
{kind=link}
{kind=link}
{kind=link}
{kind=link}
随机交通网络环境下自适应最可靠路径问题
[潘义勇1, 2  , 孙璐
, 孙璐2, 3 ]
, 孙璐]
|
|


作者简介:潘义勇(1980-),男,博士研究生.研究方向:交通网络最优路径.E-mail:uoupanyg@gmail.com
为了研究交通网络耗时最优路径选择问题,建立了随机网络环境下自适应最可靠路径问题的数学模型。首先,建立随机网络模型反映交通网络的耗时随机特性;其次,在该网络环境下定义最可靠路径策略和最可靠状态链,并且证明最可靠状态链满足动态规划的 Bellman's准则;第三,构造基于动态规划的逐次逼近算法求解该问题,并且证明提出的逐次逼近算法是多项式时间算法;最后,编写基于MATLAB计算机语言的算法程序,并针对实际交通网络Sioux Falls (SF) network展开数值试验,计算结果验证了该算法的正确性和可行性。
In order to analyze the problem of selecting optimal path in traffic network, adaptive reliable shortest path problem is addressed in stochastic network. First, the mathematical model of stochastic traffic network is established to reflect the stochastic characteristic of traffic time in traffic network. Second, the optimal-reliable routing policy and optimal-reliable state chain based on reliability theory are uniformly defined in stochastic network; and the optimal-reliable state chain satisfies Bellman's principle that is the core of dynamic programming. Third, a successive approximation algorithm based on the dynamic programming is developed to solve the adaptive reliable shortest path problem in stochastic network, whose complexity is polynomial time. Finally, a computer program using Matlab language is developed to compute on the Sioux-Falls (SF) network. Numerical results in typical transportation network show the validity and feasibility of the successive approximation algorithm.
最优路径问题是智能交通系统(Intelligent transportation system,ITS)中路径诱导子系统(Route guidance system,RGS)的核心问题。近年来,交通拥挤、道路阻塞和交通事故的频繁发生正越来越严重地困扰着世界各国的大城市。为了提高运输网络使用效率,解决交通拥挤和交通安全问题,美国、日本和欧盟等发达国家均加大了对智能交通系统的研究。智能交通系统是解决现代社会交通需求与交通供给两者之间矛盾的重要途径之一[ 1]。作为智能交通系统核心子系统之一的路径诱导系统(RGS)是各国竞相角逐的研究热点[ 2, 3],交通网络最优路径问题是路径诱导系统的核心问题之一。
