{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
车辆虚拟跟随避撞中驾驶人制动时刻模型
[高振海1, 2, 3  , 吴涛
, 吴涛1, 4 , 赵会2, 3 ]
, 吴涛, 赵会|
|


作者简介:高振海(1973-),男,教授,博士生导师.研究方向:汽车智能辅助驾驶系统.E-mail:gaozh.jlu@gmail.com
为探索跟随避撞中驾驶人制动时刻的影响因素,应用汽车驾驶模拟器对多名被试驾驶人进行虚拟交通情景下制动行为测试。利用采集的驾驶人在不同交通情景中制动时刻数据,分析了驾驶人制动时刻与其影响因素之间关系,提出了基于驾驶人采取全制动时刻的危险判断指标,分别建立了多元线性回归、BP神经网络驾驶人制动时刻模型,并对两者的预测性能进行对比。结果表明:驾驶人的年龄、性别和两车运动状态是影响驾驶人制动时刻的重要因素;建立的BP神经网络模型预测精度高于回归模型,可用于揭示驾驶人在跟随避撞中危险判断机理,为驾驶辅助系统开发提供了一个具有体现人的个体差异能力的车辆安全行驶状态判断指标,将对改善驾驶辅助系统性能具有重要意义。
To explore the impact factors of driver's braking moment in car following under emergency conditions, the virtual driving behavior tests of several drivers were conducted on a driving simulators. Based on the driver's braking onset data under different scenarios, the impact factors of driver's braking moment were analyzed, and a new threat assessment measure, time to maximum deceleration level braking, was proposed. This measure can directly quantify the danger or threat level of the current dynamic situation. Then two braking moment forecasting models were established by applying linear regression and BP neural network respectively. Results show that the driver's