

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
双振子垂直驱动式压电振动送料器的设计
[沈燕虎1  , 苏江
, 苏江1 , 刘勇2 , 杨志刚2 , 王坤坤1 ]
, 苏江, 杨志刚|
|


作者简介:沈燕虎(1987-),男,博士研究生.研究方向:压电驱动以及精密驱动技术.E-mail:shenyanhu0525@163.com
利用压电陶瓷的逆压电效应,采用上下两个环形压电振子垂直驱动的结构,设计了一种新型压电振动送料器。通过理论分析得出了送料器系统的固有频率以及影响料斗振幅的主要因素。利用Hypermesh软件对整个系统进行了动力学仿真,分析了系统的前三阶振型并得出了系统无阻尼固有频率的理论值为110.95 Hz。采用M5螺母为输送物料对样机进行了试验,分析了输送速度以及料斗振幅与驱动电压和驱动频率的关系,并与现有同型号悬臂梁式压电振动送料器进行了性能对比。当驱动电压为240 V、驱动频率为系统实际共振频率105 Hz时,该新型结构压电振动送料器的输送速度为0.23 kg/min,料斗振幅为110 μm,可以满足工业生产的需求。
A novel piezoelectric vibratory feeder was designed, which was driven by two vertically arranged rotary piezoelectric vibrators, where the inverse piezoelectric effect was utilized. By theoretical analysis, the nature frequency of the feeder system and the factors influencing the hopper's amplitude were obtained. The software Hypermesh was used to simulate