基于故障在线估计的可重构机械臂分散容错控制
 , 李成浩
, 李成浩 Online fault estimation based on decentralized fault-tolerant control for reconfigurable manipulators
ZHAO Bo1, 3 , LI Cheng-hao2, 3 , LI Yuan-chun1, 3
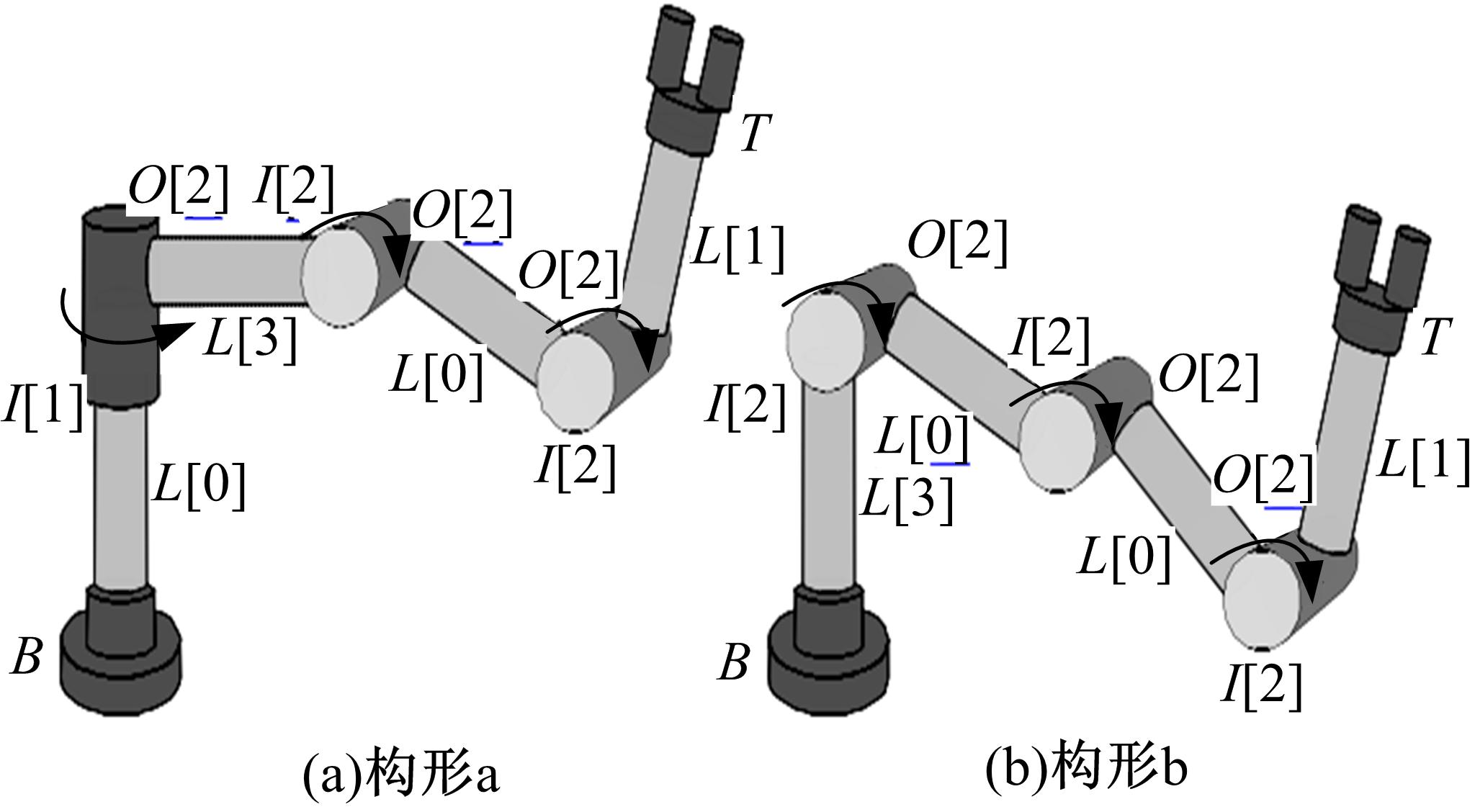
, LI Cheng-hao Fig.1 Configurations of 3-DOF reconfigurable manipulators