age and gender, the motion state between two cars are the important impact factors. Comparisons show that the BP neural network forecasting model predicts more accurately, that is in agreement with the human natural judgment on the urgency and severity of threat.
交通安全已成为现代社会面临的严峻问题[ 1]。事故统计表明[ 2],车辆追尾碰撞事故相对于其他的碰撞事故而言占有很高比例,而驾驶人操作失误是引发此类事故的主要原因。碰撞预警系统能够根据系统传感器得到道路前方信息,在做出追尾碰撞可能性很高的判断后,给驾驶人发出劝告或报警信息,提醒驾驶人注意规避危险,有效避免追尾事故。正确的车辆安全行驶状态判断是合理预警策略制定的基础,因此,从碰撞预警系统有效性出发,车辆安全行驶状态判断应以多数交通情况下驾驶人的驾驶特点作为理论依据,并且要对跟随避撞中驾驶人制动行为进行深入研究。由于不同的驾驶人对跟随安全车距、危险判定有着不同的衡量标准,因此建立的车辆安全行驶状态判断依据必须具备体现人的个体差异能力,使碰撞预警系统能满足不同驾驶人的个性化特征或特殊需求,降低误警率,促进碰撞预警系统发展及完善,提高交通效率和交通安全。
现有的车辆安全行驶状态判断研究多是依据车辆运动状态来描述车辆在跟随工况下的危险程度,国内外学者提出了包括基于碰撞时间[ 3, 4]、安全距离[ 5, 6]和减速度[ 7, 8]在内的多个追尾碰撞危险程度判断模型,但较少考虑驾驶人的个体特征(如性别、年龄等),且难以体现驾驶人制动行为个体差异。而实际上,驾驶人对碰撞危险程度判断并非简单的与碰撞时间、安全距离及车辆运动状态呈线性关系,因此,本文提出一个新的碰撞危险判断指标,可直接量化当前车辆安全行驶状态水平,并能客观评估追尾碰撞危险程度。利用汽车驾驶模拟器作为虚拟交通情景再现及驾驶行为记录试验平台,通过采取嵌入真实驾驶人的模拟器试验,获得多名驾驶人在多种交通情景中制动时刻相关数据,根据提出的基于驾驶人全制动减速时刻的碰撞危险判断指标,分析不同驾驶人在跟随避撞中以常规制动时刻下该指标差异及其与影响因素之间的关系,分别建立了驾驶人常规制动时刻的多元线性回归模型和BP神经网络模型,通过两者预测性能对比,验证了建立的BP神经网络危险判断模型具有较好适用性。
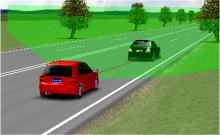
