


{kind=link}
{kind=link}
{kind=link}
{kind=link}
城市道路人行横道处照明指标的确定
[程国柱1  , 李德欢
, 李德欢1 , 吴立新2 , 莫宣艳1, 3 , 徐慧智4 ]
, 李德欢, 莫宣艳|
|


作者简介:程国柱(1977-),男,副教授,博士.研究方向:道路交通安全.E-mail:guozhucheng@126.com
为了合理确定城市道路人行横道处的照明指标,保证驾驶人对过街行人的有效视认,进行了驾驶人夜间视认距离试验研究。分析了过街行人数量、状态(静止或运动)及衣服颜色对驾驶人夜间识别距离的影响,以及不同车速条件下驾驶人夜间视认距离随平均照度的变化规律,构建了驾驶人夜间视认距离-平均照度-车速关系模型。基于驾驶人夜间视认距离与反应制动距离间的安全行驶判别条件,提出了城市道路人行横道处平均照度的计算方法,并给出了实际案例。研究结果表明:当单个过街行人静止且衣服颜色较深时,驾驶人夜间对其进行视认最为困难;驾驶人夜间视认距离与平均照度呈正对数相关,与行驶速度呈负线性相关。
In order to determine reasonable lighting parameter of crosswalk of urban road and ensure driver's recognition of crossing pedestrian, experimental research on driver distance recognition at night was conducted. The impacts of the number, the state (static or moving) and the cloth color of crossing pedestrians on the driver recognizing distance were analyzed. The relationship between driver recognizing distance and average luminance at different driving speed was also studied. Then a model was established to relate the driver recognizing distance, the average luminance and the driving speed. A calculation method of the average luminance value of crosswalk of urban road at night was presented based on safe discriminating