随机网络指网络的边的权值是随机变量。可以描述交通网络行程时间的随机特性。例如,将交通网络中通过某路段的时间耗费看作网络中边的权值,该网络边的权值是不确定的,是一个服从一定概率分布函数的随机变量[ 4]。
随机路径分为两种路径:先验路径和自适应路径,Hall[ 3]在1986年指出自适应路径比先验路径更优,并且给出了小的算例验证了该定理的正确性。2006年Gao and Chabini[ 5]和2012年Gao and Huang[ 8]也对这个结论给出了验证。另外,基于先进旅行者信息系统(ATIS)的车载导航系统(in-vehicle route guidance system)的发展和广泛应用,在线的自适应路径问题越来越受到重视,有必要针对随机网络环境下自适应路径问题展开研究。
在随机交通网络环境下,路径目标策略常常把最小期望值看成是最优策略[ 5, 6, 7, 8, 9],但是最小期望值的路径不能保证方差最小,可能该路径的风险很大,对于风险规避的行驶者是不可取的。大量的实证研究表明行驶者不仅关注行程时间的节省而且关注行程时间的可靠性[ 10, 11, 12, 13]。可靠度作为可靠性理论的重要指标,在工程上已经得到了广泛应用[ 14]。另外一种最优策略是可靠度最大,寻找在给定的预留时间内到达目的地的最大概率的路径。目前,国内外鲜有文献对随机交通网络环境下自适应最可靠路径问题及其求解算法展开讨论,而这正是本研究的目的。首先,建立随机网络模型反映交通网络的耗时随机特性;其次,在此网络环境下基于可靠性理论定义最可靠路径策略和最可靠状态链,并且证明最可靠状态链满足动态规划的Bellman’s准则;第三,构造基于动态规划的逐次逼近算法求解该问题,并且证明该算法是收敛的,且为多项式时间算法;最后,通过MATLAB计算机语言实现了算法程序,并针对实际交通网络:Sioux Falls(SF)network展开数值试验,计算结果验证了该算法的正确性和可行性。
随机网络 G=( N, A,
假设行驶者在决策点 i∈ N,根据当前的状态 xi=( i, b)选择下一个节点,其 i是当前节点, b∈ B是当前的行程时间预算,其中 B是行程时间预算的集合。
定义 N和集合 B的笛卡尔积的集合:
Ω=N×B
自适应路径策略是集合 Ω到集合 N的函数:
μ: Ω→ N
μ( i, b)表示根据当前的状态选择的下一个节点。
假设行驶者根据自适应路径策略 μ: Ω→ N选择的下一个节点是 j,下一个节点的当前状态 xj=
定义状态链 μod={ xo,…, xi, xj,…, xd}为行驶者根据自适应路径策略 μ: Ω→ N在行程中所经历状态的时间序列,其中 xo=( o, b)和 xd=( d,
设 Uμ( xo) =P(
μ*( xo) =argmax
定义1( b-最可靠路径策略).给定行程时间预算 b,路径策略 μ*是 b-最可靠的策略当且仅当
μ*( i, b-x) =argmax
定义2( b-最可靠状态链) .依据 b-最可靠路径策略 μ*所构成的时间序列链{ xi, xj,…, xd}称为 b-最可靠状态链。
定理1 b-最可靠状态链的任意子链都是 b-最可靠状态链。
证明(反证法) 假设{ xi, xj,…, xd}是 b-最可靠状态链,并且它的子链{ xj,…, xk}不是 b-最可靠状态链。因此,存在路径策略 μ'使得对某一个 z∈[0, b), P(
因此: Uμ( i, b) =P
因为对某一个 z∈[0, b),
P
这与假设{ xi, xj,…, xd}是 b-最可靠状态链相矛盾。
定理2在随机网络环境下, b-最可靠状态链不包含回路。
证明(反证法) 假设状态链 μid={ xi,…, xd}和 lid={ xi,…, xi,…, xd}都是 b-最可靠状态链,其中状态链 lid={ xi,…, xi,…, xd}包含了起点和终点都是节点 i的回路。注意任何的回路都可以看成是一个子路径,因此得:
Ul( i, b-y) =
其中 fi-i( x)是回路 i-i随机行程时间的概率密度函数。因为:
Uμ( i, b-x-y)≤ Uμ( i, b-y)
其中不等式成立是因为累积概率分布函数的单调性得到的,因此对∀ y∈[0, b],
其中第一个不等式成立是由累积概率分布函数的单调性得到的,第二个不等式成立是由于
定理1表明可以通过基于动态规划的算法来求解自适应最可靠路径问题,因为 b-最可靠状态链满足动态规划的Bellman’s准则。随机网络环境下自适应最可靠路径问题可以推导为以下形式的问题:
For a given travel time budget b,
∀ i≠ d, x∈[0, b)
∀ i≠ d, x∈[0, b)
μ*( d, b-x) =d,∀ x∈[0, b)。
本节设计基于动态规划的逐次逼近算法求解随机网络环境下自适应最可靠路径问题,如 表1所示,给定行程时间预算 b,寻找 b-最可靠路径策略 μ*( i, b),也就是选择下一个最优节点。
算法在第 k迭代时,
| 表1 算法ORRPP Table 1 Algorithm ORRPP |
定理3 算法Algorithm ORRPP 的迭代次数是有限的。
证明 一方面,由定理2可知, b-最可靠状态链不包含回路。另一方面,在每次迭代 k,
定理4 算法Algorithm ORRPP 的计算复杂度是 O( nb+nmb+mb2),其中 b表示区间[0, b)的长度, m是网络边的总数, n是网络节点的总数。
证明 在Step0,初始化需要 O( nb)的计算复杂度。最复杂的情况是当 k=
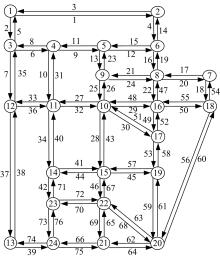
本节数值实验的目标是通过实际网络Sioux falls (SF) network检验算法的可行性和正确性。所有算法都是通过MATLAB计算机语言编程并且在Windows-XP(64)工作站(two 2.00 GHz Xeon CPUs and 4G RAM)条件下运行的。Sioux Falls(SF)network的拓扑结构如 图1所示[ 15]。边的随机行程时间
fij( x) =
其中: αij=0 .4log10(10 +0 .8 i+0 .7 j);
βij=2log10(12 +1 .2 i+0 .8 j)。
Gamma分布的期望值和方差分别是 αij/βij和 αij/
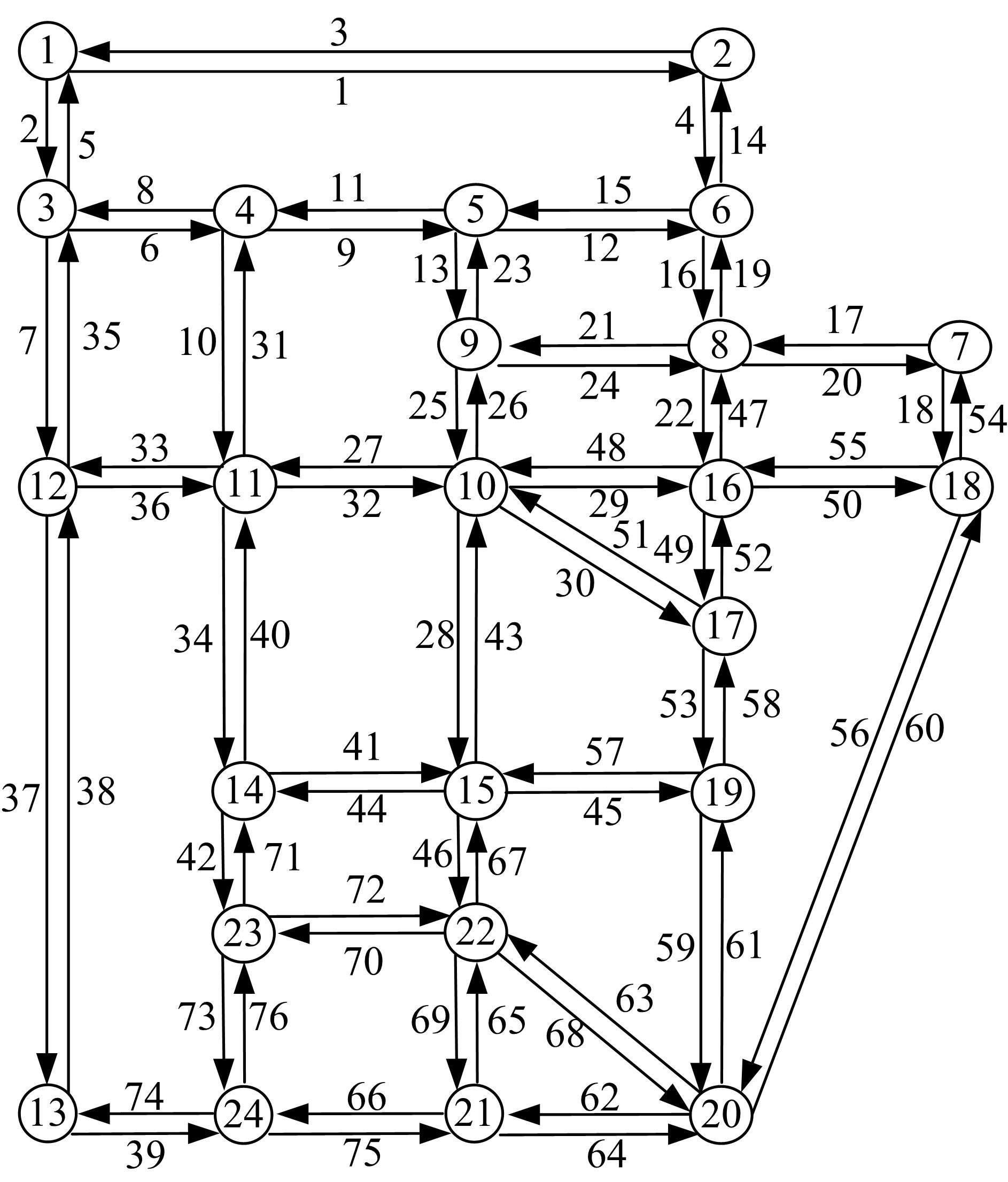 | 图1 苏福尔斯网络Fig.1 Sioux Falls network |
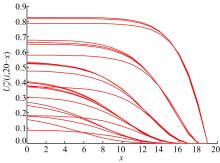
图2表示从节点 i=1,2,…,23时刻出发在 b-x( b=20)时间内到达终点 N=24的最大概率值
 | 图2 |
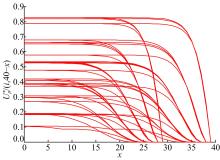
 | 图3 |
 | 图4 |
从以上的计算结果可以得出以下结论:
(1)函数
(2)在给定起点和终点的情况下,所有的
(3)因为本算例中边的权值的概率分布函数都是假定为Gamma概率分布函数,所以当终点一致起点 i的位置相邻近时,
研究了基于可靠性理论的随机交通网络自适应最可靠路径问题。证明了该问题满足动态规划的Bellman's 准则, 构造了逐次逼近算法求解该问题。通过对实际交通网络的计算对提出的方法进行了验证。结果表明, 结合用户的不同行程时间预算,提出的算法可以获得随机交通网络的最可靠路径。但是,本文只考虑了行程时间的随机特性, 没有涉及动态特性, 动态随机交通网络环境下最可靠路径问题需要进一步研究。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|