









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
混合动力客车能量管理设计及硬件在环试验验证
[王俊 , 王庆年, 曾小华, 王鹏宇]
, 王庆年, 曾小华, 王鹏宇]
, 王庆年, 曾小华, 王鹏宇]
|
|


作者简介:王俊(1985-), 男,博士研究生.研究方向:混合动力汽车关键技术.E-mail:wangjun9161029@163.com
构建了混合动力客车的仿真模型,利用Cruise的实时仿真模块下载车辆模型至dSAPCE/Simulator作为整车的底层仿真平台。构建了基于stateflow的多模式整车能量管理控制策略,通过算法优化得到各模式最佳工作区域,从而确定多模式之间切换规则;利用自动代码生成技术生成代码并将其下载至TTC200控制器中,进行TTC200控制器与Simulator实时的硬件在环试验。试验结果与离线的仿真结果对比表明:整车控制策略的实时性较好,CAN总线通讯良好,减少了后续的实车调试周期。
A simulation model of electric hybrid buses was proposed, which is downloaded into the DSAPCE/Simulator using the Cruise real-time simulation modules as the simulation platform of the underlying vehicle model. Energy management control strategy based on the stateflow multi-mode operation control algorithm was established. The optimized algorithm was used to acquire high efficiency working areas as the control rules among the different modes, which were downloaded into TTC200 controller through automatic code generation technique. Then real-time loop test was carried out between TTC200 controller and Simulator hardware platform. The results show that, compared with offline simulation, the vehicle control strategy has good performance in real-time control and CAN bus communication works well, which reduces the subsequent vehicle debug cycle.
混合动力车辆属于多动力源系统,通过合理协调各动力源输出的转矩来保证车辆的动力性和提高车辆的经济性。国内外学者对混合动力车辆建模与仿真做了大量的研究工作,例如,文献[1]中提出的等效最小燃油消耗算法以及文献[2]提出自适应性能量管理算法,这些算法均只进行离线仿真。但当控制策略过于复杂时会导致策略的实时性较差,使得离线仿真结果与实车控制的效果差距较大。进行实车试验时,整车上的控制信号精度是控制策略精确协调控制的保证,但到实车上传输的控制信号非常多,如果能够在上车试验之前将整车信号通讯配置良好将会大大降低实车调试周期。为此本文提出多模式能量管理控制策略[ 3]并进行了硬件在环试验,验证策略实时性及CAN总线通讯,从而减少实车试验的调试周期。
