基于双向控制的线控转向系统路感设计
 , 宗长富, 陈国迎
, 宗长富, 陈国迎Road feel design for vehicle steer-by-wire system based on bilateral control
ZHENG Hong-yu1 , ZONG Chang-fu1 , HE Lei1 , CHEN Guo-ying1 , LIU Ming-hui1, 2
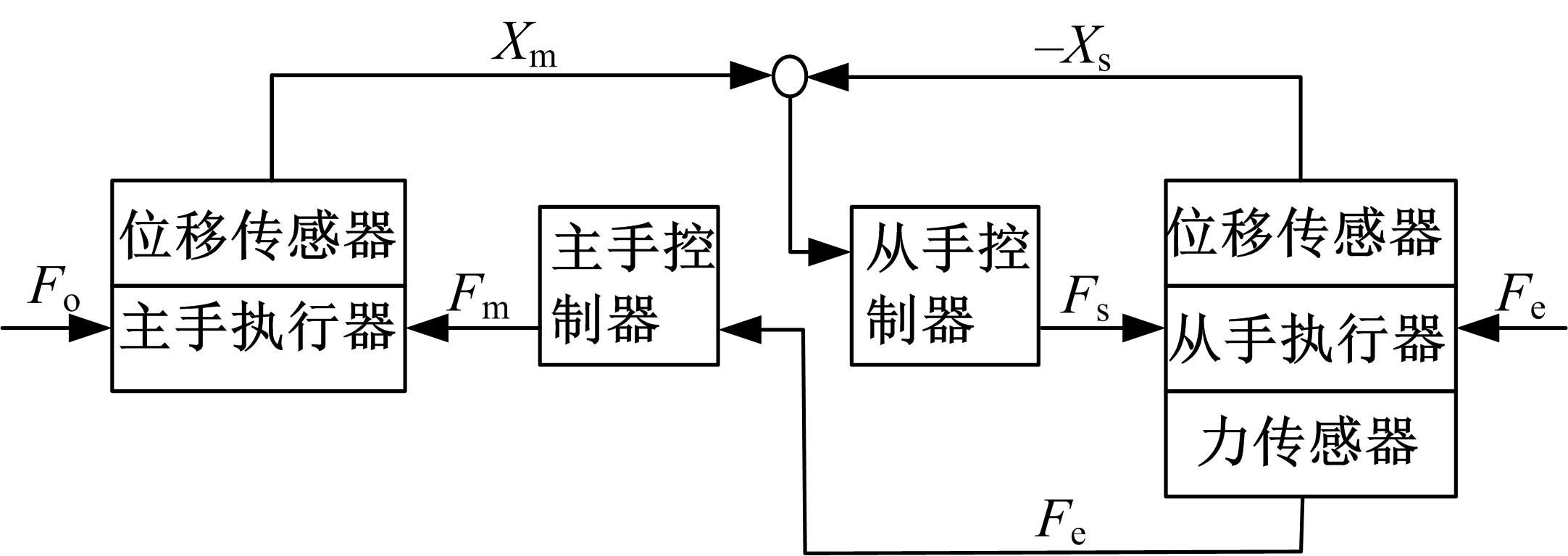
, ZONG Chang-fu, CHEN Guo-yingFig.2 Force feedback and position deviation control strategy