本文的研究目的是探索在跟随避撞工况下不同驾驶人采取的制动行为特性,而试验工况选取应具有典型性及全面性。通过相关交通事故统计得知,在直道上发生追尾碰撞事故的比例约占总事故数的94%,且在该过程前车多处于减速行驶,约为80%[ 9]。基于此,考虑在直道上前方目标车辆处于不同运动状态设计了3个典型试验场景,其车辆虚拟跟随碰撞情景如图1所示。
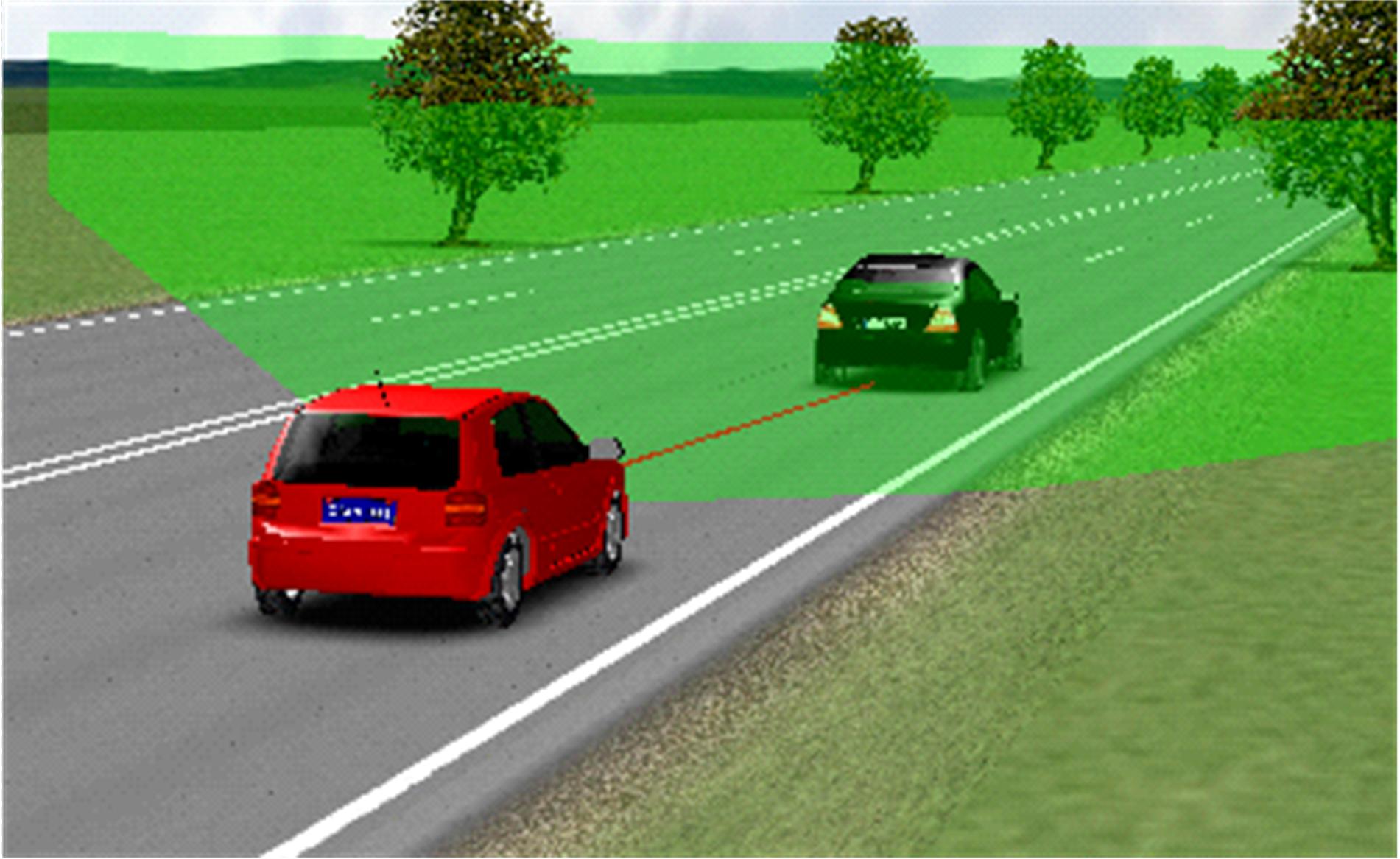 | 图1 车辆虚拟跟随碰撞情景Fig.1 Virtual car following collision avoidance scenes |
场景1 接近静止的前车工况。前车静止在距离本车出发点1.2 km处,本车初始以试验设定车速行驶,然后保持该车速巡航,试验中本车巡航车速范围为40~100 km/h。当本车行驶至接近静止前车时,驾驶人需要按照试验减速要求采取制动操作,避免与前车发生碰撞。本场景模拟的是运动的本车接近静止的前车的简单场景,在该场景下碰撞事故容易发生。
场景2 接近低速前车工况。本车初始以试验设定车速行驶,然后保持该车速巡航,试验中本车巡航车速范围同上。当本车行驶至1.1 km时,前方出现车速低于本车的匀速行驶的前车,前车车速分别低于本车车速5、10、15、20 km/h,在本车逐渐接近前车过程中驾驶人需要按照试验减速要求采取制动操作,避免与前车发生碰撞。本场景模拟了运动的本车接近低速行驶的前车的典型城市和高速路交通场景,在该场景下,由于车速较高,相对速度较大,易发生追尾碰撞事故。
场景3 接近减速行驶的前车工况。本车驾驶人控制汽车从初始车速零加速行驶,车速可以自由控制。行驶一段时间后,本车将追赶上前方匀速行驶的车辆。然后,要求本车跟随前车行驶,当两车的车速相同,且以车头时距稳定行驶时,前车将以不同的减速度减速停车,减速度范围为-0.7~-2.5 m/s2。此工况模拟车辆跟随行驶过程中,由于前车驾驶人采取制动所引起的异常减速高危工况,该场景在高速公路上较普遍,由于车速较高,相对距离较小,一旦前车采取制动,倘若本车驾驶人反应不及时,则易发生追尾碰撞事故。
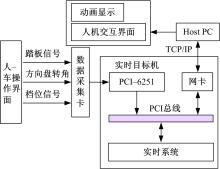
试验过程中以固定式汽车驾驶模拟器作为虚拟交通情景再现及驾驶行为记录试验平台,硬件组成包括主机、NI实时目标机、多功能数据采集卡、制动/油门踏板、挡位机构和转角编码器,其系统结构如图2所示。该平台能够根据驾驶人的操作,通过显示屏向驾驶人实时展示动态交通场景,并同步采集驾驶人的加速/制动踏板、方向盘、档位等操作数据。
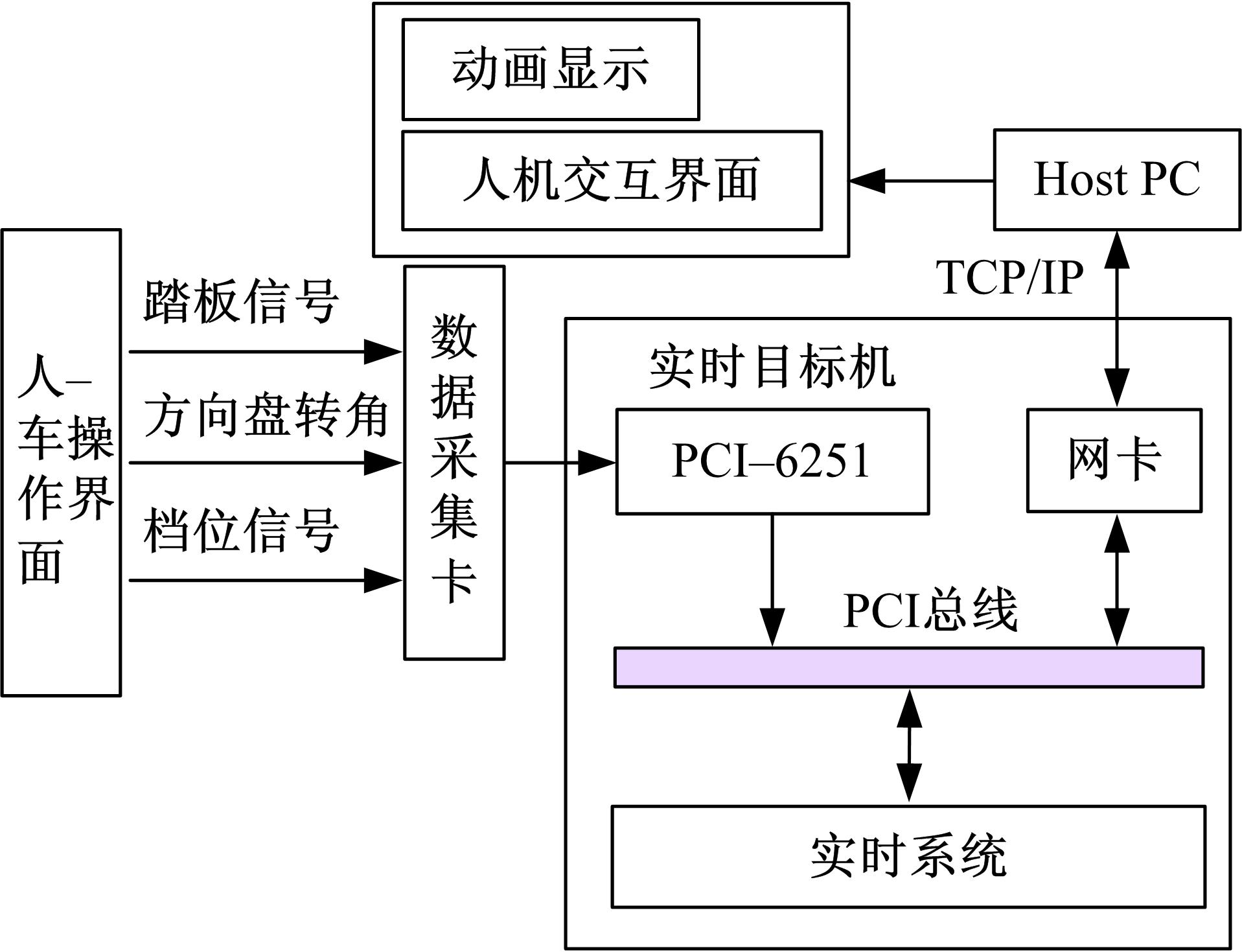 | 图2 固定式汽车驾驶模拟器系统结构Fig.2 Driving simulator system architecture |