本文采用先进的商业车辆底层仿真平台CRUISE搭建了整车模型,该软件仿真精度高,搭建模型较快,能够满足项目快速开发的需求。同时采用Matlab/Simulink构建整车控制策略,利用Stateflow有限状态机构建优化的模式切换规则,并在每个模式下进行合理分配,通过离线的联合仿真验证了整车控制策略的合理性。将CRUISE搭建的底层模型下载至dSPACE/Simulator模拟整车实时环境,将Simulink构建的整车控制策略模型,通过代码生成技术将其下载至TTC200控制器中模拟实车控制器。硬件SIMULATOR与TTC200控制器利用CAN总线交换数据模拟实车运行进行硬件在环的试验验证,为实车试验做准备。
该混合动力系统主要由发动机、M1电机、M2电机、AMT变速器、动力电池等部件构成,如图1所示。其中M2电机主要是为车辆起步以及车辆低速行驶时提供动力,并在较低速时调节发动机工作点至高效工作区域内。M1电机主要是在电池电量不足时吸收发动机转矩为电池充电以及较高速时调节发动机工作点至高效工作区域内[ 4, 5]。
 | 图1 混合动力客车的动力系统结构图Fig.1 Hybrid electric bus powertrain structure |
混合动力客车主要包括车辆纵向动力学模型、发动机模型、电机模型和电池模型等。
车辆的运行状态由驱动转矩、制动力矩以及行驶阻力共同决定:
式中:
车辆的行驶阻力由坡道阻力、滚动阻力和空气阻力组成。
式中:
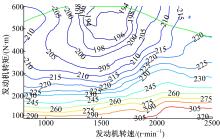
由于发动机是一个非常复杂的非线性系统,很难将发动机的所有动态特性都模拟出来,故实际发动机模型中更多采用的是参数查表求解发动机的输出转矩和实际油耗[ 6, 7],如图2所示。
