基于最优控制理论的智能车辆轨迹生成方法
 , 李舜酩, 赵万忠
, 李舜酩, 赵万忠Optimal control theory based trajectory generation method for intelligent vehicle
LI Ai-juan1, 2 , LI Shun-ming2 , ZHAO Wan-zhong2 , SHEN Huan2 , JIANG Xing-xing2 , QIU Xu-yun1 , WANG Hui-jun1
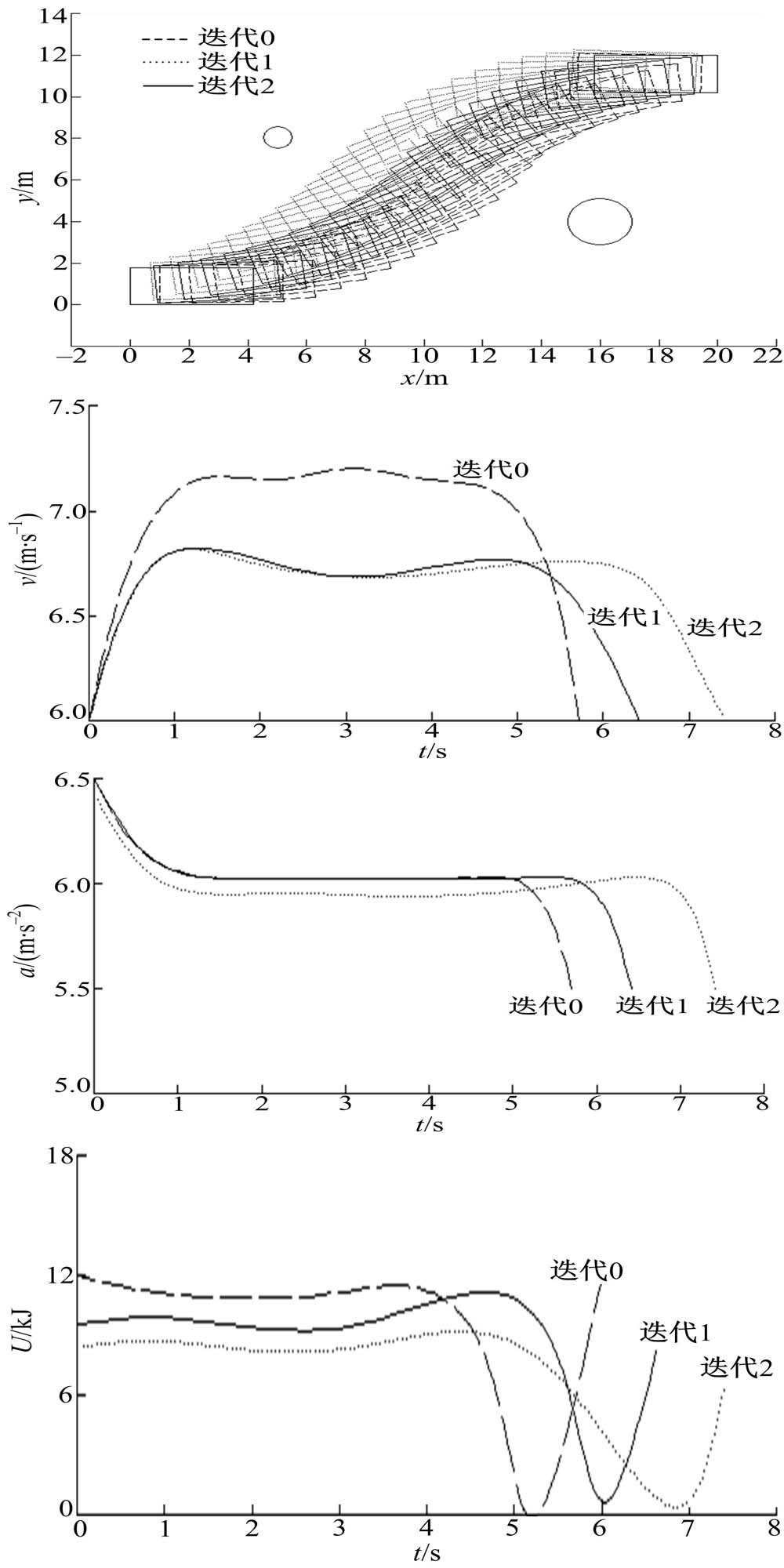
, LI Shun-ming, ZHAO Wan-zhongFig.6 Simulation results of different weights on driving trajectory,velocity,acceleration and energy