试验征召51名拥有驾照的成年人作为被试驾驶人。年龄在18~60周岁,均拥有2年以上驾龄,无影响驾驶行为的生理、心理等疾病以及嗜酒等不良嗜好,被试驾驶人样本结构如表1所示。
| 表1 被试驾驶人样本结构 Table 1 Samples structure of tested driver |
在试验开始之前,需全面检查驾驶模拟平台软硬件,并对被试人员进行信息登记和培训。试验过程中,要求3种工况下不同运动参数的各试验场景每名驾驶人重复试验多次,且保证在接近前车过程中,被试驾驶人自己判断危险,并按照要求采取常规制动或全制动来分别完成相同场景下的避撞操作,并记录相同场景下每个驾驶人分别采取常规制动和全制动合理完成避撞操作的两组数据。
距全制动减速时间 Tmdl是一个基于驾驶人采取全制动减速避撞时刻的碰撞危险判断指标。 Tmdl的提出是假设在跟随避撞过程中,前车正在以一定减速度 ap减速,并保持这一减速状态甚至停车,而在此过程中本车先保持原始状态不变,直至行驶到最后时刻才采取制动,而在此制动时刻驾驶人只能以本车最大减速度 afmax制动才能有效避免碰撞。利用该制动时刻作为基准时刻,逆时序分析车辆当前时刻到未来基准时刻的剩余时间,通过该时间来直接量化当前车辆安全行驶状态水平,并客观评估碰撞危险程度。因此, Tmdl描述本车保持当前运动状态不变,此时距离驾驶人为避免与前车发生追尾碰撞选择采取最大减速度制动时刻所剩余时间。该时间指标对驾驶人制动行为不敏感,但与车辆最大制动性能有关, Tmdl的表达式如下:
式中:
在实际开车过程中,驾驶人为避免与前车发生碰撞很少采用全制动,往往是以个人偏好采取常规制动,除非处于极危险工况。但这种个人偏好又导致不同驾驶人在处置同一碰撞危险工况所采取的常规制动行为存在差异,为分析不同驾驶人这种制动时刻差异及其与影响因素之间的关系,根据上述危险判断指标,对试验数据进行处理。
在被试驾驶人进行试验过程中,驾驶模拟器主机每隔0.l s记录一次试验场景中所有变量数据。当试验结束后,输出此试验所存储的数据,包括:常规制动时刻或者全制动时刻、两车状态信息等。本文需要根据相同场景下驾驶人分别采取常规制动、全制动时刻数据,计算两者时间差作为驾驶人为避免发生追尾碰撞采取常规制动时刻距离驾驶人采取最大减速度制动时刻所需要的提前时间,用 Tmdl_nor表示,统称为驾驶人制动时刻。
2.2.1 驾驶人年龄和性别
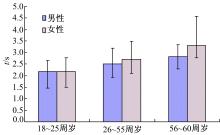
根据年龄,将被试驾驶人分为3个群体,群体1为18~25周岁,群体2为26~55周岁,群体3为56~60周岁。然后将各驾驶人制动时刻数据按照不同群体及性别进行分组统计,结果如图3所示。