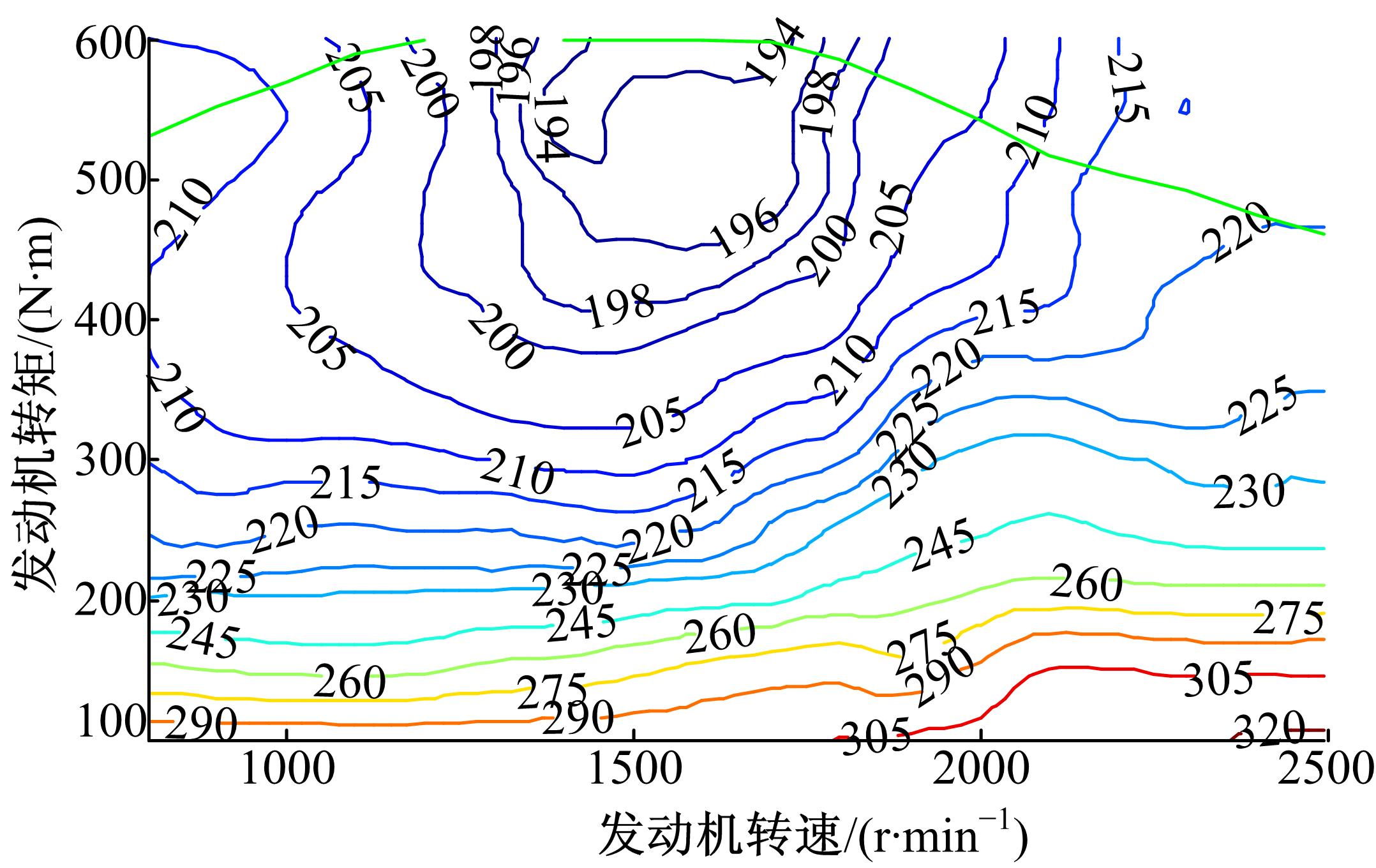 | 图2 发动机万有特性图Fig.2 Engine fuel consumption characteristics map |
发动机转矩输出为:
发动机瞬时油耗为:
式中:
电机在混合动力车辆中既能够为车辆提供驱动力,又能够回收部分能量,其效率特征如图3所示。
电机的效率为:
电机的功率为:
式中:
 | 图3 电机效率特性图Fig.3 Motor efficiency characteristic map |
电池的SOC为:
电池的电流为:
式中:
能量管理控制策略主要包括转矩需求计算、车辆运行模式抉择和转矩分配3个部分,具体见图4。
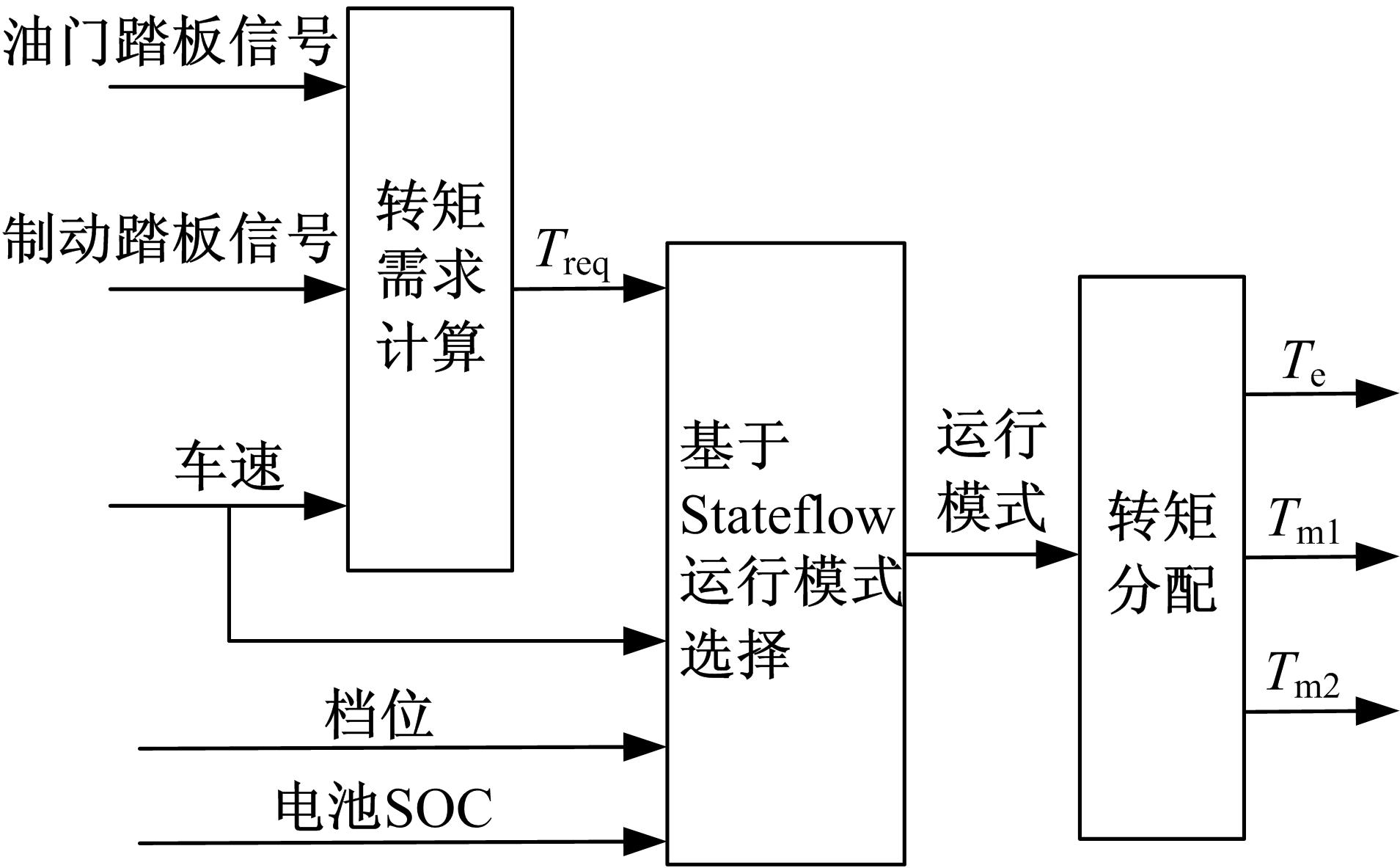 | 图4 能量管理控制框图Fig.4 Energy management control block diagram |
根据混合动力的动力耦合方式进行转矩叠加,获取叠加后的转矩外包络线,将外包络线通过曲线拟合使得需求转矩平缓,为此获取的变速器输出轴处等效需求转矩如图5所示。在不同车速以及油门踏板开度下计算出需求转矩
式中:
 | 图5 等效需求转矩Fig.5 Equivalent torque requirements |
发动机最优工作曲线对应的转矩为:
假设发动机工作点优化前油耗为:
其中
则发动机工作点被优化后的油耗为:
当发动机优化后的等效油耗低于发动机优化前的等效油耗,则表示此时发动机的工作点需要调节,否则不需要调节发动机的工作点。
图6中发动机工作点由b点调节至a点运行时,需要让发动机释放出更大的功率为电池充电,而实际车辆运行时的发动机需求功率在b点已经足够,为此在此过程为电池充电所消耗的油耗(g/h)为:
式中:
 | 图6 发动机工作点优化前后对比Fig.6 Engine working point before and after optimization |