the dynamics of the system, and the first three order vibration modes were achieved, from which we got the theoretical nature frequency of the system without damping to be 110.95Hz. Experiments on this feeder and on the same model cantilever piezoelectric feeder were carried out using M5 nuts as the conveying materials. From the experiments we got the relationship among the delivery speed, hoper amplitude, driven voltage and frequency. When the driven voltage was 240V and the frequency was 105Hz, the delivery speed of this new piezoelectric vibratory feeder was 0.23kg/min and the hopper amplitude was 110μm, respectively, which could meet industrial production requirement.
送料器是自动化生产线的重要组成部分,其主要功能是把待加工工件按照特定姿态排列整理出来,并定时、定量地输送到特定加工位置[ 1]。送料器按其驱动方式可分为传统的电机式、电磁式以及新型的压电式[ 2];按送料方式又可分为螺旋式和直线式[ 3]。其中电磁振动送料器由于送料效率高、承载能力大、驱动能力强等特点在工业中得到了广泛的应用,相关的理论研究也较为成熟[ 4, 5, 6, 7, 8]。近年来随着微电子、食品、医药等行业的快速发展,晶体管、半导体等轻质微小工件以及严格要求环境清洁的药物等物料的自动化生产和装配量日益增大,整列和输送的精密化、快速化要求也越来越高。传统的电机式和电磁式送料器由于振动幅度大、送料精度低、相似物料不能分选、噪音高等缺点[ 9]已不能满足这些产品的生产要求,在这种情况下利用压电陶瓷微振幅驱动的送料器就应运而生了。
早在1977年,日本特殊陶冶株式会社就发明了压电振动搬送装置。近年来日本SANKI公司进一步开发和应用了多种型号的悬臂梁式压电振动送料器,并且在很多领域已经代替了传统的电磁式振动送料器[ 10, 11, 12],在压电式送料器领域垄断至今。国内对压电振动送料器的研究起步较晚,整体水平比较落后,但近年来也开始了相关研究[ 13, 14, 15, 16],其中吉林大学研制出了直线式、惯性式、横推式等多种新型结构的压电振动送料器[ 17, 18, 19, 20, 21]。
本文在以往研究的基础上,提出了一种新型结构的压电振动送料器,该结构采用垂直布置的两个环形压电振子提供激励,大大增强了送料器的承载能力,减小了压电陶瓷的变形,延长了压电陶瓷的使用寿命。通过对送料器的理论分析和实验测试,证明了该结构的可行性。
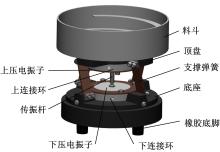
双振子垂直驱动式压电振动送料器的结构图如 图1所示,其主要由料斗、顶盘、传振杆、支撑弹簧、连接环、底座、上下压电振子、橡胶底脚等组成。
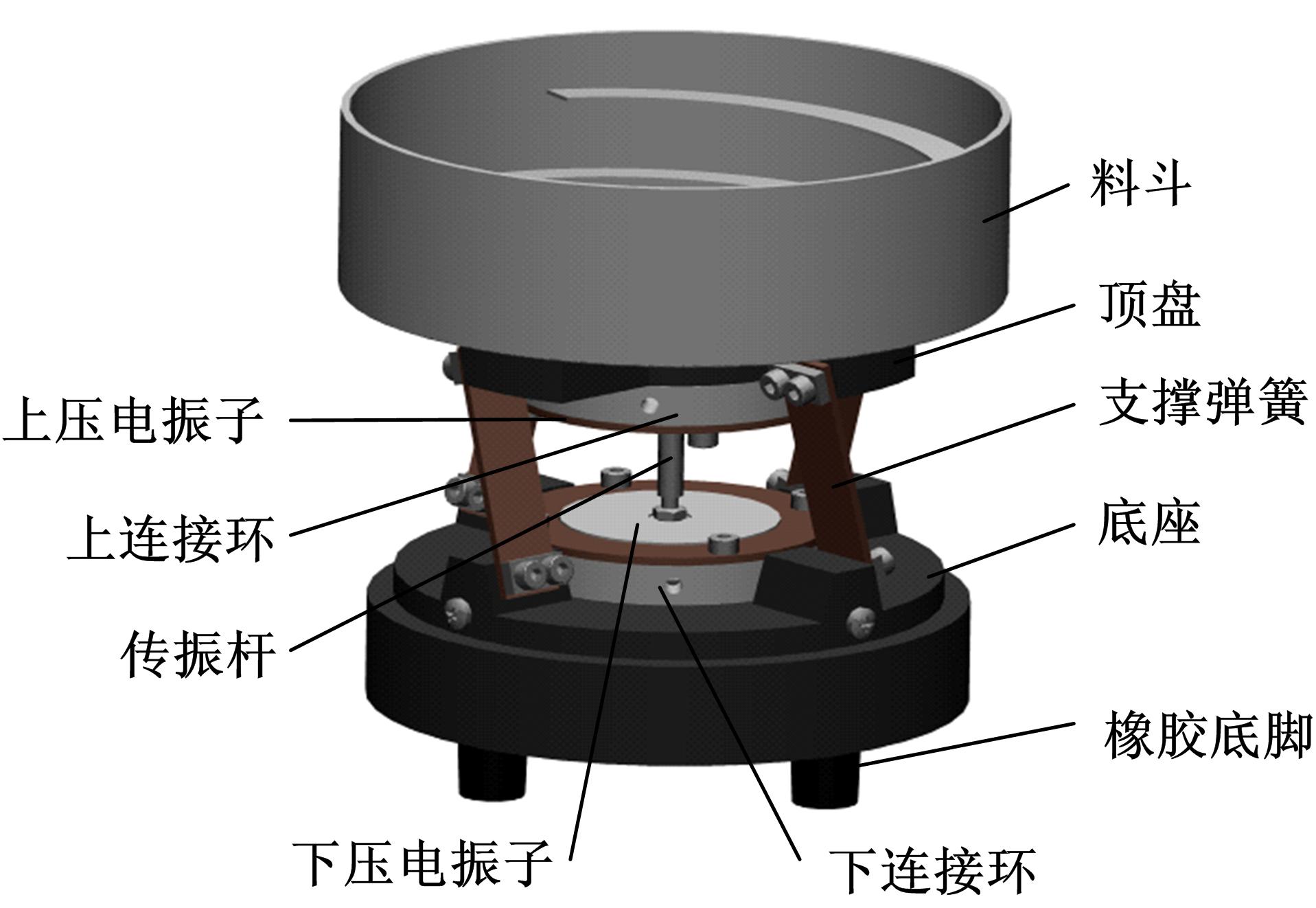 | 图1 振动送料器的三维结构图Fig.1 The 3D diagram of the vibration feeder |
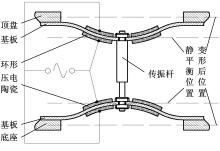