conditions between driver recognizing distance and response-braking distance. A case study using this method was carried out. Results show that it is more difficult for drivers to recognize crossing pedestrian at night when single pedestrian is static and the cloth color is dark. There exist a positive logarithm relation between driver recognizing distance and average luminance, and a negative linear relation between driver recognizing distance and driving speed.
提高路灯照度是避免夜间交通冲突发生的有效措施之一;但是,我国《城市道路照明设计标准》(CJJ 45-2006)中仅规定“平均水平照度不得低于人行横道所在道路的1.5倍”,缺少理论依据,事实上,对应不同的限速标准人行横道处的照明指标也应有所区别。可见,对城市道路人行横道处照明指标展开研究具有十分重要的现实意义。
国外的相关研究主要侧重于针对行人的驾驶人夜视系统测试及评价,以及夜间驾驶人视认特性等研究。Lim等[ 1]通过比较不同夜视系统下驾驶人对行人的感知特性,对两种夜视系统进行了对比测试。Fuchs等[ 2]研究了驾驶人与不同行人夜视系统的人机接口相互作用的评价方法。Brown[ 3]研究认为,夜视系统有助于驾驶人改善其视认距离,但与此同时也会增加驾驶人的工作负担,而自动报警装置会帮助驾驶人减轻负担,提高安全性。文献[4]构建了驾驶人在夜视系统帮助下检测行人的行为特性模型,应用该模型为远红外传感与近红外传感两种夜视系统制定了各自的眼部运动策略。Wood等[ 5]的研究结果表明,行人衣服颜色、灯光类型及眩光是影响驾驶人感知行人特性的显著因素;另外,驾驶人自身年龄对此也有一定的影响。文献[6]分别对青年、中年和老年驾驶人在夜间的视认能力进行了试验研究,结果表明,所有年龄组驾驶人的视认能力在夜间低照度条件下都会降低,老年驾驶人更为显著。
国内相关研究大多数集中于驾驶人夜间对障碍物、交通标志的视认规律。赵炜华等[ 7, 8]运用BP神经网络对驾驶人昼夜动态空间距离判识规律进行了研究,并探索了夜间驾驶人对红绿障碍物空间距离判识差异。潘晓东等[ 9]对夜间逆光条件下驾驶人对道路标志的视认特性进行了研究,发现顺光条件下视认性较好。姜军等[ 10]采用眼动仪和GPS等试验设备进行了驾驶人夜间标志视认实验,构建了指路标志位置计算模型。
