



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
现代互谱估计方法及仿真分析
[董浩 , 迟学芬, 曲良东, 石要武, 赵晓晖, 董超]
, 迟学芬, 曲良东, 石要武, 赵晓晖, 董超]
, 迟学芬, 曲良东, 石要武, 赵晓晖, 董超]
|
|


作者简介:董浩(1981-),男,讲师,博士.研究方向:通信系统,信号处理,车联网.E-mail:donghao004@163.com
提出了一种现代互谱估计方法——基于互谱自回归(AR)模型参数估计的SVD算法,相比作者之前提出的基于互谱AR模型参数估计的Levinson算法,本文提出的方法有效地克服了互相关函数
A modern cross spectrum estimation method is proposed, which is the SVD algorithm based on cross-spectrum of the Auto-Regressive (AR) model for parameter estimation. Compared to previously proposed Levinson algorithm based on cross-spectrum of the AR model, the new method of this study can effectively overcome the influence of the estimation error of the cross correlation function
变换域通信系统(TDCS)由于可以有效抑制通信传输中的干扰问题,近年来针对其抗干扰性能的研究已成为国内外通信系统领域的研究热点[ 1, 2]。信道估计是TDCS的最关键环节,而谱估计法是信道估计的核心方法,谱估计法分为自谱估计法和互谱估计法。自谱估计法分为两种:传统自谱估计法和现代自谱估计法,后者相比前者,大大提高了谱的分辨率,且不受限于数据长度,然而对测量噪声抑制效果很差。