动态约束下可重构模块机器人分散强化学习最优控制
 , 刘克平
, 刘克平 Decentralized reinforcement learning optimal control for time varying constrained reconfigurable modular robot
DONG Bo1 , LIU Ke-ping2 , LI Yuan-chun2
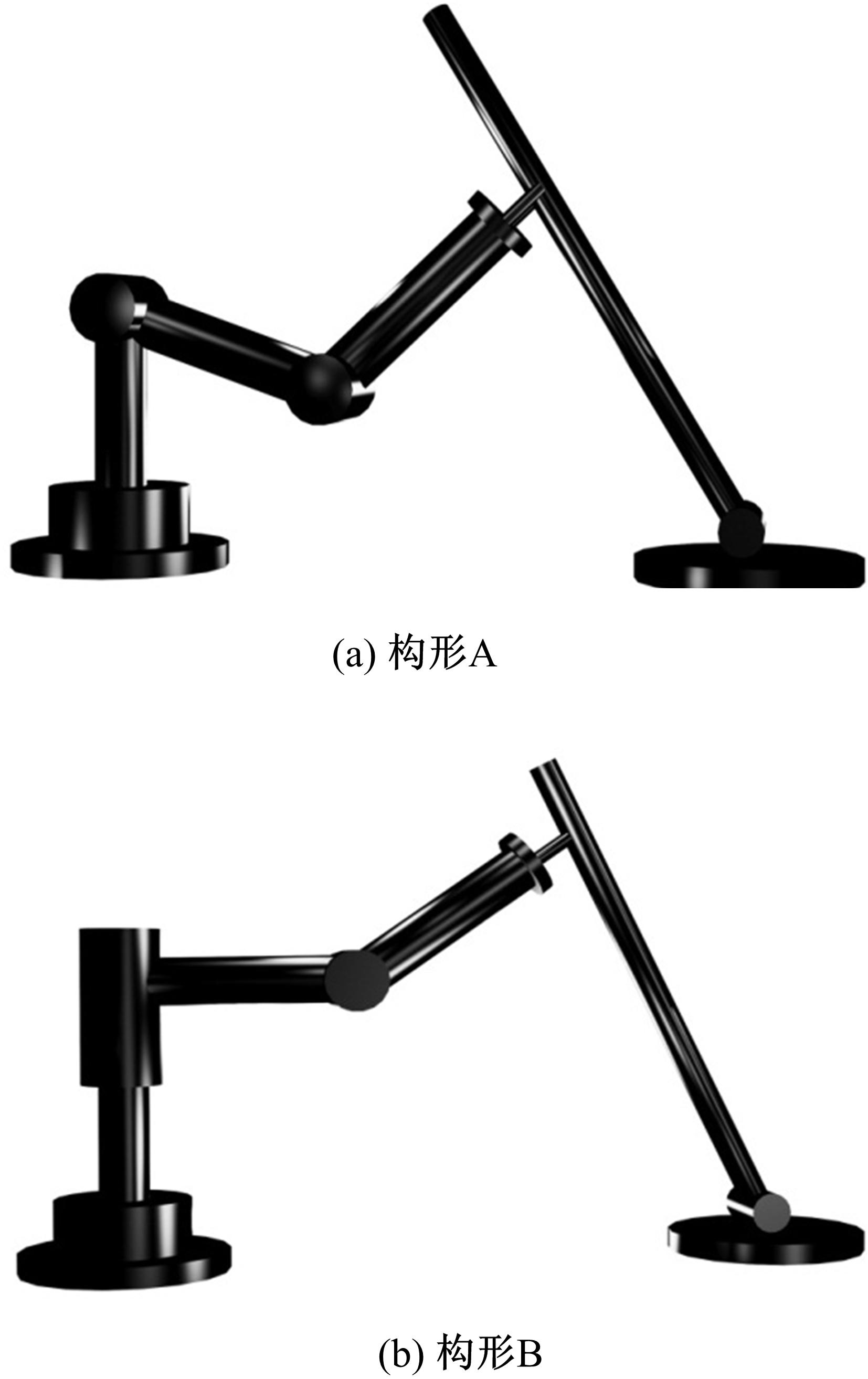
, LIU Ke-ping Fig.2 Configuration A and B for varying constrained robot