综上所述,国外针对夜间行车安全问题已开发了针对行人的夜视系统,并对其有效性从试验与理论角度予以评价,但是由于成本较高在我国开展该项研究显然并不合适。国内在夜间驾驶人视认特性方面也开展了相应研究,包括对障碍物及交通标志的空间辨识能力等,但是针对行人的驾驶人夜间视认特性研究则未见报道,而对于城市道路人行横道处照明指标研究更缺少系统的理论研究。因此,本文从分析夜间驾驶人对过街行人的视认规律入手,构建夜间视认距离-平均照度-车速关系模型,再根据夜间安全行车判别条件确定不同车速条件下的城市道路人行横道处路灯平均照度建议值。
1.1.1 试验时间与路段
试验时间选在20∶00~24∶00,试验路段包括哈尔滨市江北区的世茂大道、天翔路、江湾路、世纪大道和天元路,试验道路总长度约6 km,道路照明设施齐全,夜间车流量较小,有路段过街人行横道多处且光照条件各异,能够满足试验的要求。
1.1.2试验人员与设备
选择8名驾驶人进行测试,驾驶人特征如下:男、女驾驶人各占50%;青年驾驶人(18~40岁)、中年驾驶人(40~60岁)各占50%。由于老年驾驶人比例较小,故未考虑;此外,8名被测试驾驶人均为非职业驾驶人,文化程度高中以上,体现了测试样本的无偏性。试验前,驾驶人具有充足的睡眠,不能饮酒,从而保证试验数据的准确性。本次试验需记录员2名,分别负责测定时间和填写记录表。在试验过程中,记录员应尽量保持安静,避免对驾驶人造成不必要的干扰。
试验车辆为哈飞面包车,在试验开始前,检测车辆运转正常,行驶性能良好,油料充足,能保障试验顺利进行。采用TES-1330A照度计测量人行横道处的路灯照度值。
1.1.3试验步骤
(1)在人行横道处布置过街行人。每轮测试的位置可随机变换,避免驾驶人形成记忆,在还未看到过街行人时就猜测判断,对试验结果产生干扰。
(2)驾驶人启动汽车,按照预定的行驶路线和速度 v匀速行驶。在此过程中驾驶人应该集中注意力,切忌与记录员随意交谈,分散注意力。
(3)在行驶过程中,当驾驶人发现并辨别出人行横道处过街行人时立即报告,然后继续保持速度 v匀速行驶;记录员在听到报告的同时立即按下秒表开始计时(该时刻点记为 t1)。
(4)当车辆匀速行驶到人行横道处时,记录员立即按下秒表暂停计时(该时刻点记为 t2),计算驾驶人视认距离为 S=v×( t2 -t1)。
(5)起始车速为20 km/h,之后以10 km/h为步长递增速度,重复步骤(3)(4)(5),最高测试速度为80 km/h。
考虑夜间过街行人数量、状态(运动或静止)、衣服颜色对驾驶人视认距离的影响,针对1处人行横道,分别开展3组驾驶人夜间视认距离对比试验:过街行人3名和1名、过街行人以1.5 m/s速度过街和静止、过街行人着深色衣服与浅色衣服。对驾驶人视认距离进行测试后,对3组试验数据进行整理,有效样本数据总量为448个,经计算得到3组试验中驾驶人视认距离的平均值,见图1。