该送料器的工作原理是:给上、下环形压电双晶振子施加正弦交流电压,压电陶瓷由于逆压电效应促使压电振子产生微小的交变凹凸变形,即微小激励,如 图2所示。该微小激励通过垂直放置的传振杆传至顶盘和底座,由于受到与顶盘和底座连接的四片斜置支撑弹簧的约束,导致顶盘和底座同时产生垂直方向振动和绕其中心轴线的扭转振动。这就使得与顶盘紧密连接的料斗除了其中心轴线以外,各点都沿着各自的一小段空间螺旋线轨迹进行高频微幅振动。通过数字调频调压控制器调节压电振子的驱动电压和频率,当驱动频率和系统固有频率相同时,整个系统达到共振状态。此时,压电振子的微小激励通过传振杆和四片支撑弹簧的传递和放大,使得料斗获得了较大的振动幅度和强度——输出位移和输出力,从而形成了输送物料的能力。经过特制料斗轨道的筛选,物料即可按照所需的运动状态依次平稳地通过出料口。
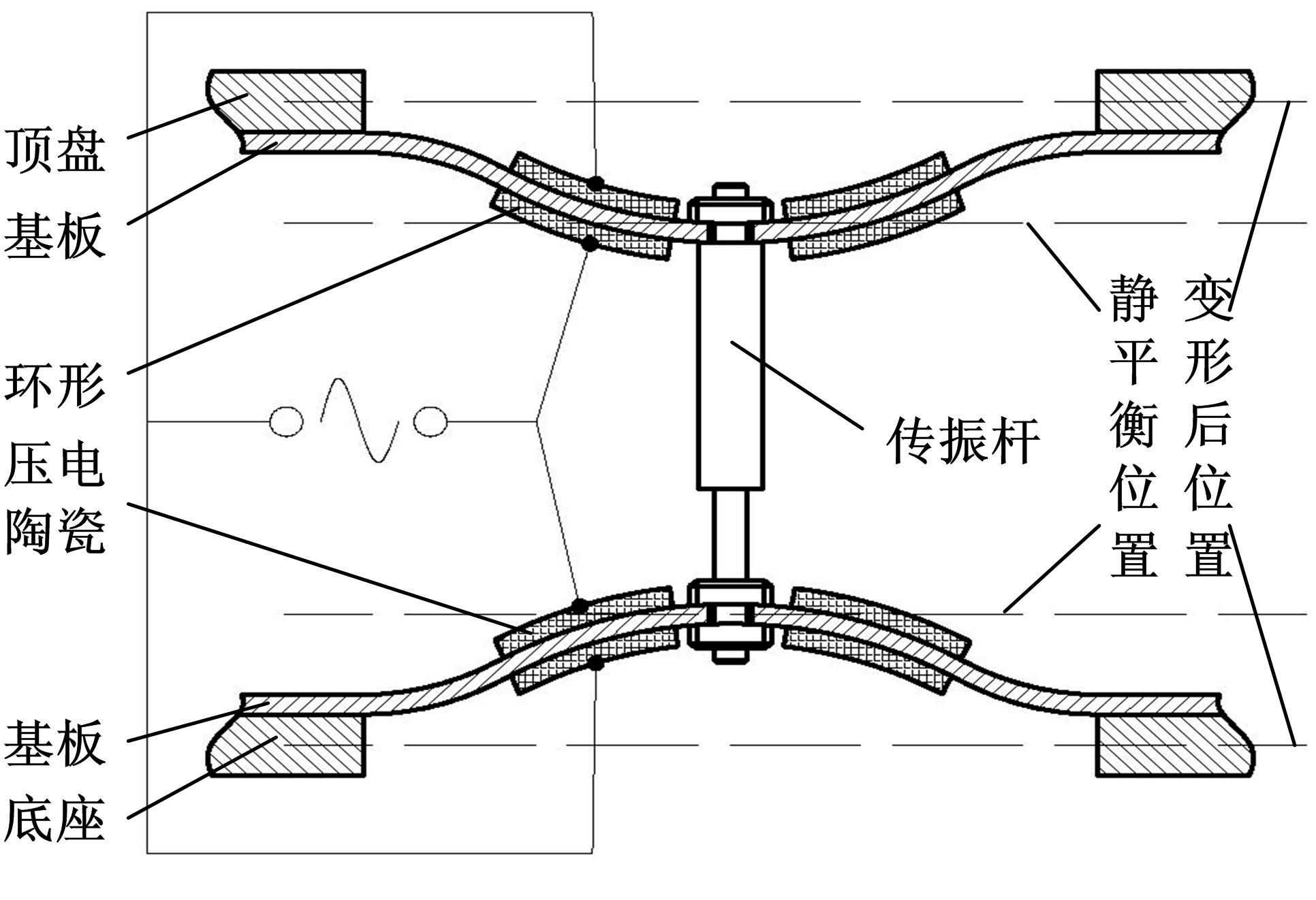 | 图2 上下压电振子的变形Fig.2 Deformations of the two vibrators |
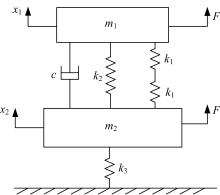
根据振动力学理论将双振子垂直驱动式压电振动送料器系统简化为如 图3所示[ 22]的动力学模型,其中 m1为料斗、物料和顶盘的等效质量; m2为底座、支撑弹簧、传振杆等部件的等效质量; k1为压电振子的刚度; k2为支撑弹簧的刚度; k3为橡胶底脚的刚度; k为 k1与 k2的等效刚度; F和 U为压电振子提供的激振力和激励位移且; F=k1 Usin ωt; ω为激励频率。
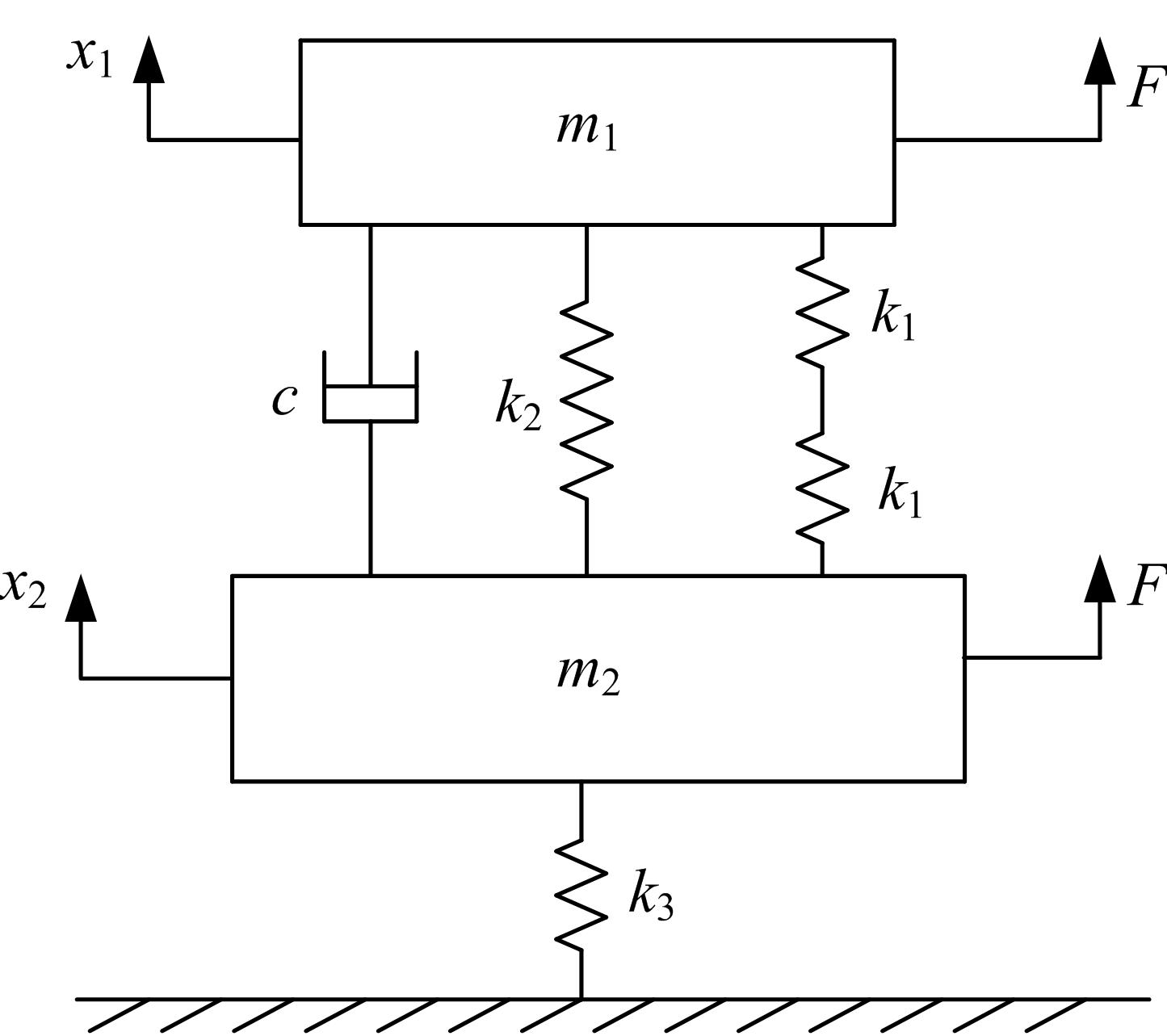 | 图3 系统振动模型Fig.3 Vibration model of system |
把质量 m1和 m2的静平衡位置作为坐标原点,在振动过程中的任一时刻 t,质量 m1和 m2离开各自平衡位置的位移分别为 x1和 x2。应用牛顿第二定律可得如下运动微分方程:
如果不计阻尼,即 c=0,方程(1)可以简化为:
由于 k1和 k2远远大于 k3,故假设 k3 =0,由此可得系统的固有频率 ωn为:
式中: k=k1 /2 +k2。
