基于改进蚁群算法的搜索机器人路径规划
 , 王曦辉, 刘富
, 王曦辉, 刘富 Path planning of searching robot based on improved ant colony algorithm
KANG Bing, WANG Xi-hui, LIU Fu
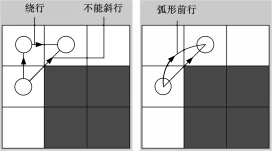
, WANG Xi-hui, LIU Fu Fig.2 Diagonal forward and arc forward