


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于网络测量的电动车驱动控制系统建模仿真
[于赫1  , 秦贵和
, 秦贵和1, 2 , 陈筠翰1 ]
, 秦贵和, 陈筠翰|
|


作者简介:于赫(1982-),女,博士研究生.研究方向:实时网络控制系统.E-mail:he08@mails.jlu.edu.cn
针对Internet产生的时延问题,提出使用网络测量RTT时延来研究Internet时延对远程实时电动车驱动控制系统产生的影响,分析了影响RTT时延的网络因素,使用主动测量方式对RTT时延进行测量、对比和分析,建立了简单有效的远程电动车控制模型并进行了仿真实验,实验结果能够正确反映Internet网络时延对电动车控制系统带来的影响,为进一步的研究工作提供了一种有效的工具。
For the delay problem of Internet, a Round Trip Time (RTT) latency measurement of network was proposed to study the impact of the Internet delay on the remote real-time drive control system of electric vehicle. The factors that affect the RTT latency were analyzed, and the RTT delay was measured and analyzed using active measurement. An effective remote control model of electric vehicle was proposed and simulations were conducted. The simulation results accurately reflect the impact of Internet delay on the control system of electric vehicle, and provide an effective tool for further research.
近些年来,越来越多的学者开展了将Intertnet与各类型控制系统结合的应用研究,使控制系统在互联网上得到延伸,推动了现代信息技术与传统控制领域的发展融合。使用Internet为传输通道的网络控制系统必须要面对互联网的高度复杂性,其中异构性、动态性、以及庞大的规模,这些都给基于互联网的控制系统发展带来不可预知的挑战[ 1]。
网络控制系统(NCSs)大体可以分为两类:一种是网络上的控制(Control over network),这类型研究侧重于控制策略、管理算法以及通过整体网络控制系统的设计来降低网络连接引入的影响[ 2]。另外一种是网络化的控制(Control of network),通过对通信网络的研究,使其更易于应用在实时网络控制中,如网络时延、网络协议等。
在对基于Internet的网络控制的研究中,有学者使用TrueTime工具箱仿真Internet网络行为,从而辅助设计网络控制系统[ 3, 4],对于分布式、事件相关以及需要协作和共享的网络控制系统,TrueTime工具箱可以快速有效地对控制策略进行仿真和评价[ 5]。但在点对点远程控制系统的应用中,面临更多的问题是实时控制信号在特定网络链路传输时产生的时延、抖动,因此本文提出使用网络测量的方法来分析研究Internet对远程电动车驱动控制系统产生的影响。
网络测量是使用一定的方法和技术采集测量数据,并通过测量数据的分析和计算,对测试网络的状态和性能进行评估。
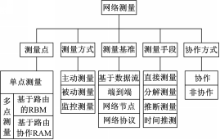
网络测量的内容涵盖网络的各个方面,包括网络流量、拓扑、时延等。测量的方式也有所不同,分类及其联系见图1。
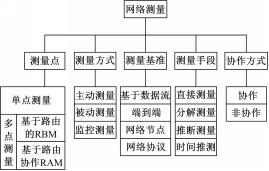 | 图1 网络测量方式分类及其联系Fig.1 Internet measurement classification |
在测量内容中,网络控制系统对时间延迟最为敏感,也是网络控制理论中困扰人们多年的问题。本文着重关注对网络时延的分析和测量,以便对其在实时电动车控制系统中产生的应用效果进行分析研究。
一般来说,Internet时延 Tr由5个部分组成:

上式等号右边的参数说明如下:
(1)传播时延(Propagation delay, Tew):数据报在物理链路中的传输时间,由数据报发送到传输链路上首个比特到该比特目标节点的时间,由链路的物理特性决定,与业务量无关。
(2)排队时延(Queuing delya, Tq):数据报进入节点的缓冲区后,等待传输的排队时间,一般情况下 Tq由路由器中的交换结构决定,受缓冲区和路由算法影响较大。
(3)处理时延(Processing delay, Tp):每次交换对数据报的处理时间,数据报到达节点的时刻至节点的输出端之间的时延,不包括排队延迟,它受节点的计算能力的影响。
(4)传输时延 Tt(Transmission delay, Tt):数据报从开始发送至完全发送到传输链路的时间,即发送节点发送数据报的第一个比特至发完最后一个比特的时间。
(5)扰动时延(Disturbance, Td):传输中未知和不可预测的扰动。
本文选取的测量方法是基于ICMP协议的端到端往返时延的测量,其优势在于ICMP协议已被广泛支持,且测量不需目标主机主动参与,不增加目标主机的运行负载。基于ICMP协议的测量是应用时间最早且至今仍在广泛使用的测量方法,例如Ping、Traceroute、Skitter等[ 6, 7, 8]。
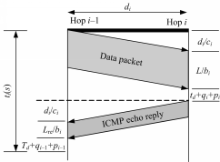
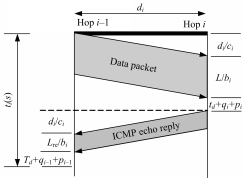 | 图2 基于ICMP响应端到端往返时延模型Fig.2 Model of E2EM round-triptime with ICMP |
综上,建立一个ICMP响应报文的时延模型,如图2所示,其中 L为数据报的大小; Lre为ICMP应答报文的大小; ci为第 i条链路的传输速率; di为第 i条链路的物理长度; bi为第 i条链路的传播速率; pi为数据报在第 i个节点的处理时延; qi为数据报在第 i个节点的排队时延; td为数据报在第 i个节点的扰动时延。
在第 i条链路产生的时延为 ti( s):

假定第 i节点未发生变化且 pi-1≈ pi, qi-1≈ qi,合并扰动时延 td,则有:

则对于一个 n跳的链路,发送一个 L比特的ICMP探测包的往返时延(RTT)为:

由式(4)可知,网络时延可以划分为线性时延和随机时延两个部分,其中( L+Lre) /bi和 di/ci两项产生的时延可以看做线性时延,它随着节点处理速度和路由路径的选择而产生线性变化;其中 pi、 qi、 td三项产生的时延随网络环境的变化而随机改变,形成网络时延中最为复杂的随机部分。
实验选择了四组处于不同地理区域的Internet节点进行端到端RTT时延测量:校内不同校区之间,校内网到北京邮电大学,校内网到东北大学,校内网到新浪网。每500 ms发送一个56个字节的探测包,每次采样3000个包,测量统计结果见表1。
| 表1 Internet节点时延测量 Table 1 Measured delay in some Internet nodes |
从表1的统计数据显示,不同链路存在不同的最低时延,这是由网络建设时的物理结构造成的,可以对应式(4)中 