若多余的能量全部用于驱动,则表示此时不对发动机工作点进行优化,这部分燃油获得的能量为1 /gb(kWh·g-1)。
若对发动机的工作点进行优化调节,此时需要将多余的能量给电池充电,然后电池最终还是会将能量释放,为此会经历电池充电和放电的二次转化过程,此时通过计算可得到这部分燃油获得的能量:
式中:
上述参数均通过插值获取。
当
反之,当
考虑到电池充电后再放电的效率以及电机放电效率均无法确定,故简化效率
取
假设
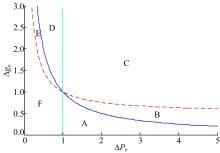
图7中,A、C、D、F区域继续保持发动机原状态;B区域采用电机发电优化发动机转矩;E区域采用电机助力优化发动机转矩。故可求得发动机单独驱动模式与发动机驱动并发电模式之间的效率切换线,通过对这些点的拟合即可获取发动机单独驱动时最低工作临界线
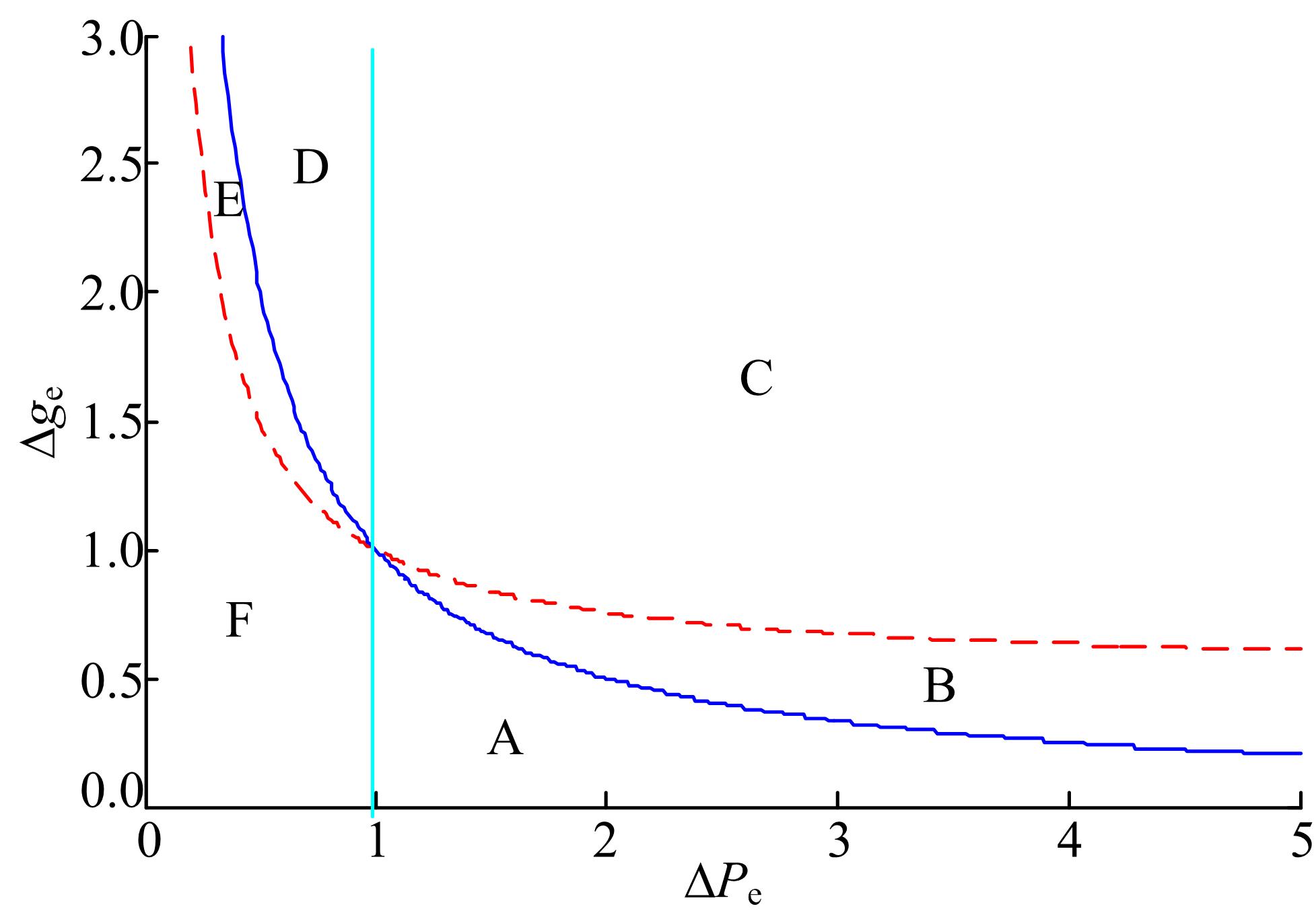 | 图7 功率比与油耗比Fig.7 Power ratio and fuel consumption ratio |
由于该混合动力车辆可分为两种并联模式,故需要分别获取其等效的切换曲线,如图8所示。
 | 图8 并联模式下的驱动模式分界Fig.8 Drive mode boundary in the parallel mode |
利用上述求解的发动机单独驱动的高效区下限和发动机外特性曲线作为运行模式切换的条件,构建发动机单独驱动还是并联模式1、并联模式2驱动的迁移规则,以及电机单独驱动、串联模式、再生制动、机械制动等模式之间的切换规则,具体如图9所示。
 | 图9 基于Stateflow的运行模式决策机Fig.9 Mode decision strategy based on the stateflow |
