示意图Fig.8 Diagram of full-wave recording |
2.4.1 数据预处理
由于每一脉冲矩下单次测量结果的信噪比较低,而数值模拟研究结果表明在MRS测量中信噪比的大小是评估地下水测量好坏的重要依据。本文采用平均值滤波算法,即通过叠加求平均值的方法对所采集的核磁共振信号进行预处理,可有效地降低环境噪声对MRS信号造成的干扰,提高核磁共振信号信噪比[ 14, 15]。
2.4.2 数据存储
LabVIEW中最常用的3种数据存储方式是ASCII文件格式、直接二进制存储、TDMS文件格式。其中ASCII文件格式有良好的共享功能,其文件可在不同的软件中轻松地打开,直接二进制文件可以提供随机访问功能,TDMS文件格式可以有效地简化用户的编程,由于本系统需要所取得的数据为多数软件所共享,对存储能力和随机访问等功能要求不高,所以,选择ASCII文件格式作为文件存储格式。
使用安捷伦33220A信号源,产生正弦波信号,通过模拟线圈将信号源输出信号进行衰减,再将衰减后的信号输入全波收录系统,在这种条件下,分别对信号连续性和相位一致性进行测试。
3.1.1 信号连续性
信号的连续性是通过离散小波变换的方式进行判断的,采用db4小波对信号进行1级小波分解,遍历全部数据点,并未发现数据间断点,证明信号是连续的。
3.1.2 相位一致性
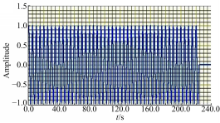
由于系统采用的数据预处理方法为平均值滤波算法,如果参与运算的各次数据相位不一致,将会对叠加后的结果造成严重影响,使叠加后的波形产生畸变。本文对信号进行了32次采集,将这32次结果叠加并应用平均值滤波算法,实验结果如图9所示,波形没有发生畸变,证明了所采集信号的相位是一致的。
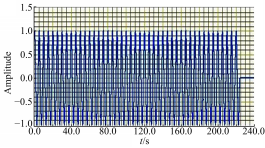 | 图9 室内模拟信号32次叠加图Fig.9 Superposition diagram of 32 sampling simulation source indoor |
建立了一种核磁共振地下水探测全波收录系统,通过采用分离线圈和双向二极管技术,缩短了仪器死区时间,基于CompactRIO平台实现了核磁共振信号的全波收录,为核磁共振探测提供了大信息量的核磁共振数据,同时,也为小线圈和参考消噪算法的应用提供实践平台。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|