在这种背景下,互谱估计法被提出,互谱估计法分为传统互谱估计法和现代互谱估计法,前者虽然能抑制测量噪声,但缺点是谱估计方差较大,谱的分辨率较低。本文对互谱估计理论及方法进行了深入研究,提出一种基于互谱自回归模型的SVD算法的现代互谱估计方法,并对TDCS如何有效抑制测量噪声、降低误码率、提高频谱资源的利用率和通信质量进行了仿真验证。
文献[3]指出,通常为了对信号进行互谱估计运算,首先要将其转化为互谱估计问题,可以通过独立双通道放大器测量方法解决。
图1中,放大器A和B各采用两个相互独立电源 ECC1和 ECC2供电,从而所产生的噪声也相互独立。设A和B的放大倍数分别为
式中:
根据式(1)(2)能求出
显然,这种方法可以抑制噪声,实现对信号的互谱估计。
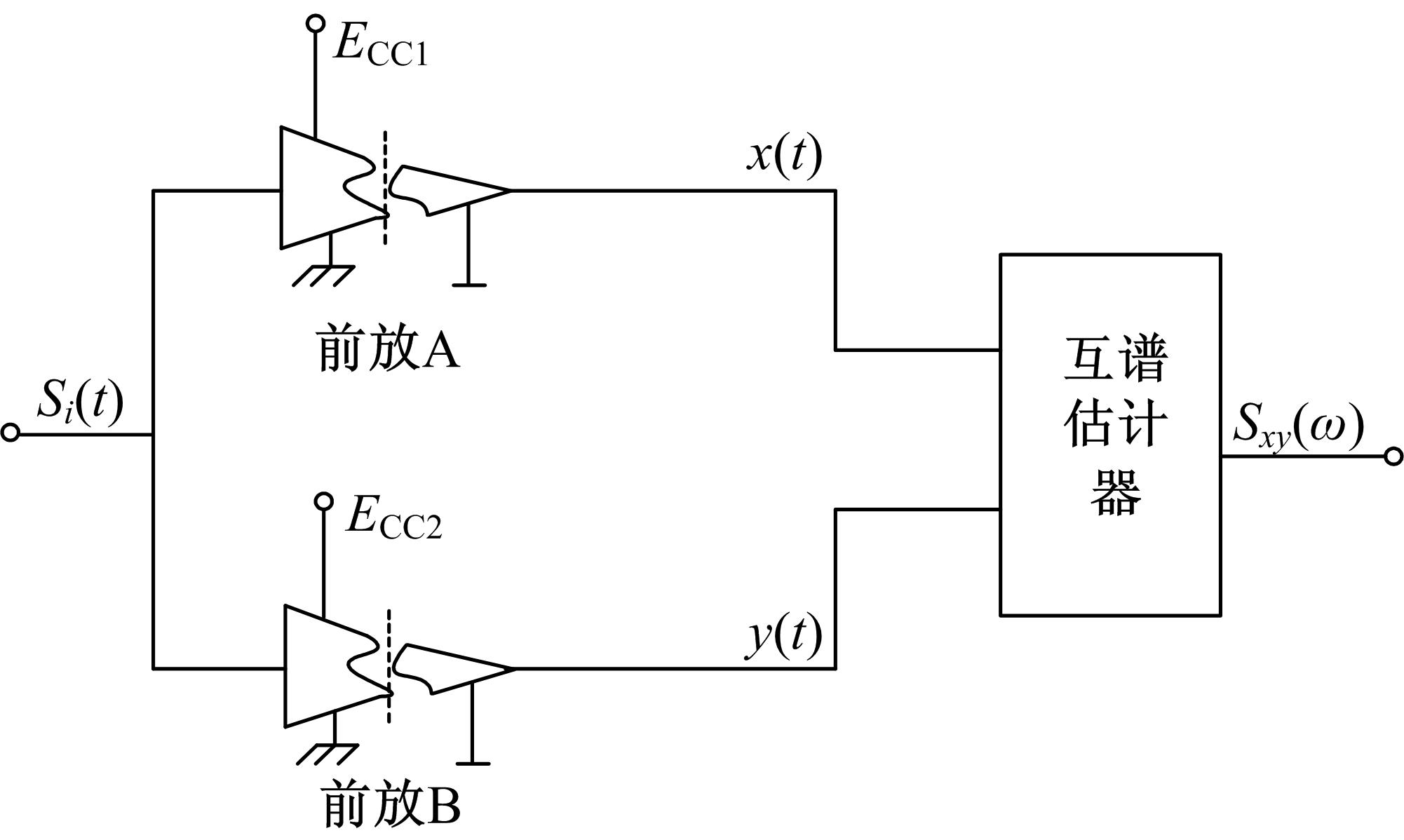 | 图1 相互独立的双通道互谱估计器原理图Fig.1 Independent cross spectral estimator diagram |