由式(3)可知,整个振动系统的固有频率主要取决于支撑弹簧和压电振子的刚度以及底座、顶盘、物料和料斗等的质量。橡胶底脚和系统阻尼等因素虽然对系统也有一定的影响,但在试验过程中发现这些因素对系统影响相对很小,同时为了使理论计算更直观并突出主要因素,故将这些次要因素忽略不计。
假设 m1和 m2以相同的频率 ω作简谐运动,则:
式中: X1、 X2为 m1和 m2的振幅。
把式(4)带入式(2)可得 m1和 m2的振幅为:
由式(5)可知, m1和 m2的振幅都与压电振子的刚度和位移之积——输出力成正比,并与各自的质量成反比。实际工作中既要使得料斗输送性能达到最佳,即 X1的数值尽量大,又要使得整个系统的振动尽可能小地传递给机架,即 X2的数值尽量小。为了同时满足这两方面的要求,一般取 m2 =2 .5 ~3
当 ω2 =
模态分析主要用来确定机械结构的振动特性,也就是机械结构的固有频率和振型,是谐响应分析和瞬态动力学分析等其他动力学分析的基础。
利用Hypermesh软件对整个送料系统进行振动模态分析。由于系统结构比较复杂,因此对整机采用映射网格划分,对压电陶瓷采用SOLID5单元类型,其余零件采用SOLID45单元类型。模态分析用到的材料属性如 表1所示,料斗、传振杆和底座的材料采用45钢;顶盘和连接环的材料采用LY12硬铝;压电振子的基板和支撑弹簧的材料采用65Mn弹簧钢。
| 表1 材料属性表 Table 1 Material attribute |
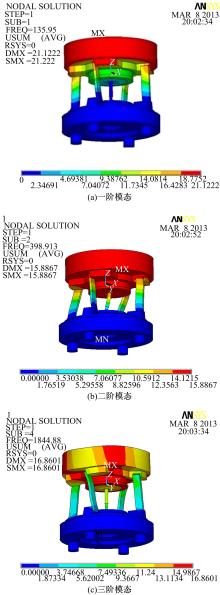
在模态分析过程中,ANSYS提供了7种模态提取方法。本文采用的是Block Lanczos法,即分块兰索斯法。四个橡胶底脚上施加全约束,然后进行求解。得到系统的前三阶固有频率如 表2所示。由此,依次读取整机振动模态分析的前三阶节点位移云图,如 图4所示。
| 表2 系统理论固有频率 Table 2 Theoretical nature frequency of the system |