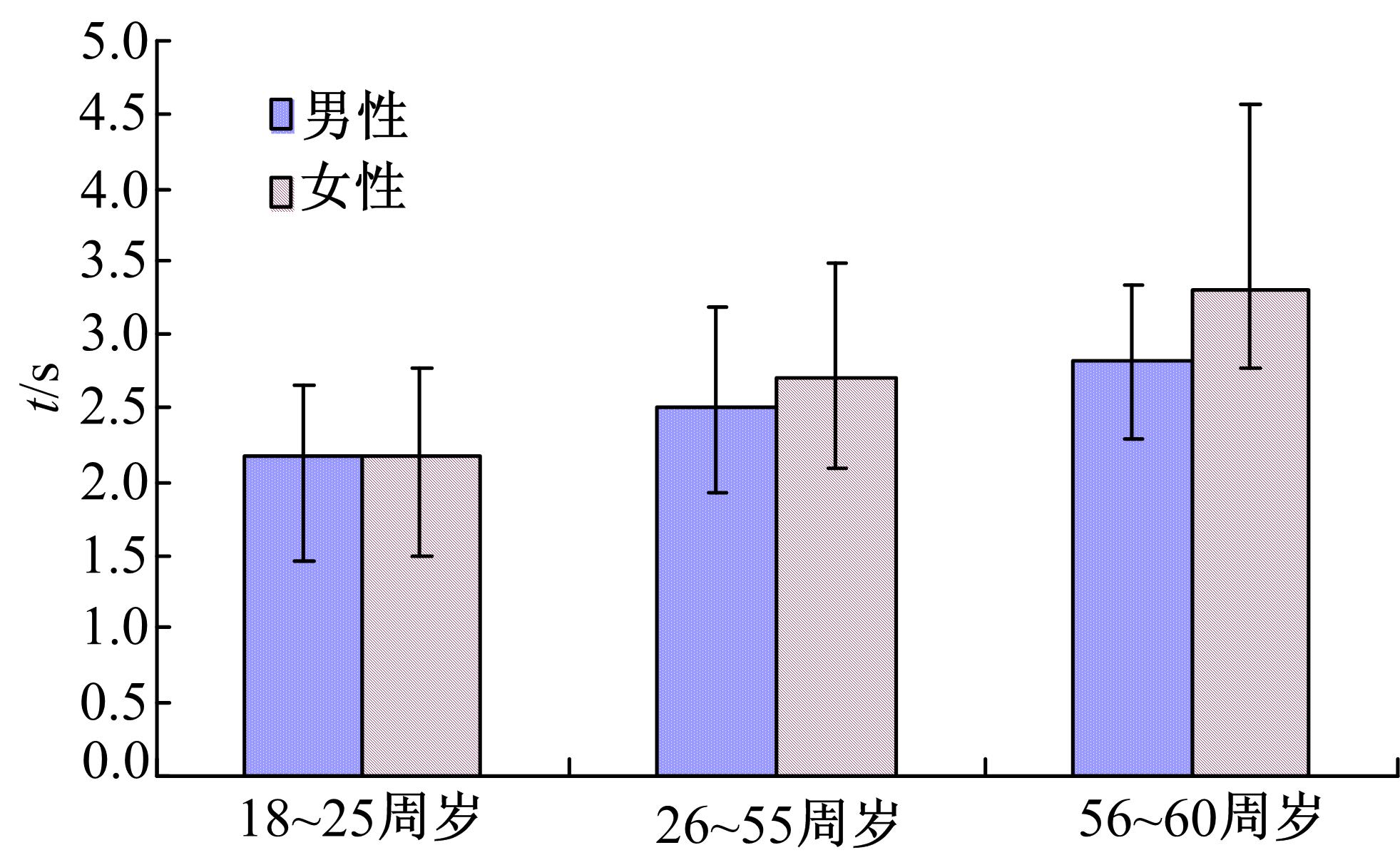 | 图3 不同群体及性别的驾驶人制动时刻Fig.3 Braking moment of different age and gender groups |
结合图3可知,3个群体的制动时刻平均值均在2~3.5 s,其中群体1的制动时刻最短,群体3的制动时刻最长,而从制动时刻波动幅度来看,群体1和2的波动幅度差不多,但均小于群体3。这表明群体1、群体2的危险判断能力相当,均较为稳定,而群体3的危险判断能力波动最大。但群体1相对于群体2而言,前者判断危险后的反应最快,同样可知,群体3判断危险后的反应最慢。根据各群体之间差异,分析出现上述分布的原因在于群体1为年轻驾驶人,视力、精神状态和反应能力都处于最佳阶段,当判断危险后为保障安全会迅速踩制动减速,通常动作过猛过快,制动力过大,使得减速时间最短。而随着年龄的增长,驾驶人各项生理机能下降,可能导致其危险判断能力下降和判断出危险后的反应变慢。
将3个群体中男性和女性的制动时刻平均值比较可知,各群体中女性的制动时刻平均值都高于男性驾驶人;通过群体1、2中男性和女性驾驶人制动时刻比较,不同年龄段同一性别的驾驶人制动时刻波动幅度相当,而群体3中,男性驾驶人制动时刻波动幅度最小,女性驾驶人制动时刻波动幅度最大。试验测试中,被试驾驶人制动时刻最大值也出现在群体3的女性中。分析出现上述情况的原因是由于女性驾驶人心思更缜密,保守心态引起制动时刻略微高于男性驾驶者;但波动幅度相当,说明女性驾驶人具有稳定的危险判断能力,同样能够胜任男性驾驶人可以完成的驾驶任务。群体3中的驾驶人有多年的驾车经历,因此具有较强的处置危险的应急本领,制动时刻波动最小,其中女性驾驶人的波动下限较小,说明同男性驾驶人的危险判断能力相当,但上限波动幅度大,这可能是由于大龄女性在年龄、生理和心理多方面的影响下,导致其驾驶能力异常。
2.2.2 本车车速
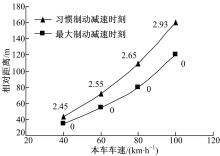
利用接近静止前车工况试验数据,绘制本车车速、相对距离与制动时刻之间的关系曲线如图4所示。图中相对距离位置点是根据同一本车车速工况下测得的驾驶人分别采取不同减速度制动时刻的相对距离数据求得的平均值,包括采取常规制动力和最大制动力。在试验过程中,选取本车车速分别为40、60、80、100 km/h。从图中习惯制动减速时刻曲线可以看出,随着车速增加,驾驶人制动时刻呈现出一定的增大趋势,采取习惯制动减速时刻距离采取最大制动减速时刻的时间晚2.6 s左右。这表明,若预警系统依据此时刻预警,则当驾驶人接到危险预警信息后,其距离采取最大制动力减速时刻还剩2.6 s。