针对互相关函数和互功率谱的定义方式有许多,本文选用最常用的一种定义。
设时间序列
式中:*表示取其共轭[ 4]。
根据维纳-辛钦定理,可直接得到
现代互谱估计方法成立首先需要满足两个条件,即“互谱计算问题”和“互谱分解问题”。前者是指互功率谱可通过两个“联合平稳”随机序列的线性模型直接求得;后者是指通过互功率谱的分解可求得这两个线性模型。
定理1 设时间序列
可得
如果式(9)采用Z变换形式表示,那么可得:
定义1 若互功率谱
定理2(互功率谱分解定理) 若联合平稳的两个随机过程的互功率谱
式中:
目前很多“现代”自谱估计法都是在自相关函数的Yule-Walker方程基础上提出的,要构造“现代”互谱估计法,需先创立互相关函数的Yule-Walker方程,具体有下面相关定理。
定理3(互相关函数的Yule-Walker方程) 设时间序列
设
式中:
式(20)(21)可分别简写为:
根据矩阵的奇异值分解定理,有:
将
将
由式(28)(30)(33),可得:
根据矩阵理论,用这种方法求得的
若
用相同的方法可求得:
实际应用中,通常可取
因此,只需作一次SVD分解即可,从而大大减少了奇异值分解的计算量。
在之前的研究中[ 5],作者提出的基于互谱AR模型参数估计的Levinson算法忽略了互相关函数
为了验证这一结论,应用和验证Levinson算法谱估计性能采用的相同两个数字仿真模型为:
其中,时间序列
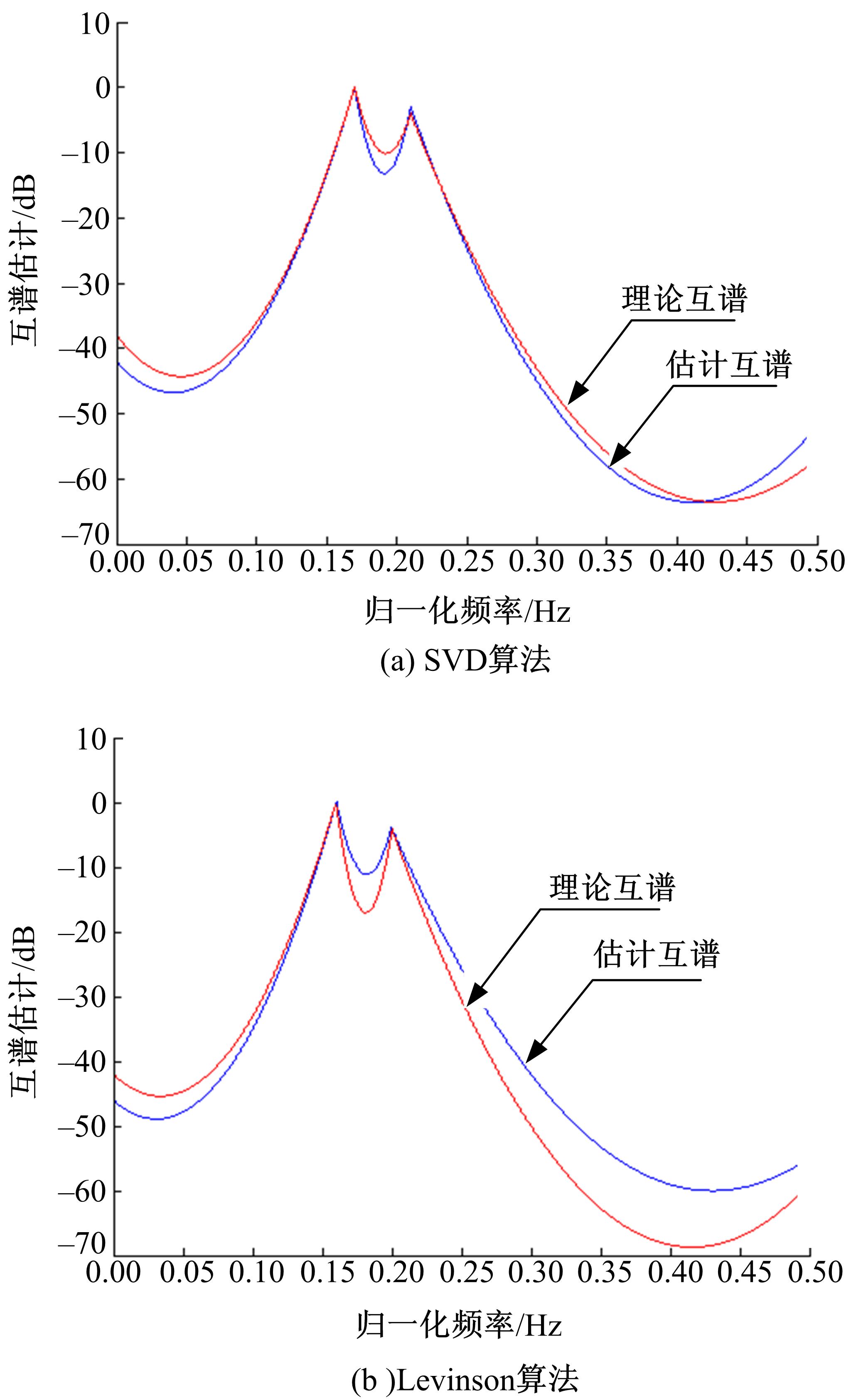 | 图2 互谱估计Fig.2 Cross spectral estimation |
由图可见,即使在测量噪声和信噪比为0 dB的情况下,本文提出的方法也具有良好的谱估计性能,能有效抑制测量噪声,由于克服了估计误差的影响,其谱估计性能强于互谱Levinson算法。
在有测量噪声的背景下,采用数据流仿真和MATLAB软件搭建仿真平台,研究TDCS在不同干扰下的抗干扰能力。
