车载毫米波雷达对前方目标的运动状态估计
 , 王竣, 李红建
, 王竣, 李红建Target motion state estimation for vehicle-borne millimeter-wave radar
GAO Zhen-hai1 , WANG Jun1 , TONG Jing1 , LI Hong-jian2 , GUO Zhang-yong1 , LOU Fang-ming1
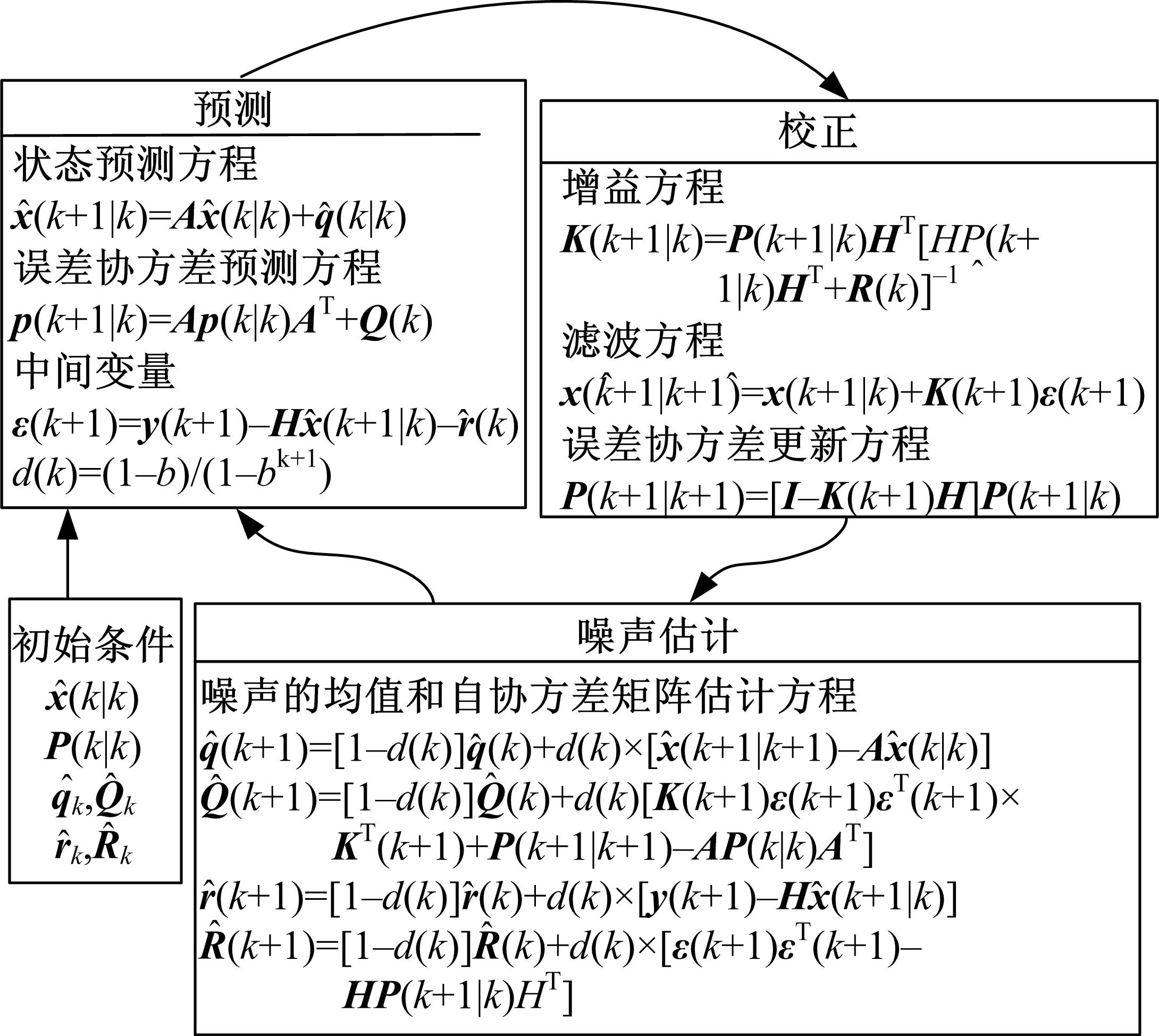
, WANG Jun, LI Hong-jianFig.2 Adaptive Kalman filter algorithm and key equations