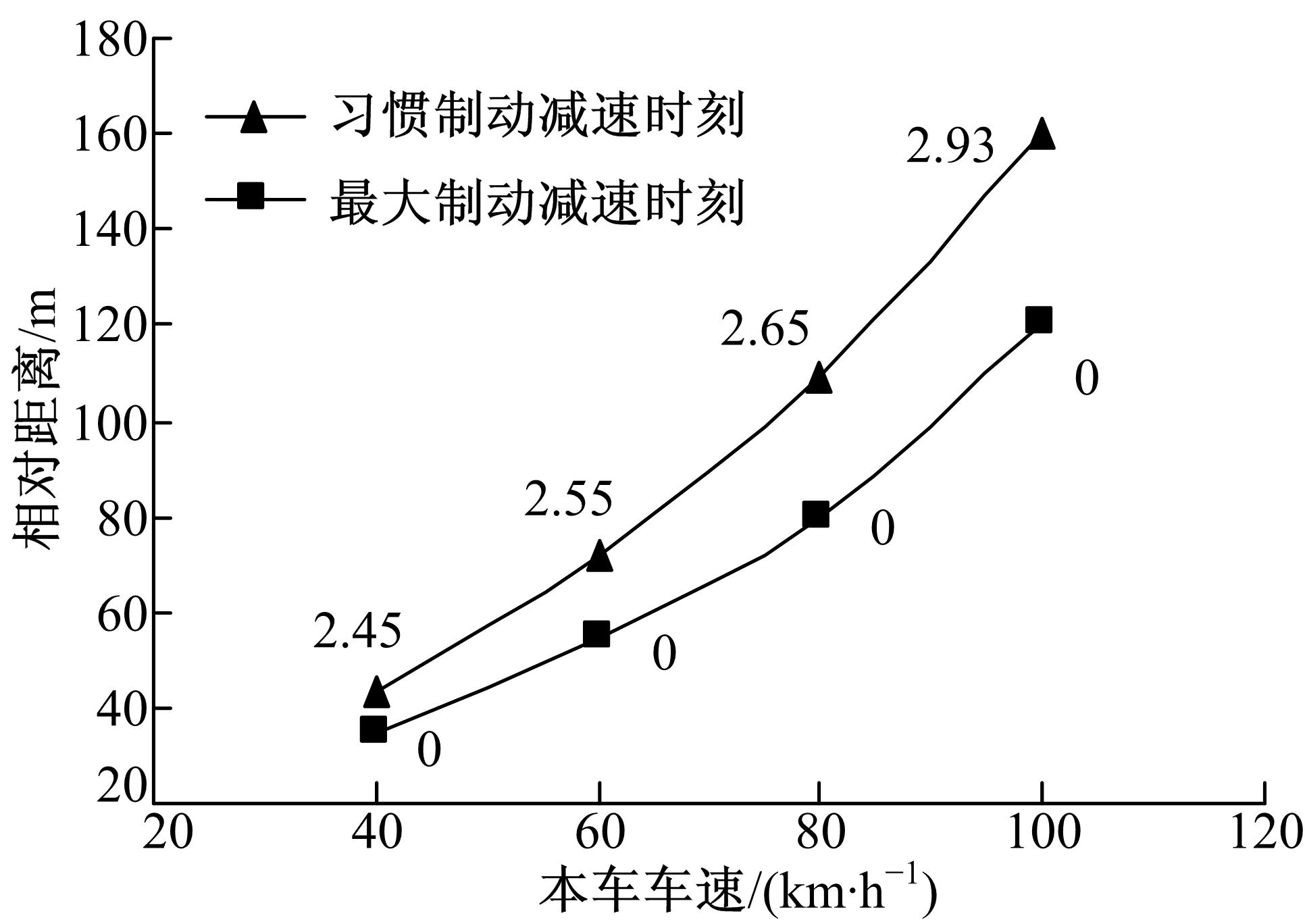 | 图4 本车车速、相对距离与制动时刻关系曲线Fig.4 Curves between braking moment and vehicle speed,relative distance |
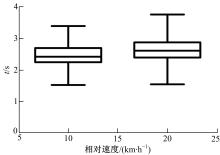
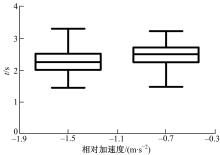
2.2.3 相对速度和相对加速度
利用接近低速前车工况,绘制相对速度与制动时刻的数据关系如图5所示,并得出相对加速度与制动时刻的数据关系如图6所示。由图5、图6可知,随着相对速度、相对加速度的增加,驾驶人制动时刻呈现出一定的增大趋势。为了说明相对速度、相对加速度与制动时刻之间是否存在相关性,采用皮尔逊检验对样本中相对速度、制动时刻数据进行相关性分析,结果见表2。
 | 图5 相对速度与制动时刻之间的数据关系Fig.5 Braking moment of different relative velocity |
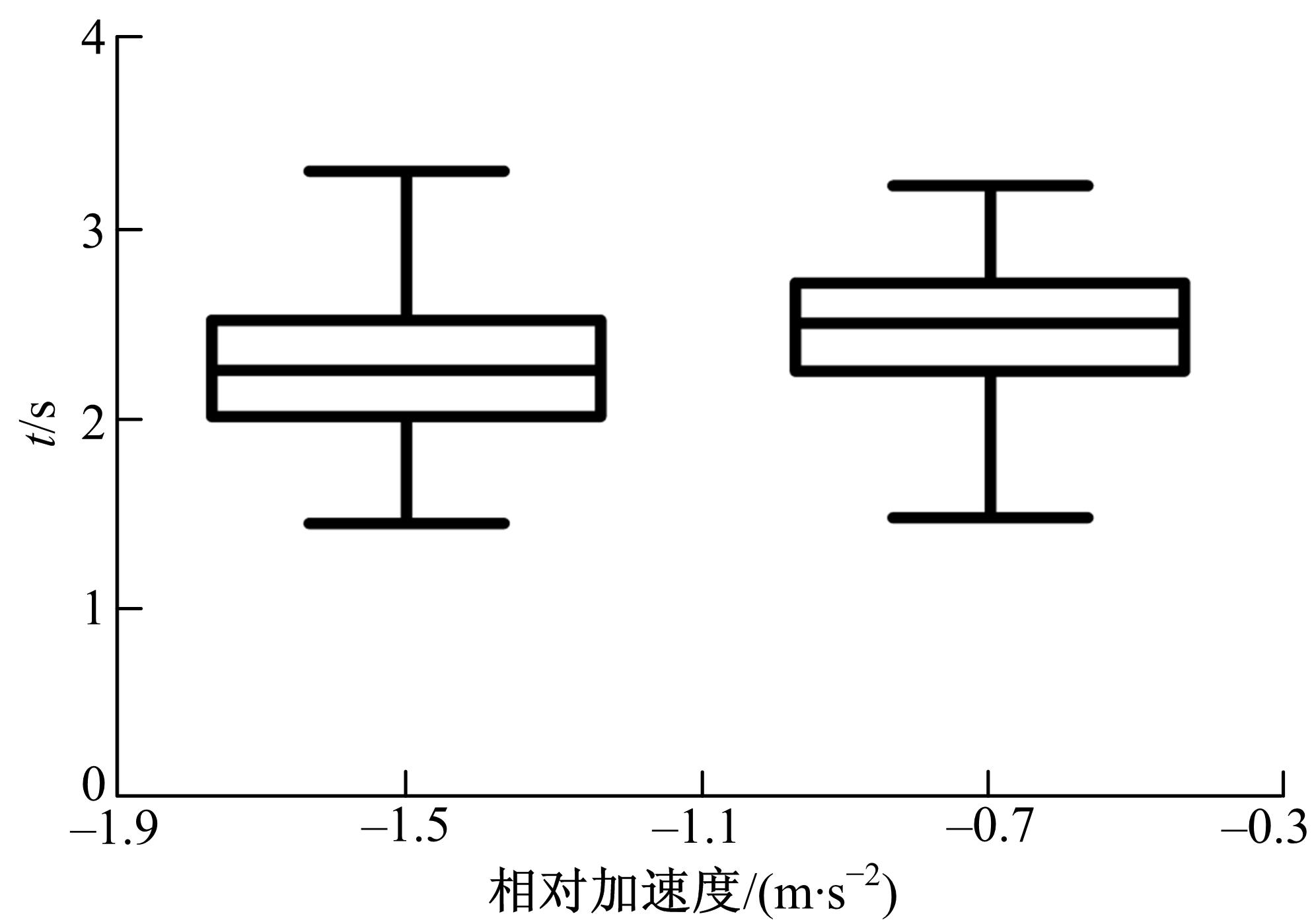 | 图6 相对加速度与制动时刻之间的数据关系Fig.6 Braking moment of different relative deceleration |
| 表2 相对速度与制动时刻的皮尔逊检验 Table 2 Pearson test for relative velocity and braking moment |
表2表明,相对速度与制动时刻之间的相关系数为0.396,在0.01水平上显著相关,说明相对速度与制动时刻这两者之间存在函数关系。由于相对加速度是利用相对速度变化率估算求得,所以相对加速度与制动时刻也存在一定关系。
回归分析是确定两种或两种以上因素间定量关系的一种统计分析方法,应用广泛。本文将试验数据进行随机重组,构成回归组和验证组。选取驾驶人年龄、性别、本车车速、相对速度、相对加速度作为自变量,在SPSS中选用STEPWISE法进行回归。其中驾驶人性别、年龄为分类变量,这里用0和1分别表示女性、男性;用1、2、3分别代表3个群体,得到回归系数如下:常数为1.852,年龄为0.435,性别为-0.082,本车车速为0.006,相对速度为-0.003,相对减速度为0.17。对上述结果进行方差分析,输出结果见表3。可以看出方差分析的显著性概率值小于0.001,说明自变量与因变量之间有着显著的线性关系。
| 表3 方差分析 Table 3 Variance analysis |
驾驶人制动时刻多元回归模型为:
式中:Age、Gender为驾驶人的年龄、性别。
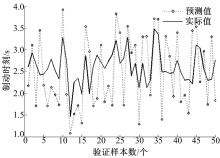