图3给出了后3种非局域网的时延测量结果,可以更直观地表现不同链路在不同时间的端到端RTT时延情况。从图3中可知北京邮电大学和新浪网两条线路在测量期间大部分时延在一个均值上下小范围浮动,随机出现高时延且伴有小范围聚集情况,能预见的网络事件可能为链路节点拥塞、当机;东北大学线路在第500至1000个探测包期间,时延跃升到一个更高的区间活动, 能预见的网络事件可能为路由切换或者短时间的访问增量。
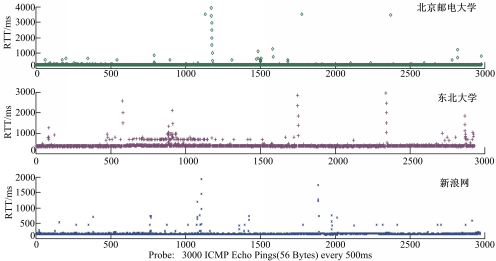 | 图3 3种非局域网的时延测量结果Fig.3 Measured delay in three non-local area networks |
由此可见Internet时延受到各种网络环境、Internet事件影响,随机性强、变化范围大、规律不明显,这些都对基于Internet的实时控制系统的发展研究带来相当大的困难。端到端主动测量可以在没有路由器参与、不需要ISP协助的的情况下对目标网络性能进行测量,对网络负载影响小且易于实施,对于要求实时性的远程网络控制系统来说是非常好的选择。想要建立精确的Internet传输时延的数学模型相当困难,只能从宏观上使用统计学方法研究其统计特征,这也是目前Internet时延测量研究的一个主要方向。
要仿真Internet远程驾驶电动车,需要建立一个简明有效的电动车的理论计算模型,主要分为驱动电机部分[ 9]以及车辆动力学部分和驾驶员部分[ 10, 11]。
直流电机模型参数有:电枢电阻 Ra;电枢电感 La;转动惯量 J;粘性摩擦因数 B;反向电动势常数 Kb;转矩系数 KT。
额定直流电机电枢回路平衡方程为:
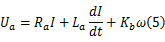
式中: Ua、 I分别为电枢的电压、电流; ω为电机转子角速度(rad/s)。
电机产生的力矩 M为:
式中: θ为电机转子角度。
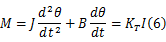
由式(5)(6)整理可以得到驱动电机模型:
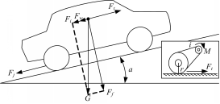
车辆平稳行驶时,车辆驱动力与所受到的阻力保持平衡,车辆受力如图4所示。
 | 图4 车辆行驶过程受力图Fig.4 Force diagram of vehicle dynamics |
车辆行驶过程的动态平衡方程表述为:

式中: Ft为汽车驱动力; Ff为滚动阻力; Fw为空气阻力; Fi为坡度阻力; Fj为加速阻力。
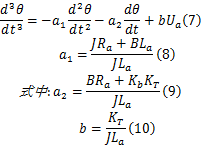
电动车的驱动力由电机提供,电动车的行驶方程式可以表示为:
式中: M为电机输出转矩; i为传动系统传动比; η为传动系统机械效率; r为轮胎半径; G为车辆重力; α为路面坡度; f为滚动阻力系数; CD为空气阻力系数; A为车辆迎风面积; v为车速; δ为汽车旋转质量换算系数; ma为车辆质量。
式(13)中,令 α、 ja为0时可以描述车辆匀速行驶状态; α=0, ja>0时可以进行车辆加速性能计算; α>0, ja=0时可对车辆爬坡性能进行计算。
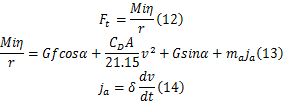
车速 v的计算公式:
式中: Fj_veh为车辆的加速驱动力,可以表示为:

车速 v与电机转速 n之间的关系可以表示为:
行驶距离 S为:

为了更直观地反映网络时延对系统的影响,驾驶员模型使用原始驾驶员动作信号进行开环控制,主要包括加速踏板开度、制动踏板开关、档位、方向盘转角等,如图5所示。驾驶员动作信号以采样频率直接发送至Internet,通过网络传送至电动车端系统执行控制。
 | 图5 基于Internet远程驾驶电动车Fig.5 Electric vehicle remote-driven via Internet |
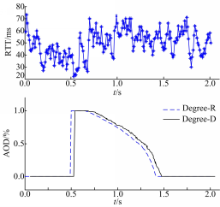
仿真实验为驾驶员急速踩下踏板的一个加速动作,在Matlab/Simulink下建立电动车驱动系统模型,使用一组踏板开度信号作为控制系统输入,并引入测量网络时延对车辆加速情况进行离线仿真实验。加速踏板开度和测量时延数据如图6、图7所示。
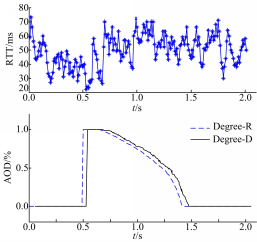 | 图6 RTT时延及加速踏板开度Fig.6 Round-triptime delay and accelerator opening degree |
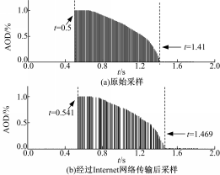
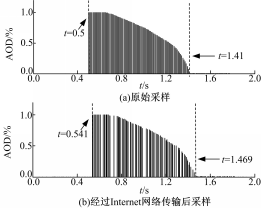 | 图7 加速踏板开度采样Fig.7 Sampling of accelerator opening degree |
图6中Degree-R为驾驶员急速踩下踏板的一种理想信号输入,其驾驶行为描述为:在0.5 s时急速踩下加速踏板到最大开度,维持短暂时间后缓慢抬起,至1.4 s左右完全松开加速踏板。对该踏板开度信号进行频率为100 ms的采样,作为控制输入信号,直接发送至Internet。测量一组与踏板开度采样频率相同的Internet时延,并从中随机截取输入信号长度的数据,探测包发送频率为100 ms,如图6中RTT/ms所示。图6中Degree-D为电动车模型经过网络传输后收到的踏板开度控制输入信号,图6中的Accelerator Opening Degree(AOD)显示了踏板开度控制信号经Internet网络传输后的变化情况。
对于使用Internet远程发送的实时控制信号,采样时间短,发送频率高,通常情况下,Internet网络时延在选择不同链路和节点时差别巨大,仿真实验选择的链路测量时延最小值大于采样时间间隔,且最大时延为采样间隔的7倍,因此在选择无连接数据服务进行发送时会产生数据报乱序的情况。如图7所示,图7(a)为原始采样后的踏板开度信号,采样频率100 ms。图7(b)为经过Internet网络传输后的踏板开度信号,在0.5~0.8 s期间,有两次出现高时延的跳跃,随后缓慢下降,经过Internet网络传输后的控制信号向后堆积并有乱序发生,可以预见踏板开度最大时加速信号向后堆积会造成实际加速时间的延长,对电动车驱动控制来说实际达到的速度会高于驾驶员期望速度。
使用原始踏板信号和经Internet网络传输后的加速踏板信号对电动车加速情况进行仿真,电动车模型参数见表2,电动车模型设置为无档位、无坡度、开环调速控制,仿真结果如图8所示。
| 表2 电动车模型参数 Table 2 Parameters of electric vehicle model |
 | 图8 速度和输出转矩响应曲线Fig.8 Response curve of velocity and torque |
图8(a)为速度变化曲线,V-R为无网络情况下使用原始加速踏板信号的车速响应曲线,电动车电机在0.5 s时启动,启动负载扭矩约为60 N·m,在1.03 s达到最大值;V-D为使用测量时延的加速踏板信号下的车速响应曲线,在1.07 s达到最大,并且其最大值略高于无网络情况下的车速最大值,与估计结果一致。图8(b)为输出转矩变化响应曲线,TE-R为无网络情况下的输出转矩响应曲线,TE-D为使用测量时延的加速踏板信号下的转矩变化响应曲线。在最高点处的放大图可以看出,存在Internet网络时延情况下输出转矩在0.5~0.65 s期间发生两次较大的抖动,这与实验测量网络时延信号数据相吻合。
通过网络测量技术对Internet网络时延的产生进行分析和测量,并建立一个基于网络测量的电动车驱动控制模型。仿真分析了实际测量Internet时延对远程控制系统产生的影响,为更加深入研究基于Internet的电动车远程实时控制系统提供了一个有效的工具。基于Internet的实时远程控制面临的挑战不仅仅是网络时延, 而且
丢包、乱序等问题都比传统工业总线网络更复杂,这些都是未来需要深入研究的问题。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|