图中将并联模式1与并联模式2分别分为并联驱动和行驶充电。其中,并联模式中行驶充电指发动机处于驱动并充电模式时,发动机处于最佳工作曲线上;并联驱动指发动机与电机联合驱动时,发动机运行在外特性曲线上。
本文采用先进的快速原型仿真软件设计,将CRUISE离线仿真的结果与硬件在环的试验仿真结果对比,验证控制策略的实时与合理性以及整车信号的通讯精度是否足够,为后续实车试验提供保障。
将CRUISE仿真模型下载至Dspace/Simulator中作为实时仿真的车辆底层模型,其中Simulator/ds1006处理器板是dSPACE用于快速原型(RCP)和半实物仿真(HIL)领域处理速度最快的处理器板,它采用64位Opteron处理器,主要应用于处理动力系统和虚拟车辆等复杂的、大型的,对处理器性能要求极高的模型。采用该处理器能够满足实车工作环境的精度要求。
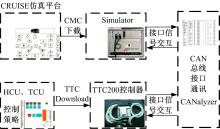
将整车控制策略下载至TTC200模拟车辆的整车控制器,其中TTC200是一款汽车多用途控制器,采用的是32位飞思卡尔MPC555处理器,具有多路I/O数字量输入输出接口,以及多路A/D与D/A数模转换接口,能够满足车辆控制需求,该控制器可通过CAN总线接口与Simulator的底层仿真模型进行硬件在环仿真来模拟车辆真实的运行环境,见图10。
 | 图10 硬件在环系统构成Fig.10 Hardware in the loop system structure |
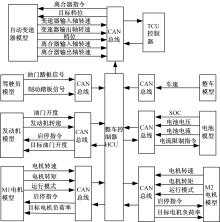
系统整体模型通过CRUISE仿真建模并将该模型下载至Simulator中,在CANalyzer软件中配置整车需要通讯的信号,定义每一个信号的位数、数据类型等来构建CAN总线的信号接口,将整车控制策略HCU与自动变速器控制策略TCU共同下载至TTC200进行硬件在环仿真实验。