为检验模型预测效果,将建立的回归模型对验证组进行预测,并与实际值比对,如图7所示,由预测值和实际值可得均值误差为0.6949,说明回归模型具有一定的预测能力,但预测精度不高。
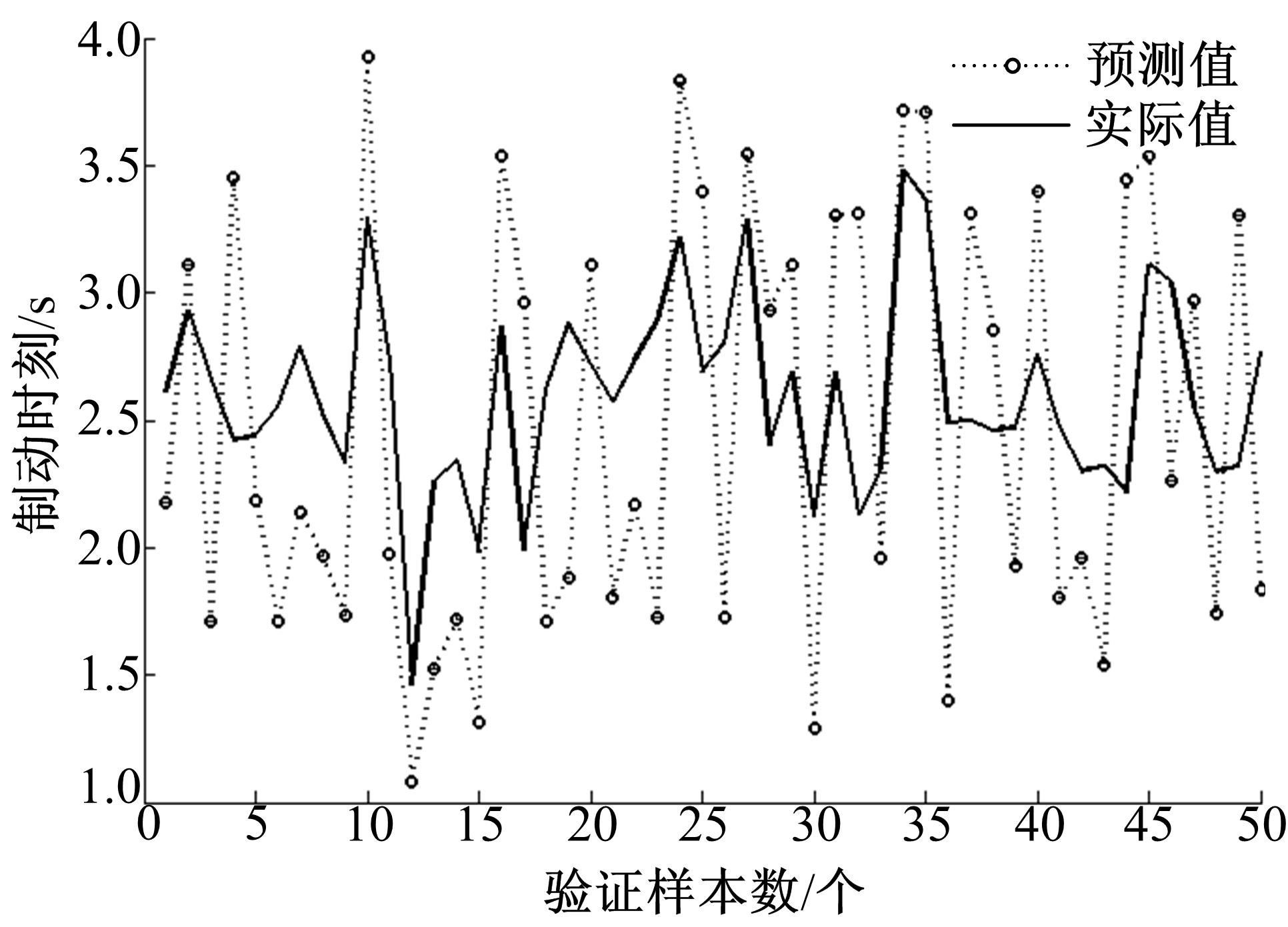 | 图7 回归模型预测值与实际值比较Fig.7 Regression model predicted value and the actual value |
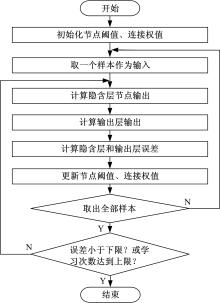
由于跟随避撞中车辆行驶状态及变化趋势具有一定的复杂性,且驾驶人应对碰撞危险的判断决策与正常驾驶过程存在一定差异,使得在多种因素干扰下其所采取的制动行为具有非线性,显然利用回归分析方法难以实现有效预测。而神经网络是由大量的、简单的神经元广泛地相互连接而形成的复杂网络系统,它无需预先建立模型,而是以试验数据为基础,经过有限次迭代计算来挖掘试验数据的内在规律,适用于非线性系统研究[ 10]。因此,采用BP神经网络对制动时刻进行预测,其实现步骤如图8所示。
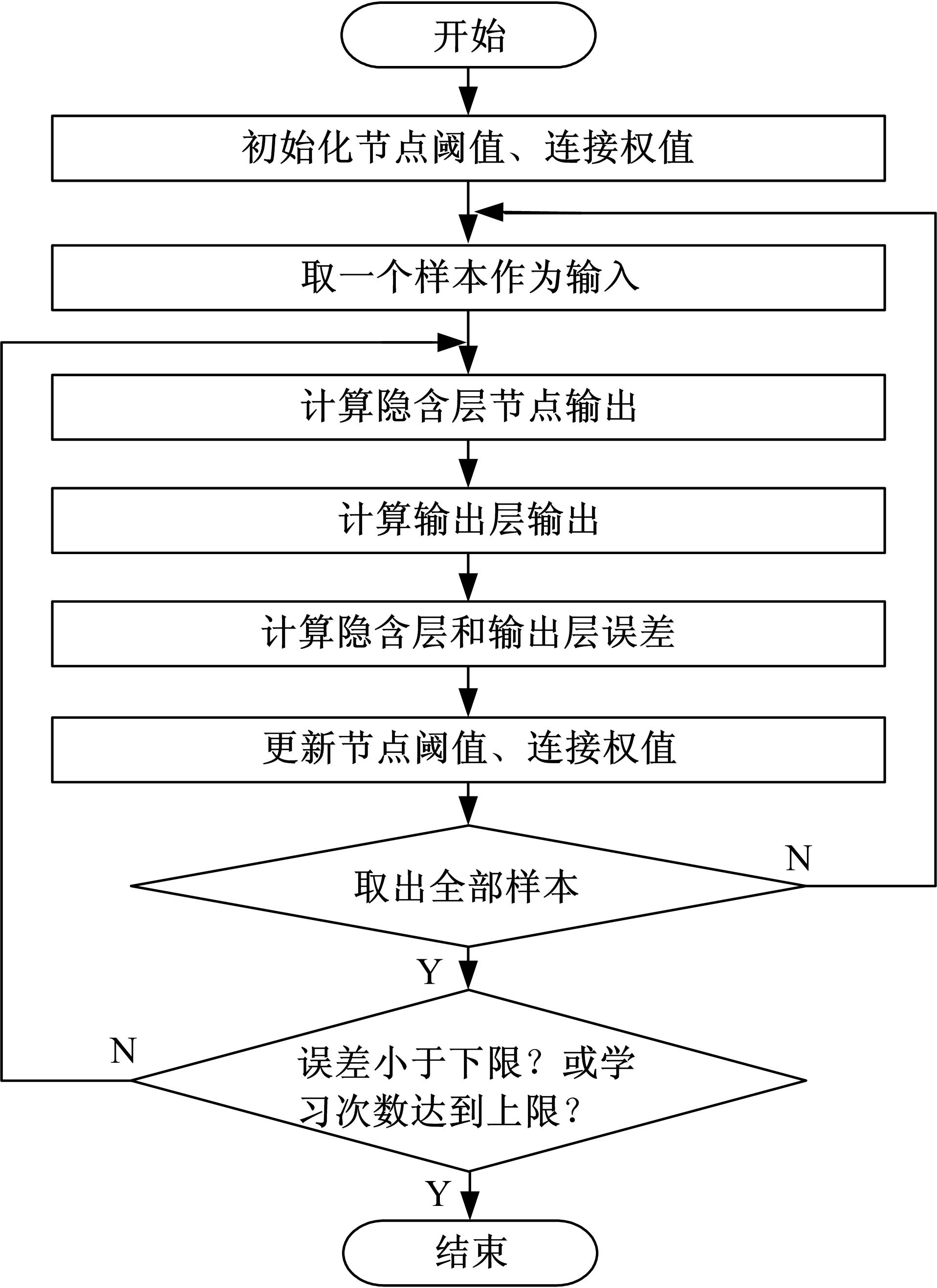 | 图8 制动时刻BP神经网络算法流程图Fig.8 Braking moment BP neural network algorithm flowchart |
本文采用典型的三层BP神经网络结构,包含输入层、隐含层和输出层。输入层主要为制动时刻的影响因子层,包括驾驶人年龄和性别、本车速度、相对速度和相对加速度5个输入数据节点;输出层仅包括驾驶人制动时刻观测值1个输出节点;隐含层数据节点主要是根据经验公式和网络训练效果进行选定。本文通过设计遍历程序,在结果中选择步数与误差均较优的隐含层节点数。即假设
网络训练参数同样对BP网络的训练和模型精度具有重要影响。通过反复调整和比较模型训练误差方式进行确定,所建立的BP神经网络训练目标为0.01、学习速率为0.1、最大训练次数为800、初始输入层至隐含层及隐含层至输出层的权值均设为0.5,隐含层及输出层节点阈值分别设为0.8和0.1,隐含层和输出层传递函数选取Sigmoid函数,分别为S型tansig和S型logsig。上述整个过程在Matlab中实现,利用从试验数据中分离出的训练和检测样本,应用该软件提供的神经网络工具箱,通过编写程序和调用相关函数,实现该BP神经网络、网络训练参数设定与调整、输入层样本数据预处理、网络训练等,并进行预测模型准确性分析。
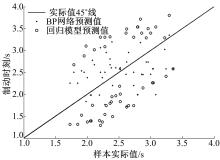
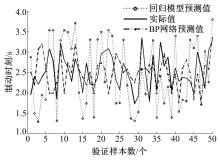