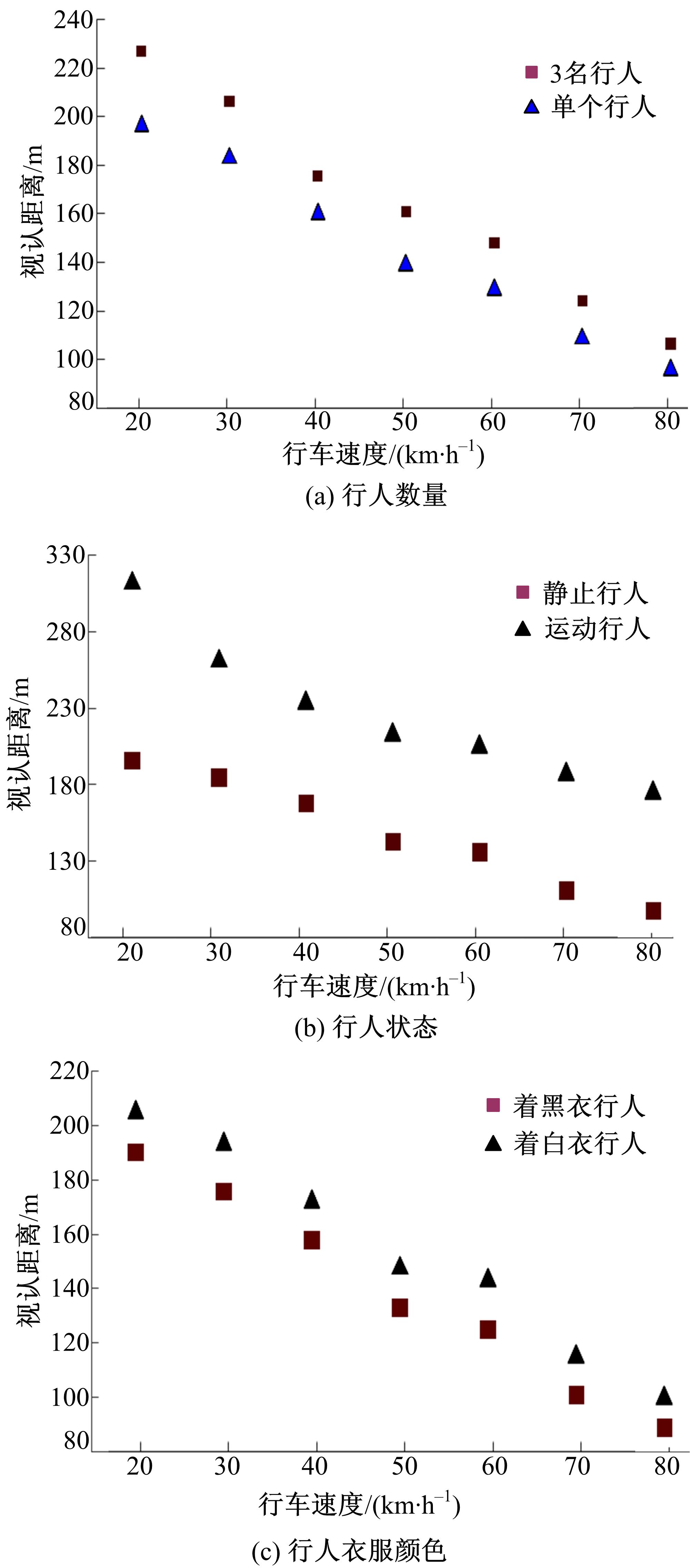 | 图1 驾驶人夜间视认距离与过街行人数量、状态、衣服颜色的关系Fig.1 Driver recognition distance vs.crossing pedestrian’s amount,state and clothes color at night |
从图中可以看出:过街行人数量较多时驾驶人能够较早发现,有助于过街行人的安全。过街行人运动时,驾驶人对过街行人的视认距离比行人静止时有较大幅度的提高。夜间过街行人衣服颜色对驾驶人视认有一定的影响,与深颜色相比,浅颜色更易被驾驶人视认。此外,行驶速度越高,驾驶人对行人的视认性越差。
采用照度计对试验路段的人行横道处进行路灯照度测量,见表1。在车辆行进一侧的人行横道上选择5个均匀分布于路缘线与路中线之间的特征点,对各点处的照度进行观测,并计算行人过
| 表1 试验路段人行横道照度测定值 Table 1 Observed luminance at crosswalks of experimental sections lx |
街处的平均照度 E。将采集到的6个路段人行横道照度进行统计分析并按照平均照度由大到小的顺序排列。
《城市道路工程设计规范》(CJJ37-2012)对不同等级道路设计速度进行了规定,间接对道路行车速度进行了等级划分:低速保持在40 km/h以内,中速分布在40~60 km/h,高速分布在60 km/h以上,据此确定本文的车速等级。
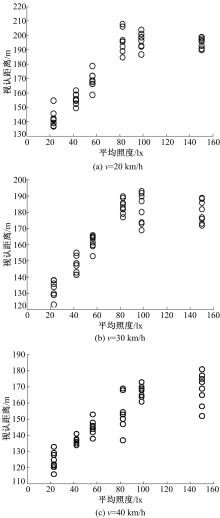
分别将各低速条件下的驾驶人视认距离随平均照度的变化绘制成散点图,如图2所示。
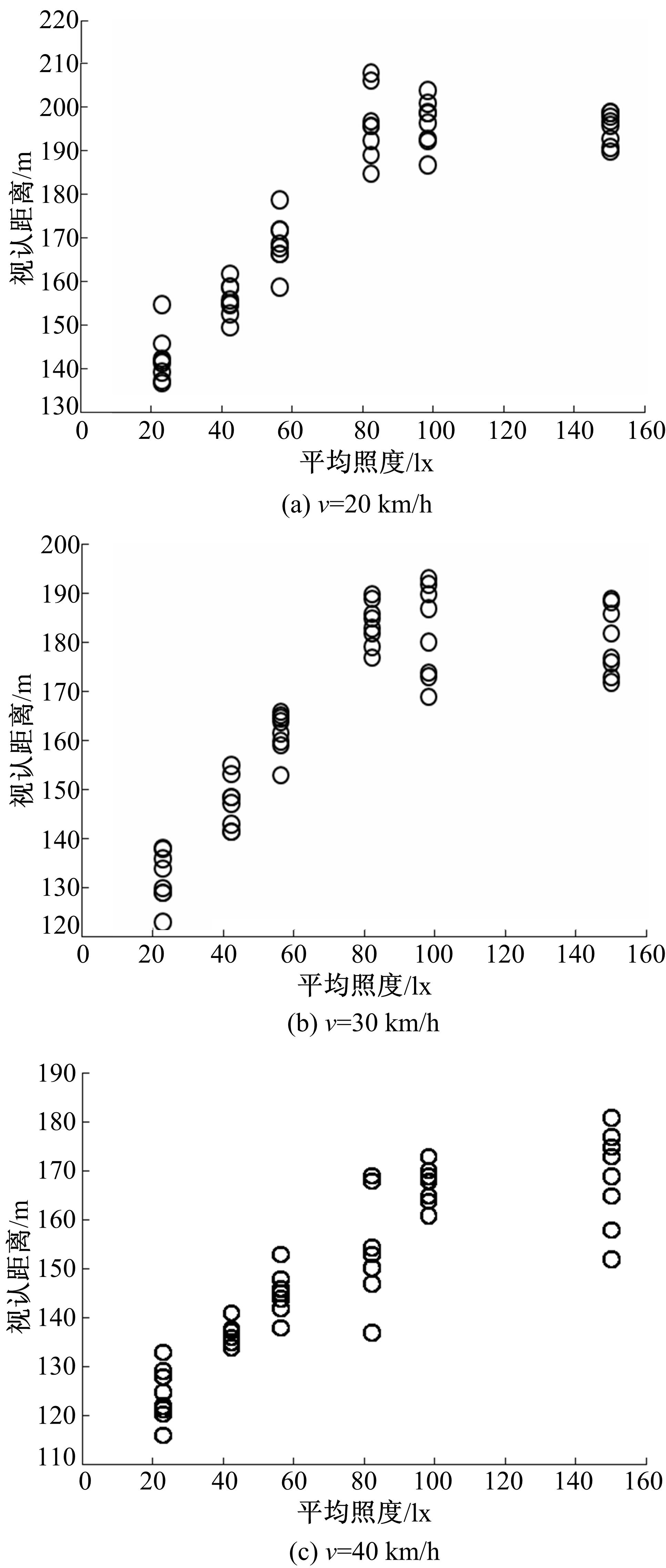 | 图2 低速条件下驾驶人视认距离与平均照度的关系Fig.2 Driver recognition distance at night vs. average luminance at low speed |
从图2可以看出:随着平均照度的逐步增大,视认距离也逐渐增大。在低速状态下,平均照度在约20至80 lx的范围内时,驾驶人视认距离随平均照度的增长速率较快。在此之后随着平均照度的增大,视认距离增长速率逐渐放缓。甚至在速度为120 km/h时,照度增大到一定后,视认距离出现了降低的趋势。这说明夜间光照对视认距离的影响增长到一定程度后,其作用就趋于稳定,此时即使再提高照度,对驾驶人视认距离的增长也将十分有限。
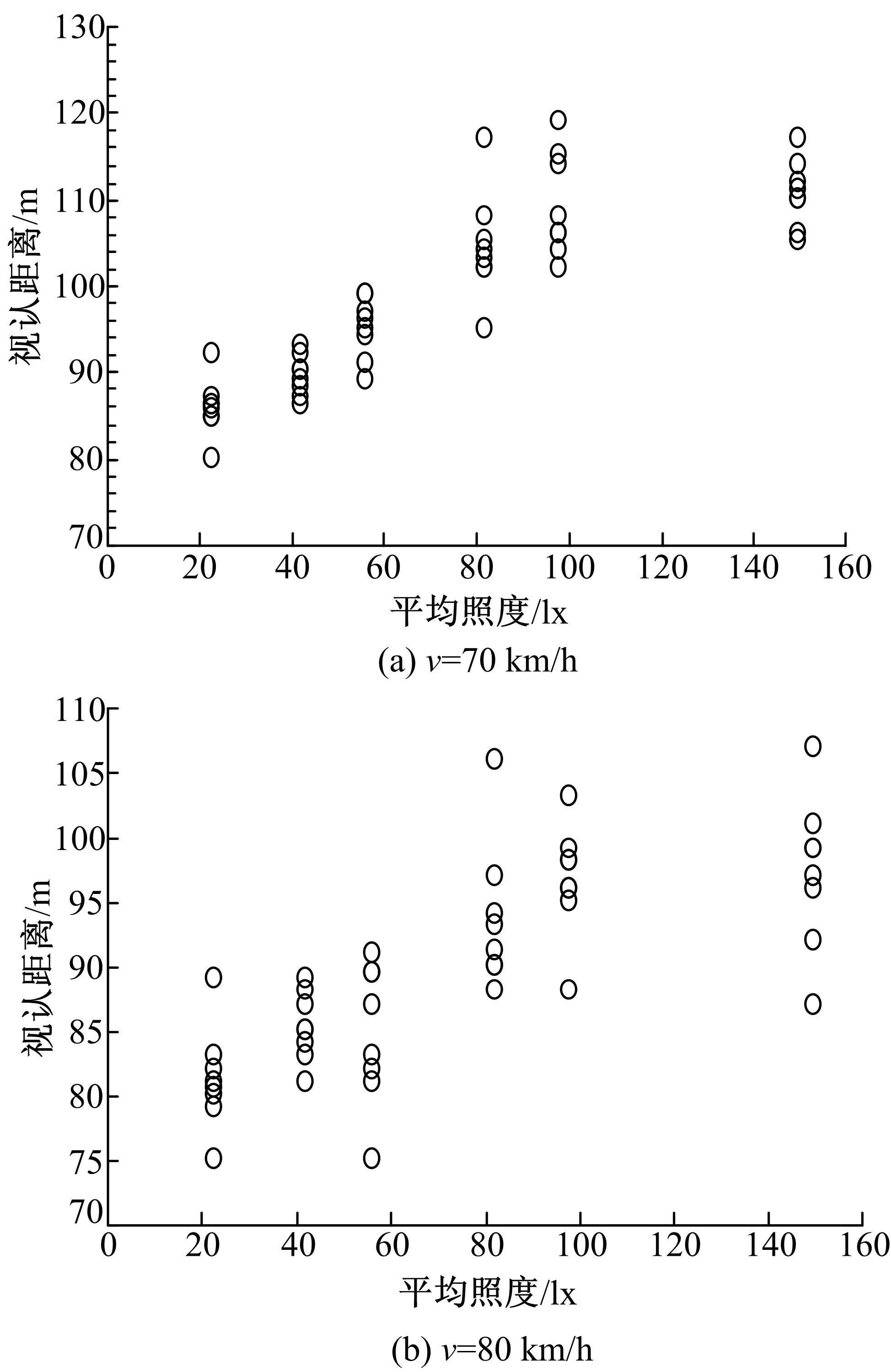