(1)数据源采用随机二进制数。
(2)测量噪声
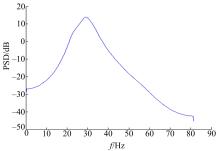
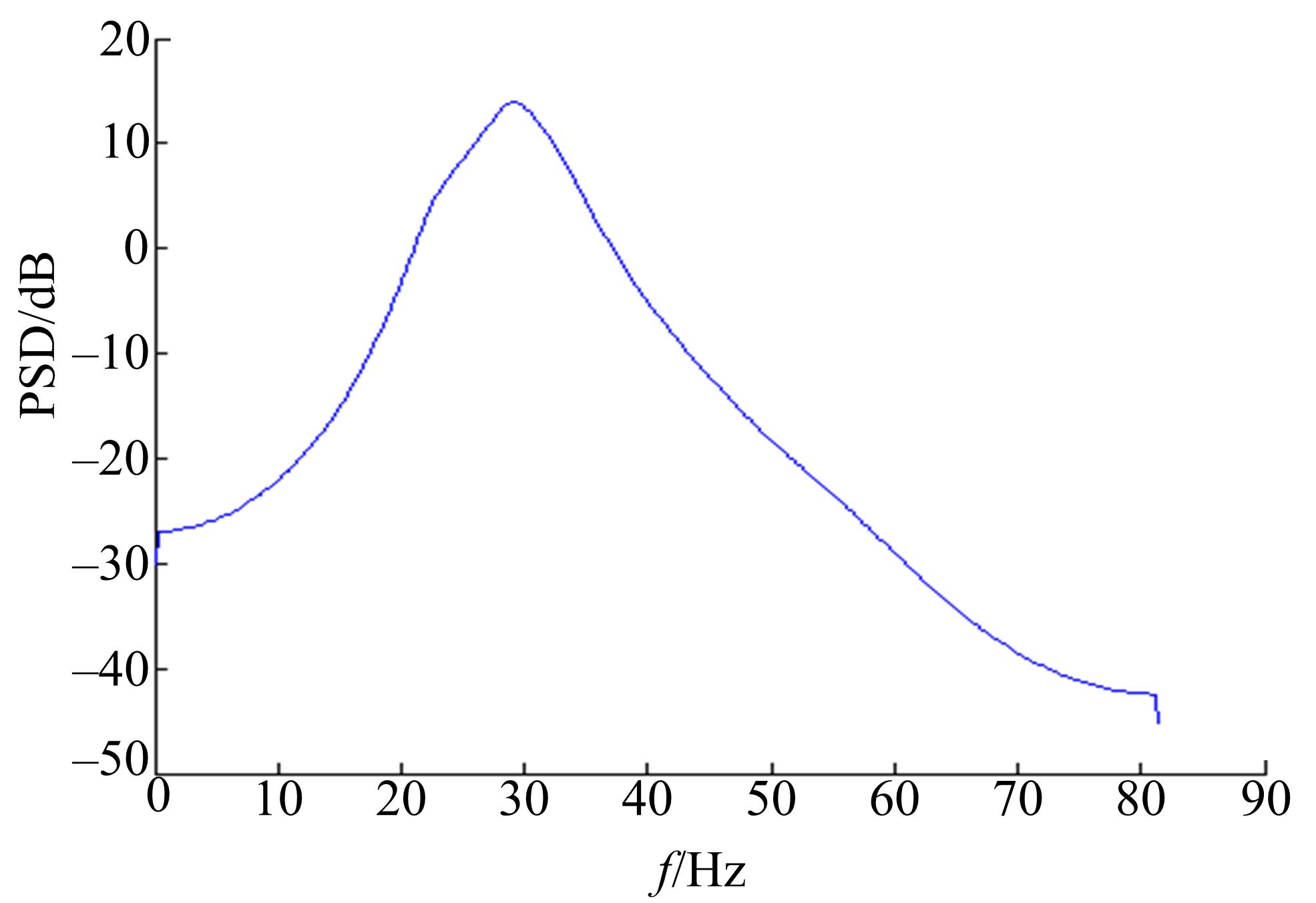 | 图3 测量噪声的功率谱Fig.3 Power spectrum of the measurement noise |
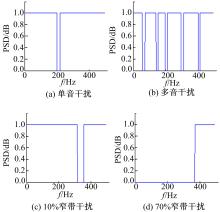
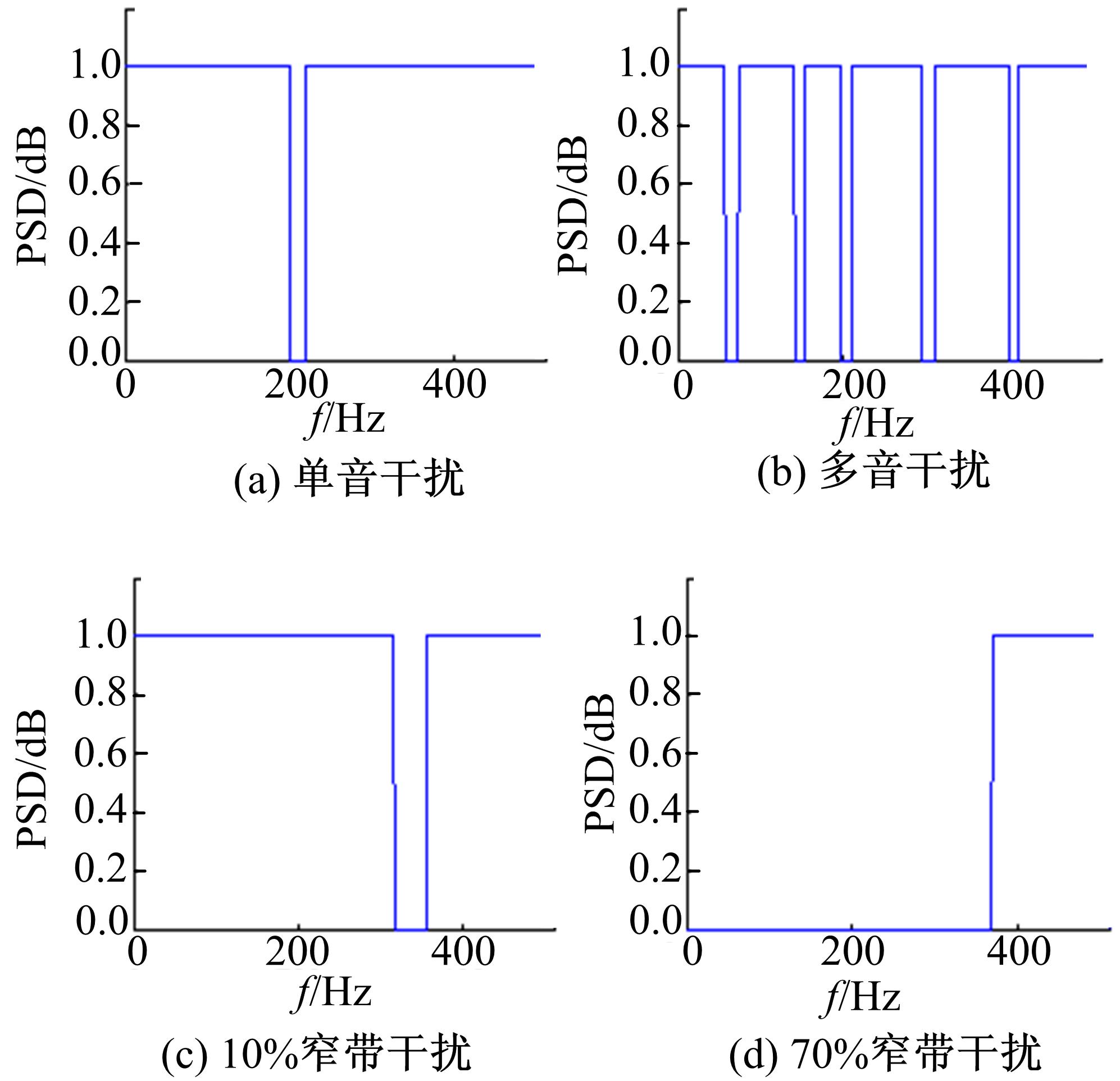
(3)干扰分别选用单音干扰、多音干扰、10%窄带干扰和70%窄带干扰。
(4)信噪比 Eb/ N0=4 dB,干信比
(5)随机相位的范围是:
(6)选用直接序列扩频的抗干扰性能为比较对象。
(1)应用本文提出的方法作为信道谱估计法。
(2)随机序列为9阶的
(3)分别选用双极性调制、二元循环移位键控(BSCK)调制和二元循环翻转移位键控(BCASK)调制方法。