为分析BP网络和回归模型的预测能力,从试验数据中随机选取50组测试样本,对两者的预测结果与实际值进行比较,分别得到图9、图10。其中图9是样本实际值与BP神经网络、回归模型预测值的拟合图,如果点落在45°线上表明预测点与实际值相同,此时预测精度最高,而越靠近45°线表明预测越准确,反之预测误差越大。显然,建立的制动时刻BP神经网络模型预测精度高于回归模型。图10为样本实际值与BP神经网络、回归模型预测值分布图。由图中可直观地看出每组回归模型预测值与实际值差别较大,而BP神经网络预测值与实际值较接近。
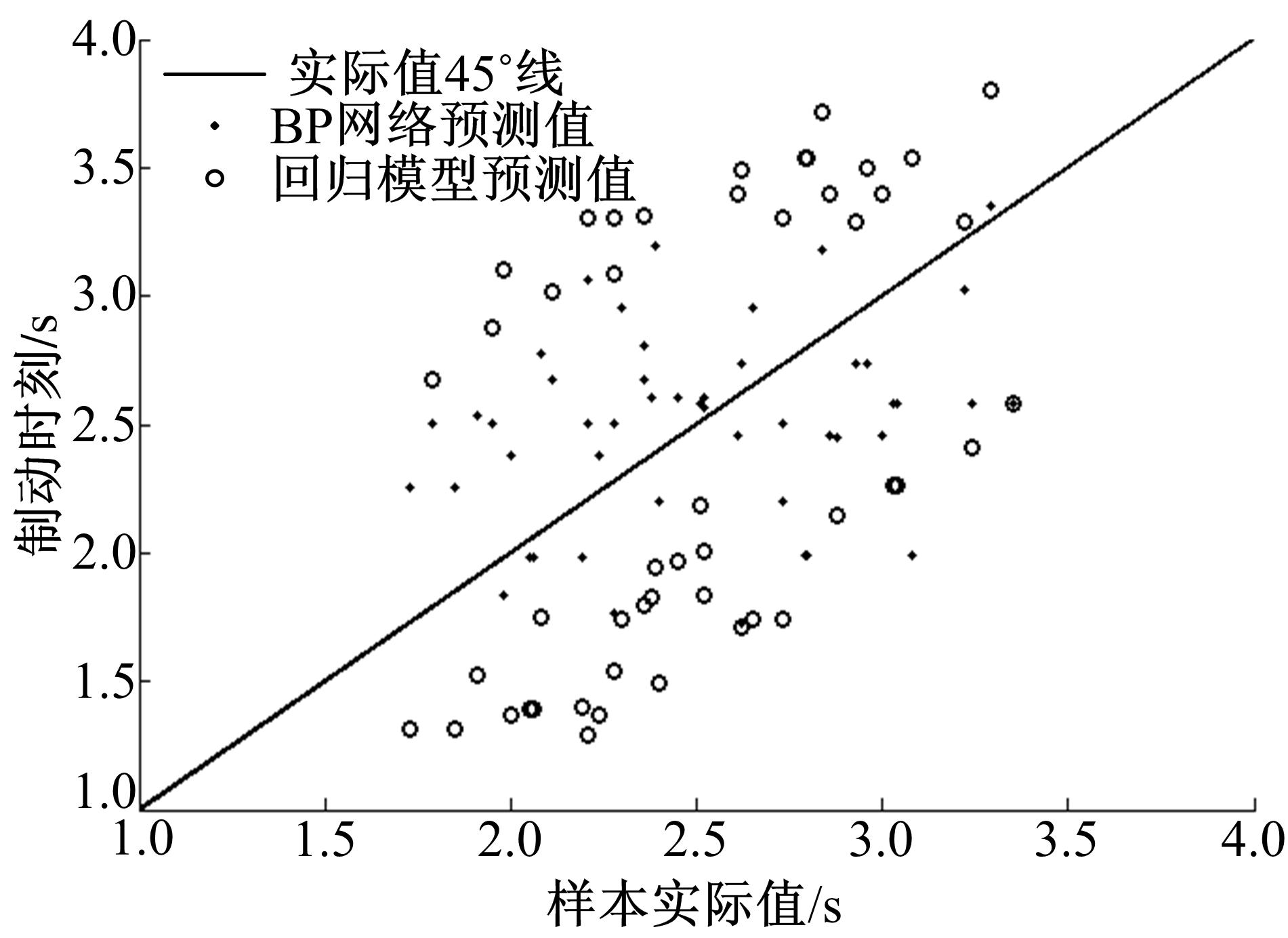 | 图9 实际值与预测值45°线对比图Fig.9 45 degree line comparison chart |
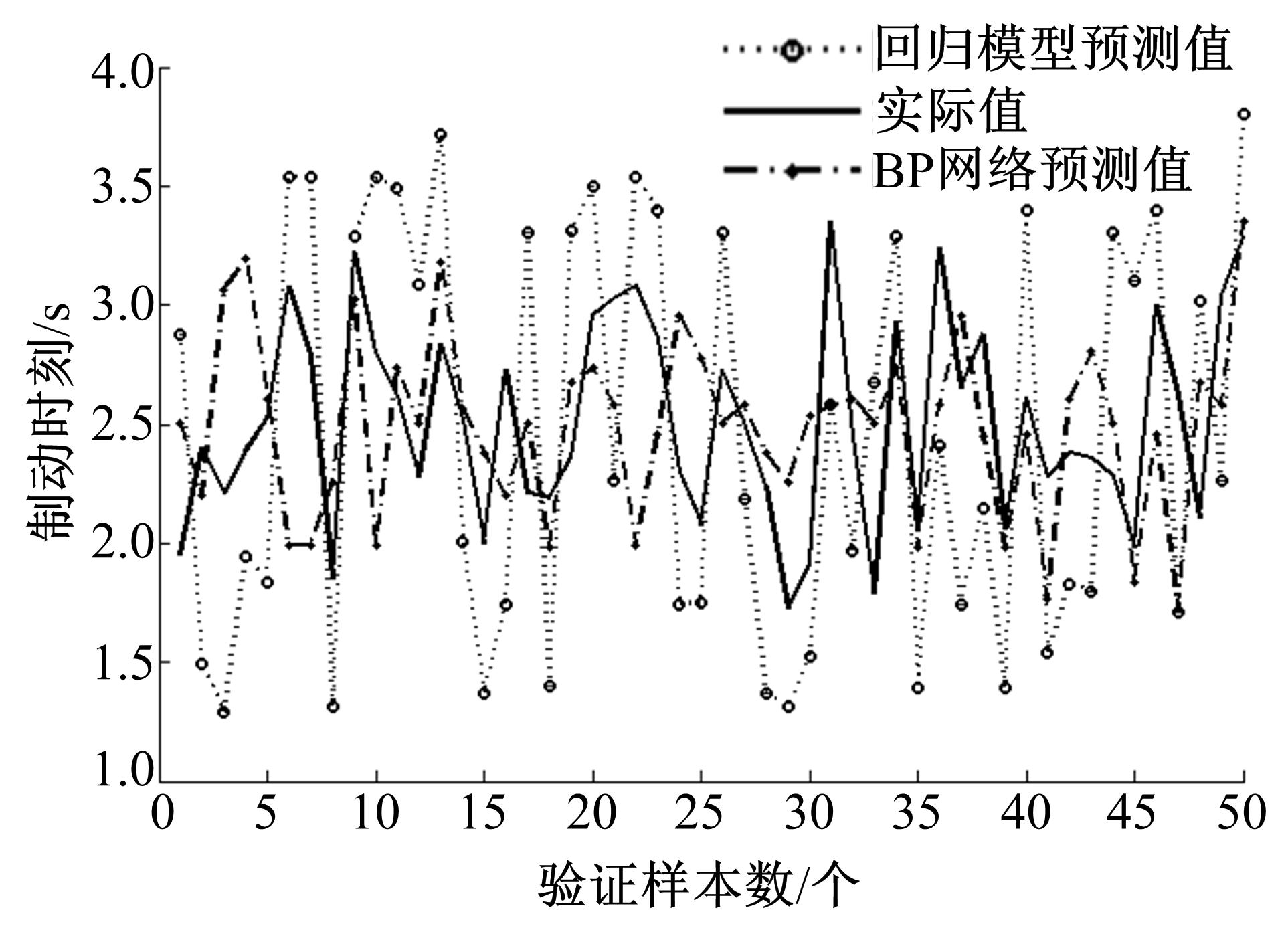 | 图10 实际值与预测值分布图Fig.10 Distributions of actual and predicted values |
为检验模型的预测精度,采用平均相对误差绝对值MAPE、预测误差标准差SDE两个指标来评价模型的预测效果。计算表达式分别为:
式中:
对前述50组测试样本预测效果进行比较,如表4所示。通过从回归模型和BP神经网络预测结果图和表中可以看出,BP神经模型预测精度高于回归模型,预测结果较可靠,能较好地预测出不同驾驶人的制动时刻。
| 表4 制动时刻模型的预测效果对比 Table 4 Prediction effect comparison of the prediction models for braking moment |
提出一个基于全制动减速时刻的危险判断指标,依据当前距离驾驶人采取全制动减速避撞操作所剩时间作为量化车辆安全行驶状态水平和客观评估追尾碰撞危险程度的衡量标准。通过驾驶模拟器平台获得的典型跟随避撞工况下多名驾驶人不同制动操作时刻相关数据,根据上述指标,分析了驾驶人常规制动操作时刻差异与驾驶人年龄和性别、本车速度、相对速度和相对加速度的关联,利用多元线性回归和BP神经网络建立了可表征驾驶人制动行为个体差异的制动时刻模型,采用MAPE和SDE对模型的预测精度进行检验。结果表明:驾驶人年龄和性别、本车速度、相对速度和相对加速度是影响驾驶人制动时刻的重要参数,建立的驾驶人制动时刻BP神经网络预测精度高于回归模型,预测能力较好,可用于揭示驾驶人在跟随避撞中危险判断机理,为开发驾驶辅助系统提供一个具有体现人的个体差异能力的车辆安全行驶状态衡量标准,对改善驾驶辅助系统性能具有重要意义。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|