试验车速满足中速等级50和60 km/h,将各车速下的样本数据绘制成散点图,如图3所示。
从图3可以看出:两种行车速度下的驾驶人视认距离都随着平均照度的增大而增大。与低速行车条件下的规律相类似,在较低照度下,视认距离随平均照度增长较快,但是其范围有所缩小,如在车速为50 km/h时,该范围大致为20~60 lx;随着平均照度越来越大,驾驶人视认距离逐步趋于稳定,增长较慢。
 | 图3 中速条件下驾驶人视认距离与平均照度的关系Fig.3 Driver recognition distance at night vs.average luminance at medium speed |
为尽量确保夜间人行横道处过街行人安全,驾驶人对过街行人的夜间视认距离与汽车安全停车距离必须满足关系式(1):
式中: SV为驾驶人夜间视认距离; ST为安全停车距离; SR为驾驶人制动反应时间内行驶距离; SB为制动距离; S0为安全距离。
3.1.1 制动反应距离 SR
汽车在驾驶人制动反应时间内以制动初速度行驶的距离可用制动反应时间与制动前的初速度相乘得到。当车辆制动前的行驶速度已知时,通过测得夜间驾驶人制动反应时间就能够计算得到制动反应距离。在本文中驾驶人制动反应时间 T0可细分为4个组成部分,分别为驾驶人视认出前方过街行人的时间 T1、分析信息至决定采取制动措施的时间 T2、把脚从油门踏板移动至刹车板的时间 T3和使刹车板与制动器完全接触并开始产生制动力的时间 T4,即:
相关研究给出了正常天气条件下的制动反应时间,前提条件是驾驶人不知道前方障碍物的情况。研究表明[ 11],驾驶人制动反应时间呈对数正态分布,本文驾驶人制动反应时间取其95%位数值,即 T0=2.45 s。故夜间驾驶人制动反应距离为:
3.1.2 制动距离 SB
制动距离指驾驶人踩下刹车板之后,汽车从开始减速至其完全静止的过程所驶过的距离。汽车制动过程可以划分为两个阶段。第一个阶段为制动器刚开始产生作用,制动力从零逐步增大至最大制动力;第二阶段为当制动力达到最大值并持续制动至汽车停止。制动距离 SB为[ 12]:
式中: v0为汽车制动时行驶初速度。
3.1.3 安全距离 S0
安全距离是指当汽车制动至完全静止时车辆前端距过街行人或障碍物的距离,取值范围为5~10 m,本文取中间值8 m。
综上可得夜间汽车安全停车距离为:
对驾驶人夜间视认距离与行车速度、平均照度的可能关系模型进行假设,给出8种可能的模型形式。运用数理统计分析软件SPSS,对试验采集到的336个数据进行分析,得到可能关系模型中的参数及相关系数,见表2。
| 表2 驾驶人夜间视认距离-车速-平均照度模型 Table 2 Relationship models between driver recognition distance and driving speed, average luminance at night |