由图4可知,在测量噪声背景下,应用本文提出的方法进行谱估计,可以有效抑制测量噪声,谱分辨率较高。由图5可知,针对信道单音干扰、多音干扰、10%窄带干扰和70%窄带干扰,应用幅度谱成型法可以有效抑制这些干扰。
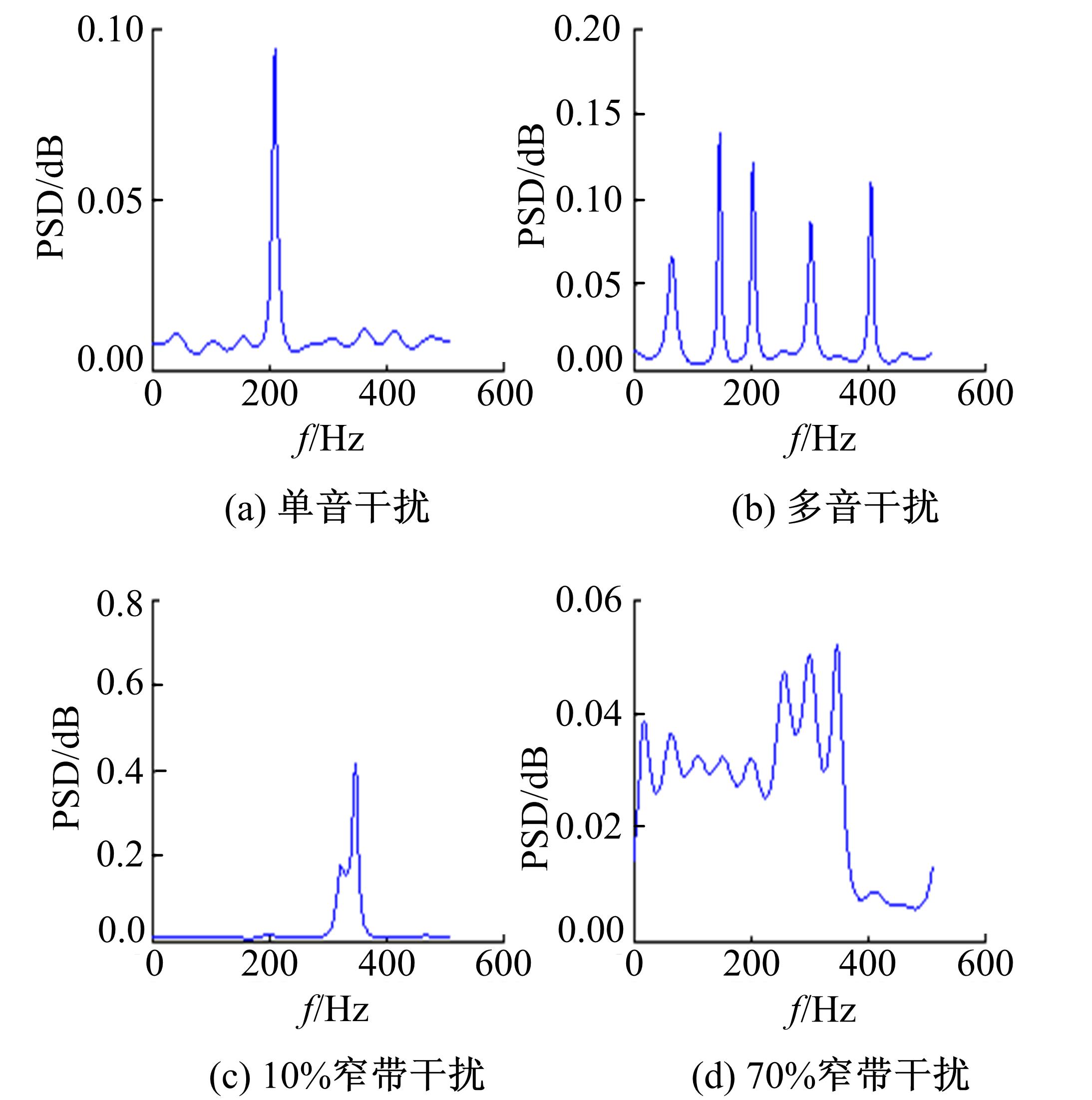 | 图4 在不同干扰下信道的功率谱Fig.4 Channel power spectrum under different interference |
 | 图5 幅度谱图Fig.5 Amplitude spectrum |
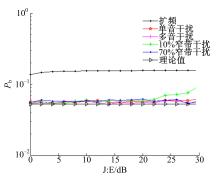
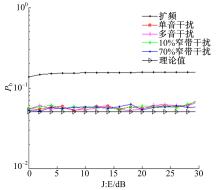
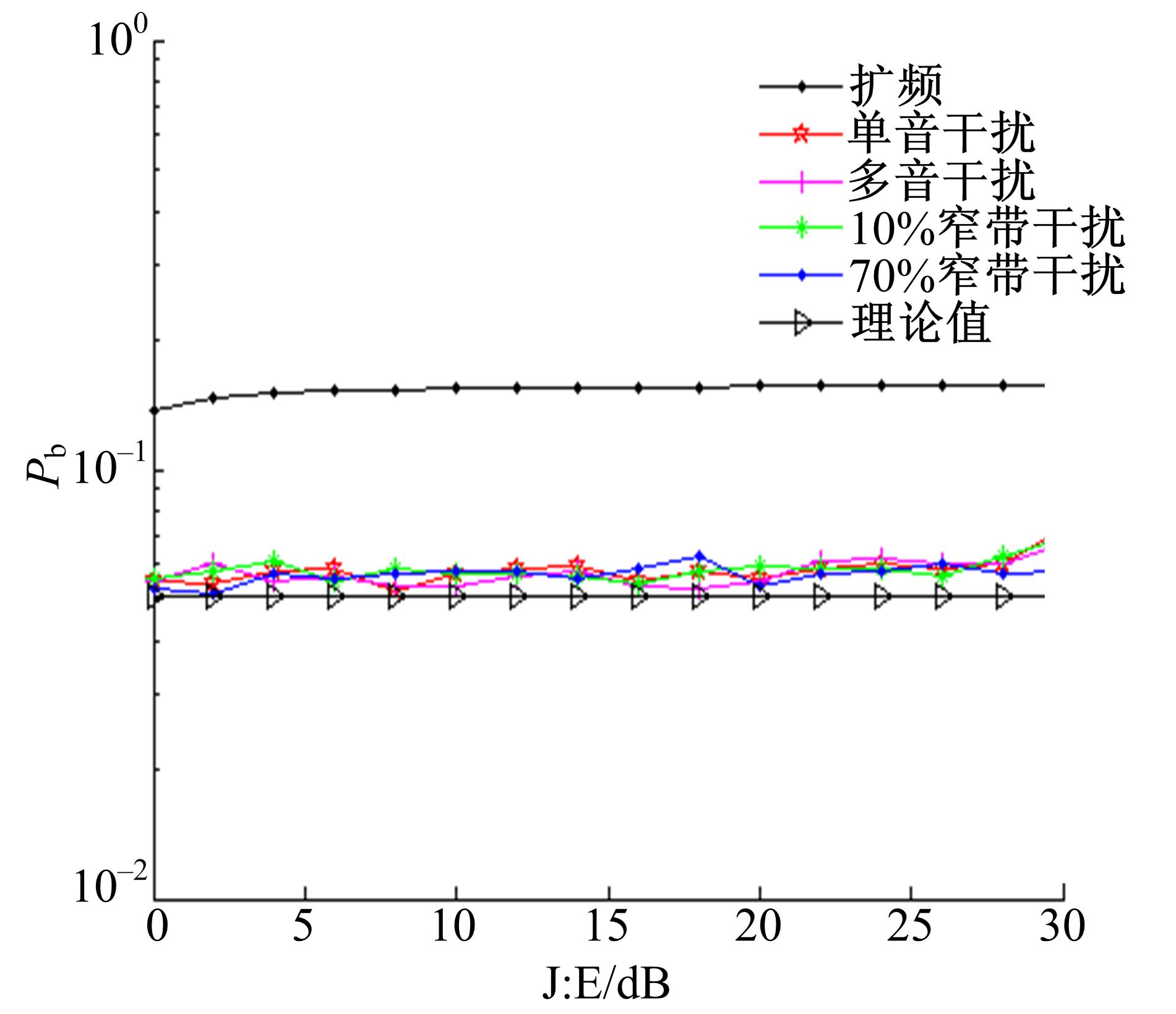