其中,驾驶员模型模拟加速踏板开度和制动踏板开度信号。按照HCU在实车上信号的类型,将加速踏板总线信号与制动踏板信号输入HCU。发动机模型根据车辆运行状态计算出发动机转速和油门开度,并通过CAN总线将信号传入HCU,整车控制器HCU通过CAN总线向发动机模型发出目标油门开度和启停指令。M1和M2电机模型将当前的电机转速、转矩和工作模式通过CAN总线发送给HCU,HCU根据控制策略将电机启停指令和电机目标负荷率通过CAN总线发送给电机模型。整车模型将计算出的车速发送给HCU,电池模型将计算得到的电池荷电状态、电池电压和电池电流发送给HCU,HCU根据控制策略将电池输出电流限流指令通过CAN总线发送给电池模型。自动变速器模型将变速器输入轴转速、变速器输出轴转速、档位、离合器输入轴转速、离合器输出转速通过CAN总线发送给TCU,与此同时整车控制器HCU将车速、发动机转速和发动机目标油门开度通过CAN总线发送给TCU,TCU将目标档位和离合器指令通过CAN总线发送给自动变速器,如图11所示。
 | 图11 信号通讯结构Fig.11 Signal communication structure |
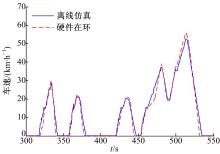
模型离线仿真与硬件在环试验验证结果如图12、图13、图14所示。
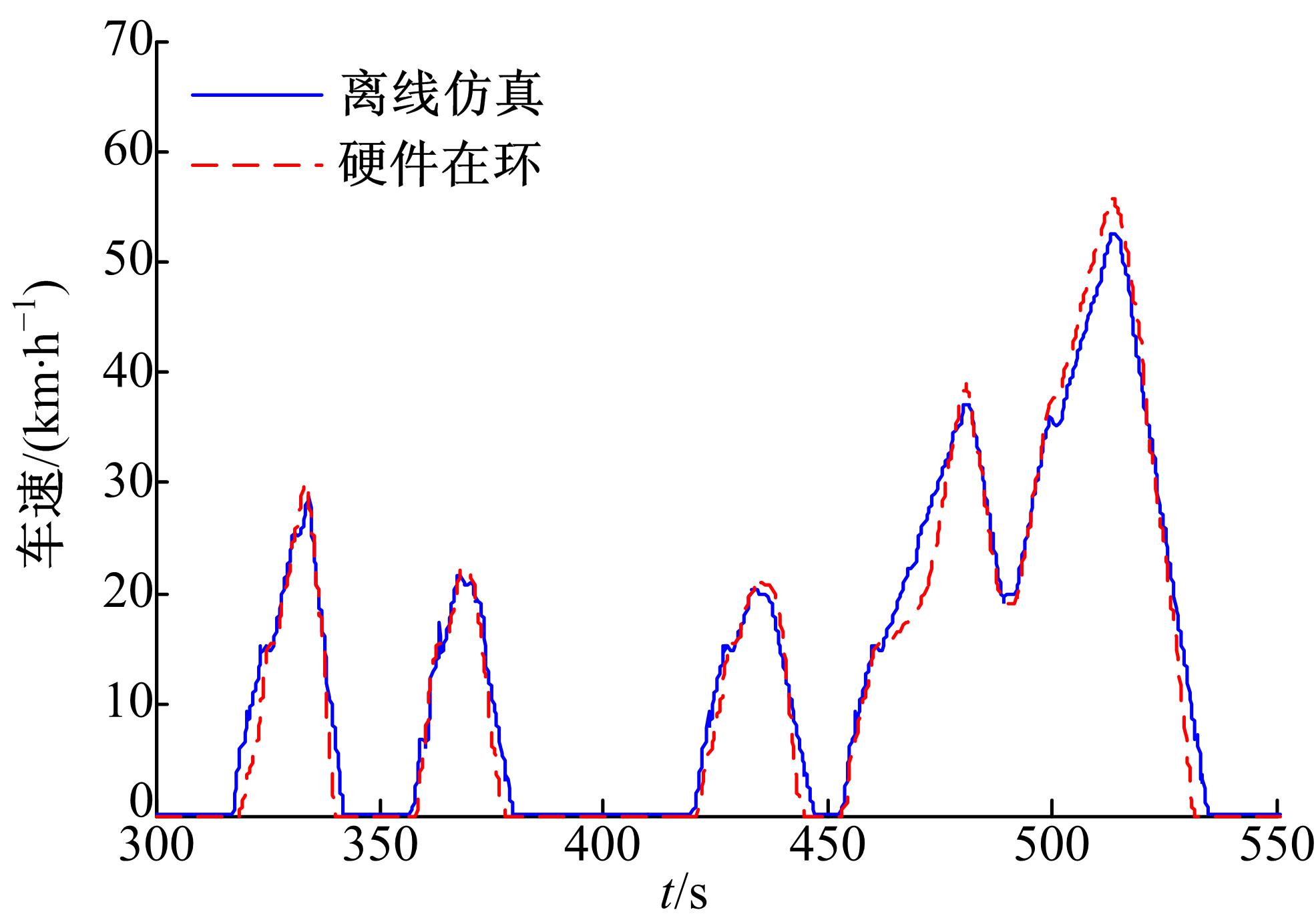 | 图12 车速曲线Fig.12 Velocity curve |
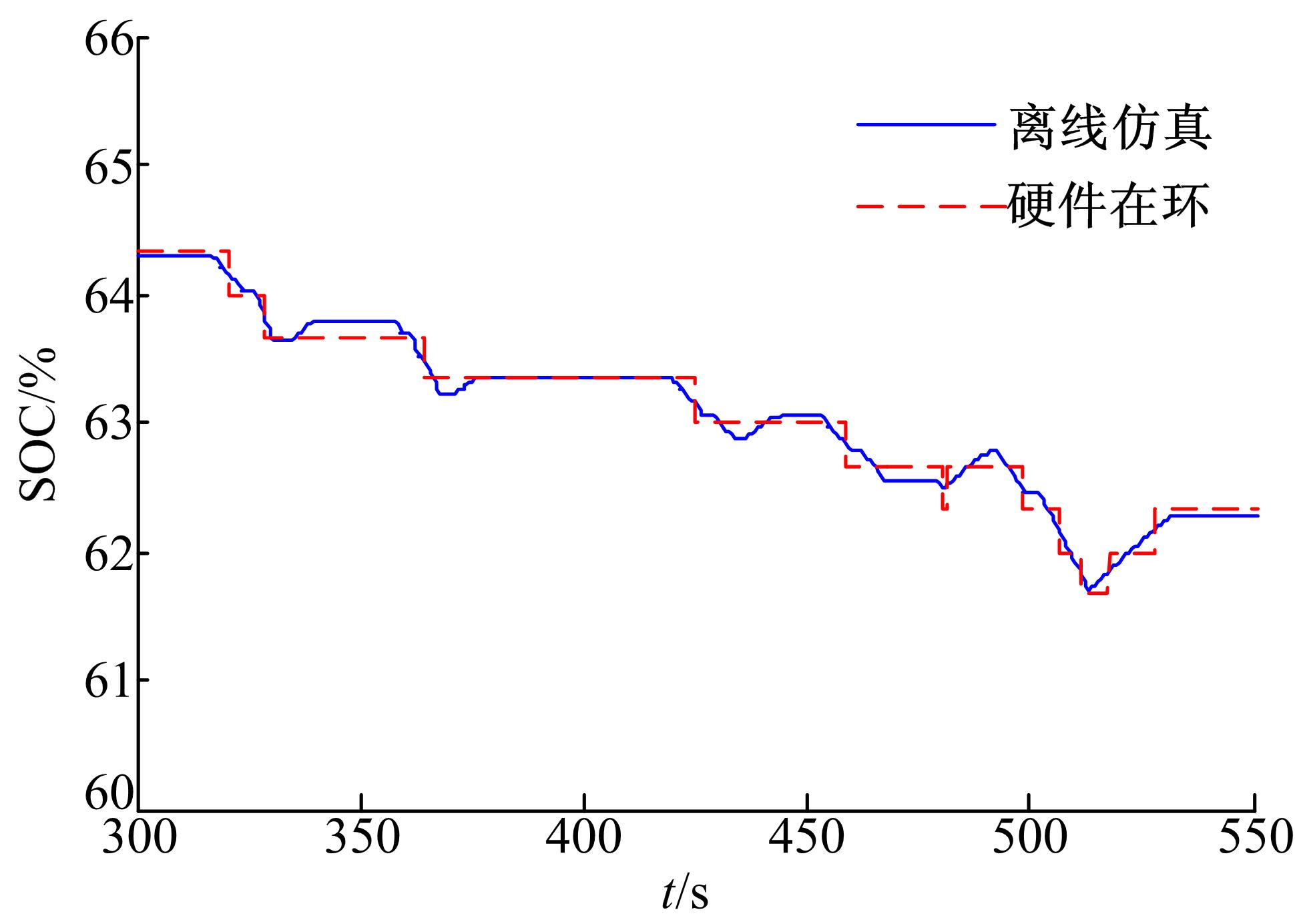 | 图13 电池SOCFig.13 Battery state of charge |
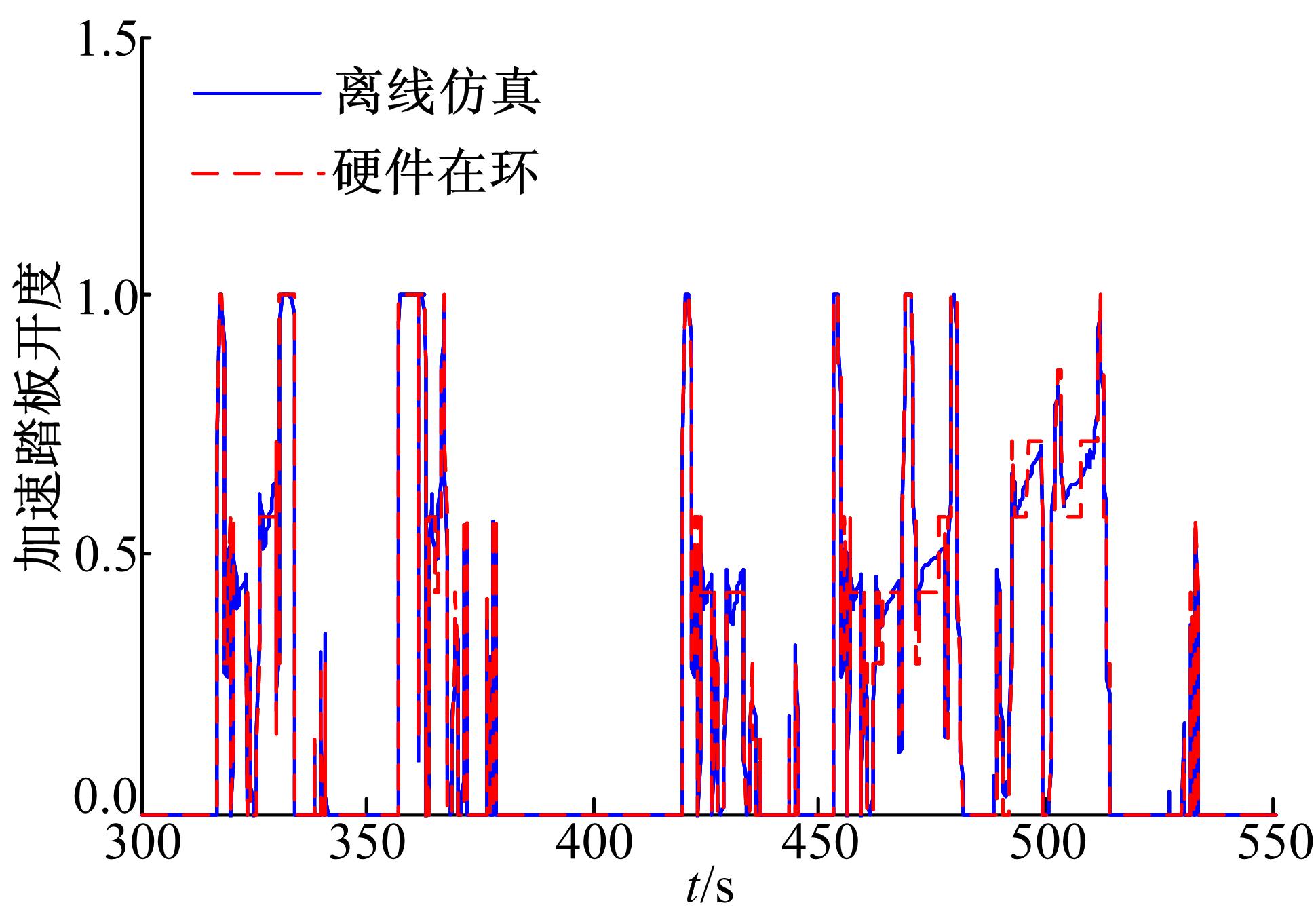 | 图14 加速踏板开度Fig.14 Accelerator pedal opening |