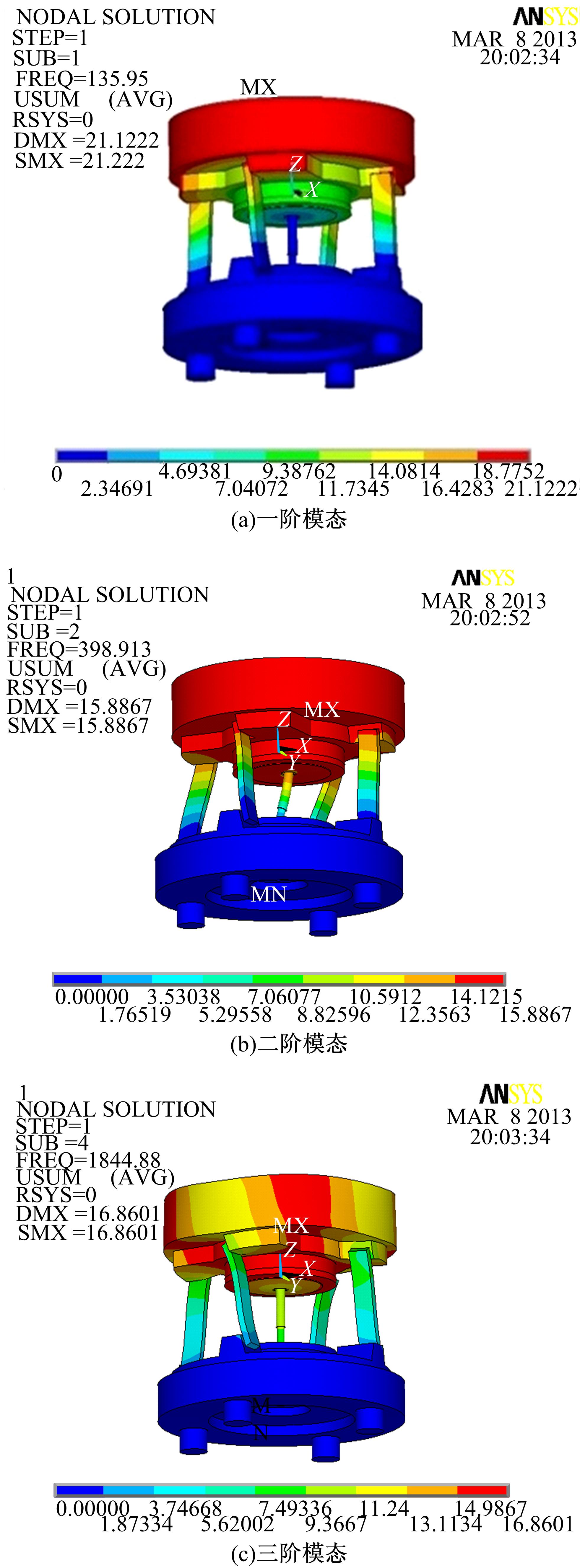 | 图4 系统的前三阶振动模态Fig.4 The first three order vibration modes |
图4中红色部分表示振幅最大,一阶振型中主要是垂直方向和扭转方向的振动;二阶振型中除去垂直方向和扭转方向的振动之外还伴随着摆动振动;三阶振型中主要是料斗自身振动。因此,一阶振型与系统实际振动情况最接近,此时整机的理论固有频率为110.95 Hz。
双振子垂直驱动式压电振动送料器的试验采用M5螺母为输送物料,主要针对以下三方面进行研究。
(1)频率特性:是指系统的物料输送速度以及料斗振幅与驱动频率的关系。
(2)电压特性:是指系统的物料输送速度以及料斗振幅与驱动电压的关系。
(3)对比试验:是指本结构样机与现有同型号悬臂梁式压电振动送料器的相关参数对比。
试验中采用的驱动电源为南京创优虎科技有限公司生产的SDVC40数字调频调压控制器;料斗振幅测量采用的是日本基恩士公司生产的Keyence LK—H020型号激光测微仪;对比设备采用的是日本SANKI公司生产的PEF230A型号悬臂梁式压电振动送料器。
将数字调频调压控制器的输出电压调整为220 V,在40~200 Hz频率范围内每间隔2 Hz测量送料器系统在1 min内输送物料的质量以及相应的料斗振幅,并绘制如 图5所示的特性曲线。
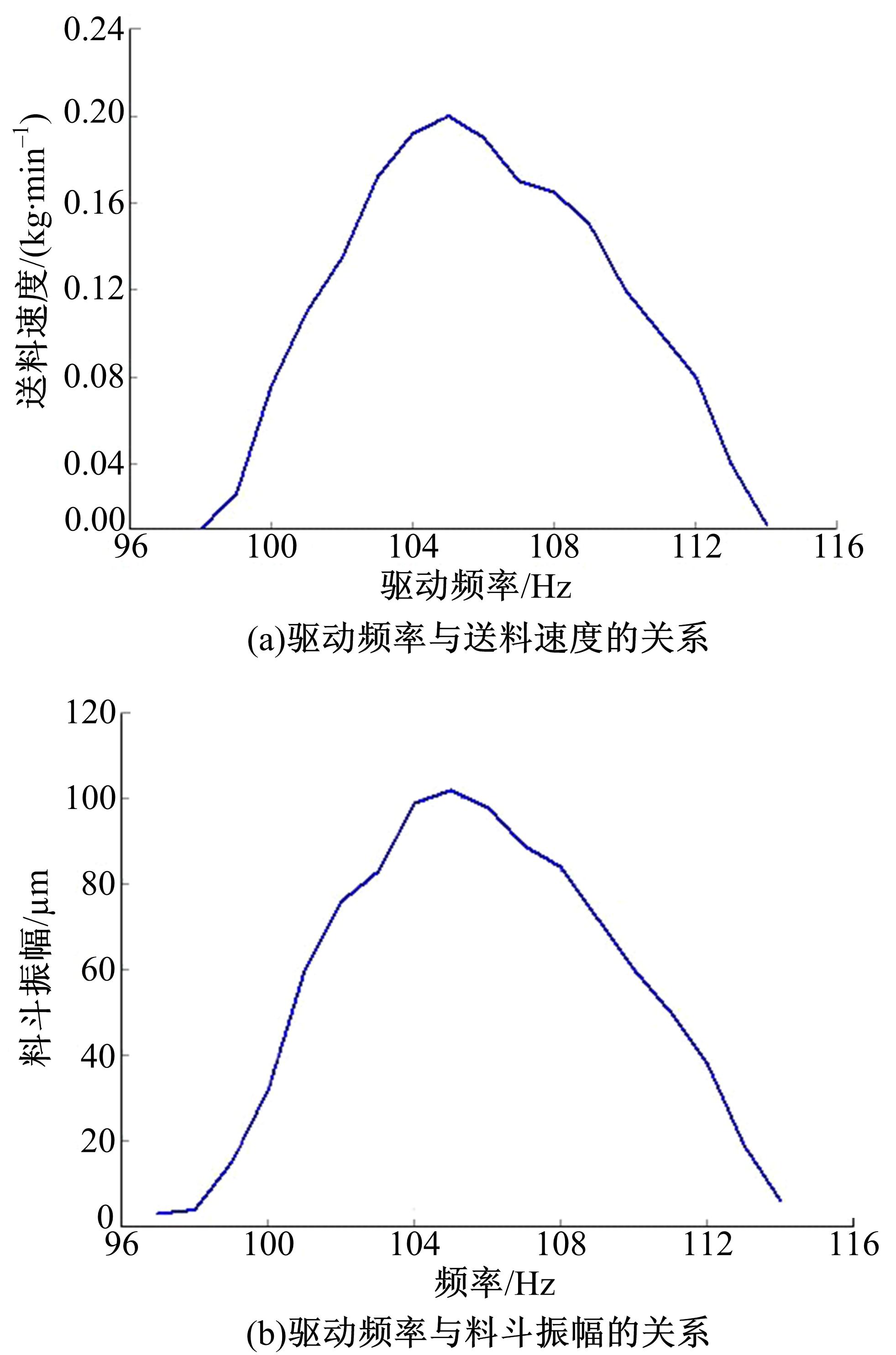 | 图5 驱动频率与送料速度、料斗振幅的关系Fig.5 Relation curves of frequency and speed,amplitude |
由 图5可知,整个振动送料系统的实际共振频率为105 Hz,此时系统的送料速度和料斗振幅达到最大值,分别为0.2 kg/min和100 μm。以系统谐振频率为中心,随着频率的增加和减小,物料输送速度和料斗振幅都明显下降。当频率小于96 Hz或者大于115 Hz时,料斗振幅只有几微米,物料基本停止输送。因此低于96 Hz和高于115 Hz的曲线没有实际意义,图中没有给出。
