测量丢失不确定性系统的迭代鲁棒滤波
 , 王挺峰, 郭劲
, 王挺峰, 郭劲 Iterative robust filtering for uncertain systems with missing measurements
FENG Jian-xin, WANG Ting-feng, GUO Jin
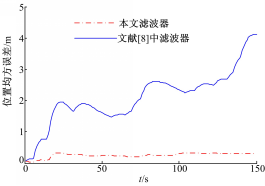
, WANG Ting-feng, GUO Jin Fig.1 Mean square error for position #cod#x003b8; =0.9#cod#x000b0;