从图中对比曲线可知,离线仿真曲线与硬件在环试验曲线基本重合,误差较小,满足精度要求。为进一步了解能量管理控制策略下的发动机与电机运行状态,本文给出了国家标准城市工况下的发动机、M1电机以及M2电机的工作点统计图。
从图15可以看出,发动机大多数时间是运行在高效区域附近,而M1电机和M2电机的工作点因为需要调节发动机工作点而分布得较为分散,但总体来看其工作点大多数也落在合理的工作区域内。
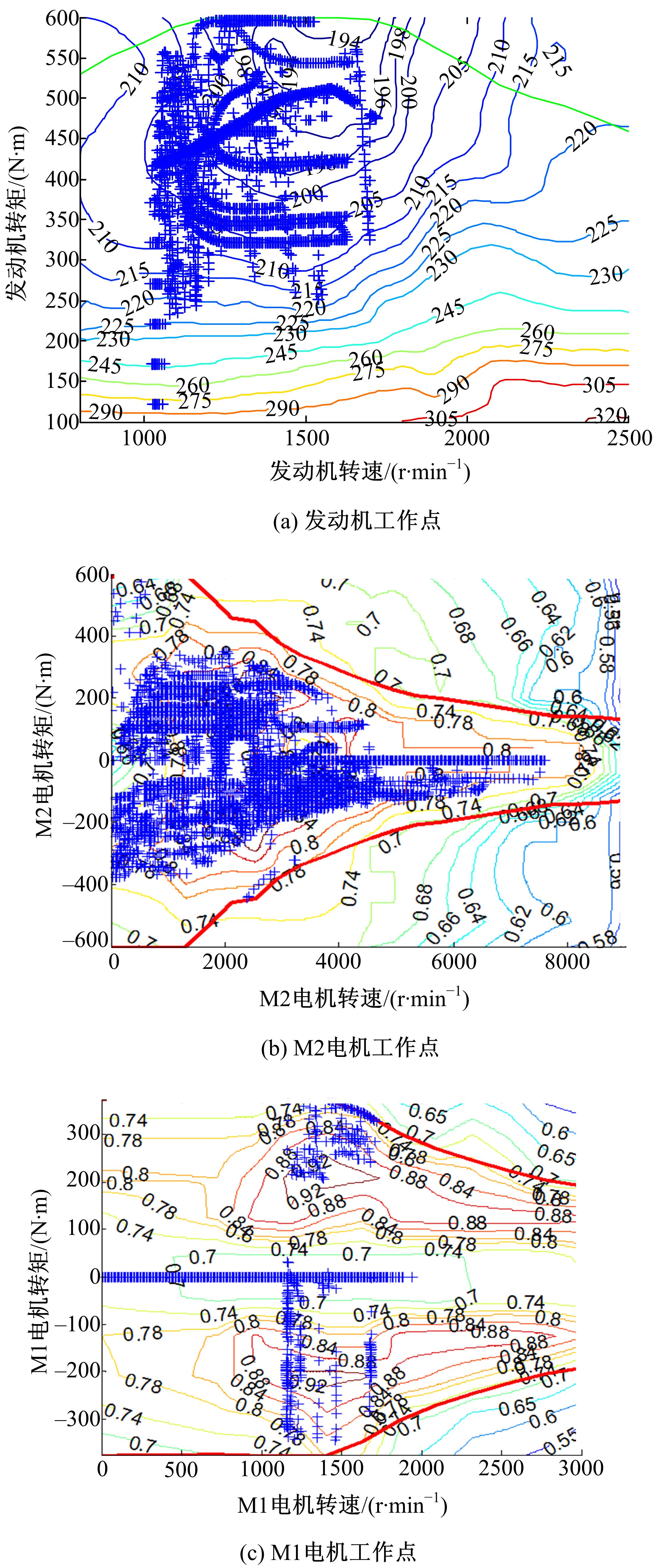 | 图15 发动机与电机工作点Fig.15 Engine and motor working points |
从试验曲线可知,整车控制策略实时性较好,CAN总线信号通讯正常。从表2对比结果来看,其误差基本上都控制在5.30%以内,验证了策略以及总线信号的合理性。
| 表2 混合动力客车仿真与试验结果 Table 2 Hybrid electric bus simulation and experimental results |
结合混合动力车辆的驱动模式设计整车能量管理控制策略,基于发动机最佳工作区域思想寻求发动机单独驱动的高效运行区域,从而对车辆的切换规则进行优化。设计了基于Stateflow的多模式能量管理控制策略,并进行了离线仿真与硬件在环实时试验,验证了其合理性。将建立的CRUISE仿真模型下载至dSPACE/Simulator仿真环境中,同时将控制策略模型下载到TTC200控制器中,利用CAN总线进行实时通讯模拟实车仿真环境。硬件在环试验结果表明:整车控制策略实时性较好,CAN总线通讯良好,为后续实车试验提供了良好的平台以减少实车试验的调试周期。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|