在系统振动模态分析中得到的理论共振频率为110.95 Hz,而实际共振频率为105 Hz,二者的误差来源主要是理论分析时忽略了系统阻尼和橡胶底脚的影响,因此这种误差是预期之内的。
将数字调频调压控制器的驱动频率调节为系统的共振频率105 Hz,驱动电压为0~240 V。每间隔20 V电压,对系统的送料速度以及相应的料斗振幅进行测量,并根据测量结果绘制如 图6所示的驱动电压与送料速度、料斗振幅的关系曲线。
 | 图6 驱动电压与送料速度、料斗振幅的关系Fig.6 Relation curves of voltage and speed,amplitude |
由 图6可知,系统输送速度和料斗振幅随着驱动电压的增大而不断增大,几乎近似为线性关系。当电压低于40 V时,料斗几乎停止振动;当电压为40~60 V时,料斗开始微小振动,但是由于振幅较小,仍然起不到输送物料的作用;当电压高于60 V时,物料开始缓慢的向前运动,随着电压的增大,输送物料的速度越来越快。当电压达到最大值240 V时,物料的输送速度为0.23 kg/min,料斗的振幅为110 μm。
在工业实际使用过程中考虑到压电陶瓷的耐压性和使用寿命,一般驱动电压都控制在220 V以下,以免在高压下压电陶瓷被击穿或者由于变形太大而破碎失效。
采用日本SANKI公司的同型号(PEF230A)悬臂梁结构产品[ 2]与本结构样机进行参数对比。调整系统驱动电压均为220 V,驱动频率为各自共振频率,料斗和物料均相同。二者的额定载荷和输送速度以及相关结构参数如 表3所示。
| 表3 样机与悬臂式压电送料器参数对比 Table 3 Parameters comparison between prototype and cantilever piezoelectric feeder |