对表2中各模型形式进行对比,模型5、模型6和模型7的参数 a均为零,即视认距离与车速的二项式关系假设失败。
对其余的关系模型进行优选,可能的关系包括线性关系、对数关系和幂函数关系。相关系数最高的模型3与行驶速度呈线性关系,与平均照度呈对数关系,这与上述的定性分析结果相一致。因此,本文采用模型3作为驾驶人视认距离-车速-平均照度关系模型,具体形式如下:
式中: E为人行横道处的平均照度。
从模型形式来看,夜间驾驶人对过街行人的视认距离与车速基本呈负线性关系,与人行横道处平均照度呈正自然对数关系。
由以上分析可知,在车速一定的情况下,人行横道处的平均照度越低,驾驶人视认距离越小;而当其小于汽车安全停车距离时,则不满足安全行车条件。由此可知,存在这样一个临界状态,即当平均照度降低到到一定值时,驾驶人视认距离恰好等于汽车安全停车距离。结合式(6)(7)可计算得出满足安全行车临界条件的平均照度值 E:
根据式(8),可计算得出不同设计速度下满足驾驶人视认安全性的人行横道处的照度值,如表3所示。
| 表3 不同行车速度条件下人行横道处平均照度计算值 Table 3 Calculation results of average luminance on crossing walk at different speed |
从表3可以看出:当车辆行车速度达到70 km/h及以上时,人行横道处平均照度要高于9797 lx,该照度值已趋近于昼间照度,但夜间很难也没有必要达到如此之高的照度。同时也表明当速度达到一定值后,提高人行横道处照度从而确保过街行人安全的效果也变得十分有限。因此,在夜间采取相应的限速措施也是十分必要的。
(1)驾驶人对过街行人的识别距离受行人数量、过街速度及衣服颜色的影响显著。行人数量较少、静止、着深色衣服时,驾驶人对其的视认性最差,该规律在不同速度条件下均成立。
(2)在一定的车速条件下,驾驶人夜间对过街行人的识别距离随平均照度的增大而增大,构建的驾驶人夜间识别距离与平均照度、行驶速度关系模型表明,驾驶人夜间视认距离与平均照度、行驶速度分别呈正对数和负线性相关。
(3)基于驾驶人夜间识别距离与停车距离的安全判别条件计算给出的夜间平均照度值可以确保驾驶人在夜间发现过街行人后采取紧急制动措施的有效性,保证过街行人安全。但是,当速度高于70 km/h时,其效果变得有限,此时可通过限速措施保证行车安全。
值得指出的是,本文只是初步探索,所以只选择了8名驾驶人进行试验,在后续项目研究过程中有待于进一步增大样本量和试验车型,完善数据分析与模拟构建,并进行雨、雾、雪等不良气象条件下的影响分析。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|