由图6可知,采用双极性调制,TDCS针对多音干扰的抑制效果最好。由图7可知,采用BCSK调制,TDCS针对单音干扰、多音干扰和70%窄带干扰的抑制效果较好,而对10%窄带干扰的抑制效果较差。
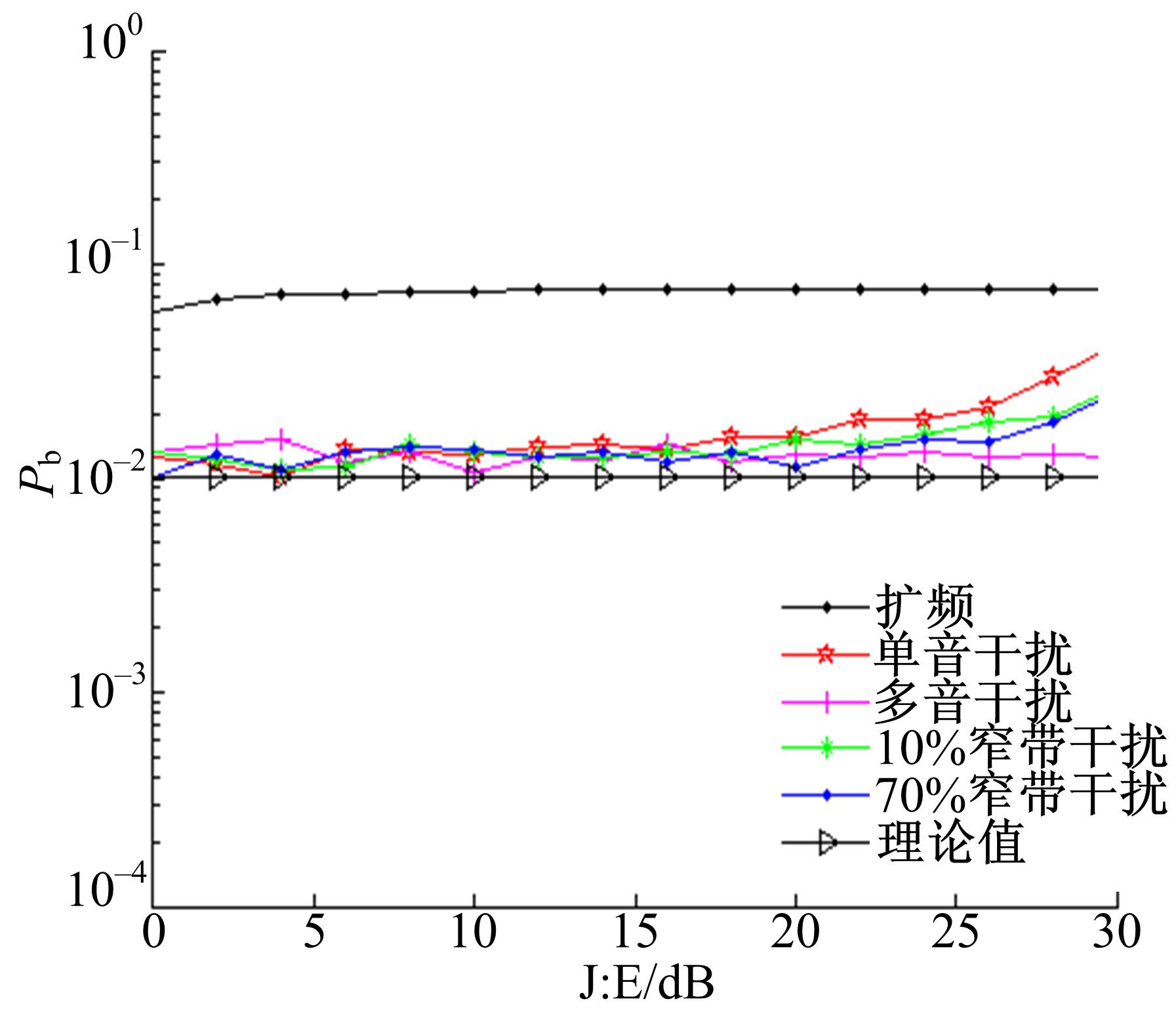 | 图6 基于双极性调制的误码率Fig.6 Error rate based on bipolar modulation |
 | 图7 基于BCSK调制的误码率Fig.7 Error rate based on BCSK modulation |
由图8可知,采用BCASK调制,针对不同的干扰,TDCS的误码率都远远低于直接序列扩频通信系统的理论最小误码率。
 | 图8 基于BCASK调制的误码率Fig.8 Error rate based on BCASK modulation |
对互谱估计理论及方法进行了研究,提出一种现代互谱估计方法。该方法有效克服了互相关函数
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|