由 表3可知,样机的整机质量偏大,但高度降低了近30 mm,这使得在一些空间有限的场合下使用更加便利。相同使用情况下,样机的共振频率比PEF230A降低了60 Hz,样机的物料输送速度、料斗振幅、功率消耗与PEF230A基本一致,但样机的额定载荷有所提高。通过对比可以确定该结构样机可满足工业生产的实际需求。
(1)利用压电陶瓷的逆压电效应,采用上下两个环形压电振子垂直布置的结构,设计了双振子垂直驱动式压电振动送料器,经过理论分析和试验研究验证了该结构的可行性,其输送物料的效果可以达到工业生产的需求。
(2)通过对送料系统振动模型的建立和分析,从理论上推导出了系统固有频率以及影响料斗振幅的主要因素。系统固有频率主要取决于压电振子和支撑弹簧的刚度以及料斗和底座等的质量,当系统中这些参数确定后,系统固有频率就是一个恒定的数值。料斗振幅主要与压电振子的输出力成正比并与其自身的质量成反比,因此为了提高料斗振幅一般采用加大驱动电压或者减小料斗质量的途径,并通过调整底座的质量来减小振动系统对机架的影响。
(3)根据送料器的实际工作情况,对振动系统进行了振型仿真和分析,并得出了系统的前三阶位移节点云图。其中,第一阶振型与实际工作情况最符合,此时系统的理论固有频率为110.95 Hz。
(4)通过对双振子垂直驱动式压电振动送料器样机进行试验研究,证明该结构送料器的送料速度、料斗振幅与系统驱动电压近似成正比关系,电压越大,振动幅值越大,输送速度也就越快。当驱动频率为系统共振频率105 Hz,驱动电压为240 V时,系统的输送速度可达到0.23 kg/min,料斗振幅可达到110 μm。当系统驱动频率和其固有频率相等时送料器的输送速度和料斗振幅达到最大值,但系统的工作频率带很窄,只在96~115 Hz频率范围内有效,当偏离这个范围时,送料器基本停止工作。
(5)由 图5和 图6可以直观地看出:无论是系统的电压特性还是频率特性,物料的输送速度曲线和料斗的振幅曲线形式基本一致,因此可以得出,物料的输送速度与料斗的振动幅值成正比。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|