

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
路网移动对象聚集索引技术
[冯钧1  , 史涯晴
, 史涯晴1, 2 , 唐志贤1 , 芮彩华1 ]
, 史涯晴, 唐志贤|
|


作者简介:冯钧(1969-),女,教授,博士生导师.研究方向:时空间信息检索.E-mail:fengjunhhu@gmail.com
结合能够解决重复计数问题的Sketch技术和能够以较小存储空间获得高效近似聚集查询结果的AMH+技术,借鉴aCN-RB-tree支持方向属性聚集的特性,提出了DSD+动态草图索引结构,解决了路网环境下移动对象的聚集查询问题。性能分析和试验结果表明:与现有的索引结构相比,DSD+在保证查询时间和查询误差优势的基础上显著减少了存储空间。
A new index structure, DSD+, which is the dynamic sketch with direction index, is proposed to solve the problem of aggregate query of moving objects in the road network environment. This technique combines the sketch technology, which can solve distinct counting problem, and the AMH+ technology, which can give out efficient approximate aggregate query results with smaller storage space; and utilizes the characteristics of aCN-RB-tree that supports aggregate by the direction property. The performance analysis and the experimental results show that, with the same query time and precision, the query storage space of the proposed DSD+ index structure is less than that of existing index structures.
以交通调度为目的的交通监控系统,除了对特定车辆的监控外,更加关注道路网上车辆聚集信息的获取,如每个路段上交通流量、平均速度等信息。道路网上的信息是以数据流的形式存在的,如果对每条信息都进行存储和处理,存储空间需求巨大。即使能存储这么多数据,对如此庞大的数据进行处理也需要很大的时间开销,将无法满足智能交通系统对路网进行实时监控、调度的要求,所以对道路网上的数据流进行聚集查询一般采用近似处理技术,属于时空数据库中移动对象的聚集查询范畴,如查询下班高峰期17时到18时期间,某一路段有多少辆车通过,以分析该时段该路段上的交通拥挤情况,从而适当地调整该路口的交通信号灯或为驾驶员提供实时导航,来减轻交通拥挤情况。研究者提出了许多移动对象时空间聚集索引法,比较典型的有:aRB-tree[ 1]、Sketch[ 2, 3]、AMH[ 4]。aRB-tree索引结构存在重复计数问题[ 5];Sketch索引结构利用草图之间的OR运算解决了重复计数问题,但是该索引结构仅适用于欧氏二维空间;AMH通过智能划分空间,将道路网上非均匀分布的移动对象划分到不同的桶中,使每个桶内的移动对象分布均匀,解决了移动对象的非均匀分布问题,但仍存在重复计数问题。两个改进版本AMH*[ 6]和AMH+[ 7]具有低空间复杂度、高查询质量的优点。DS[ 8]索引结构利用AMH*[ 6]技术对Sketch[ 5]进行划分,并且结合具有路网特性的Sketch-RR-tree[ 6]索引结构。但是DS索引结构未考虑路网方向问题,且AMH*添加的对桶的约束条件限制较严格,数据存储的开销较大。DS索引结构只支持count查询,无法对average等其他类型进行近似聚集查询。虽然也有索引结构[ 9, 10]考虑了对象的轨迹、方向等,但这些结构是基于整个网络的,而不是基于某个区域路段,而且不能很好地支持聚集查询。
本文采用AMH+[ 7]技术智能划分结合了Sketch技术的支持方向属性聚集的aCN-RB-tree[ 11],提出了一种考虑方向的路网移动对象时空间聚集索引结构DSD+(DynSketch+with Directions),并将其应用于路网上以支持 sum( qT, qR)(时间区域为 qT,空间区域为 qR的车辆数之和)和 avg( qT, qR)(时间区域为 qT,空间区域为 qR的平均车辆数)两种桶的数据聚集查询。
DSD+索引结构首先将空间划分为2 n×n个部分,并将所有栅格划分为若干桶,桶内的数据分布均匀,当有数据分布发生变化时,则以特定的约束条件[ 6]来分裂或合并桶,从而提高查询质量。在将栅格划分为若干桶时,由于希望数据分布相近的栅格能划分在一个桶中,因此,本文针对路段建立一个BPT(Binary partition tree)树,数据以多维直方图方式保存和处理,对于某路段 rid两个方向的数据分别存放在划分空间的如下位置上:
( ridL/( n*2), ridL%( n*2))
( ridR/( n*2), ridR%( n*2))
任一桶 bk可以表示为一个七元向量( R, nk, fk, gk, vk, hnk, skt), R代表矩形范围,以桶的左下角和右上角坐标表示; nk为 R矩形范围中对象的数目; fk为该桶内各个栅格的平均频度, fk=(1 /nk)∑∀ c∈ RFc; gk为该桶内各个栅格频度的平均平方和, gk=(1 /nk)∑∀ c∈ R
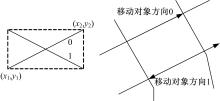
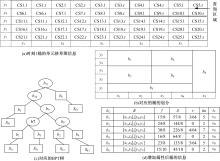
对于一个路段的 dn方向属性,假定其值域为{0,1}。如 图1所示,本文对于 dn的取值这样定义:对于某个路段,如果移动对象从最左边进入,则 dn取值为0;如果对象从最右边进入,则 dn取值为1。特殊情况,当这个路段是垂直路段时,若对象从底部进入,则 dn取0;若从顶部进入则取1。为了对双向聚集值进行索引,本文针对两个方向的车辆情况创建多维直方图结构。在时间戳1,DSD+索引结构如 图2所示, 图2(a)给出的是对每个栅格内的车辆进行草图化后的草图信息CS i,而不像AMH+结构那样,直接存储的是该栅格内车辆的实际数量。然后根据FM_PCSA算法计算出各个栅格的近似车辆数,将车辆数相近的栅格划分在一个桶中,如 图2(b)所示,每个桶都有一些附加的统计信息,如 图2(d)所示,也就是前面提到的七元向量。 图2(c)是对应的BPT树,在计算某个时刻某桶内车辆近似数时,不是简单地进行求和运算,而是采用Sketch思想进行草图的或运算,以此解决重复计数问题,提高查询精度。
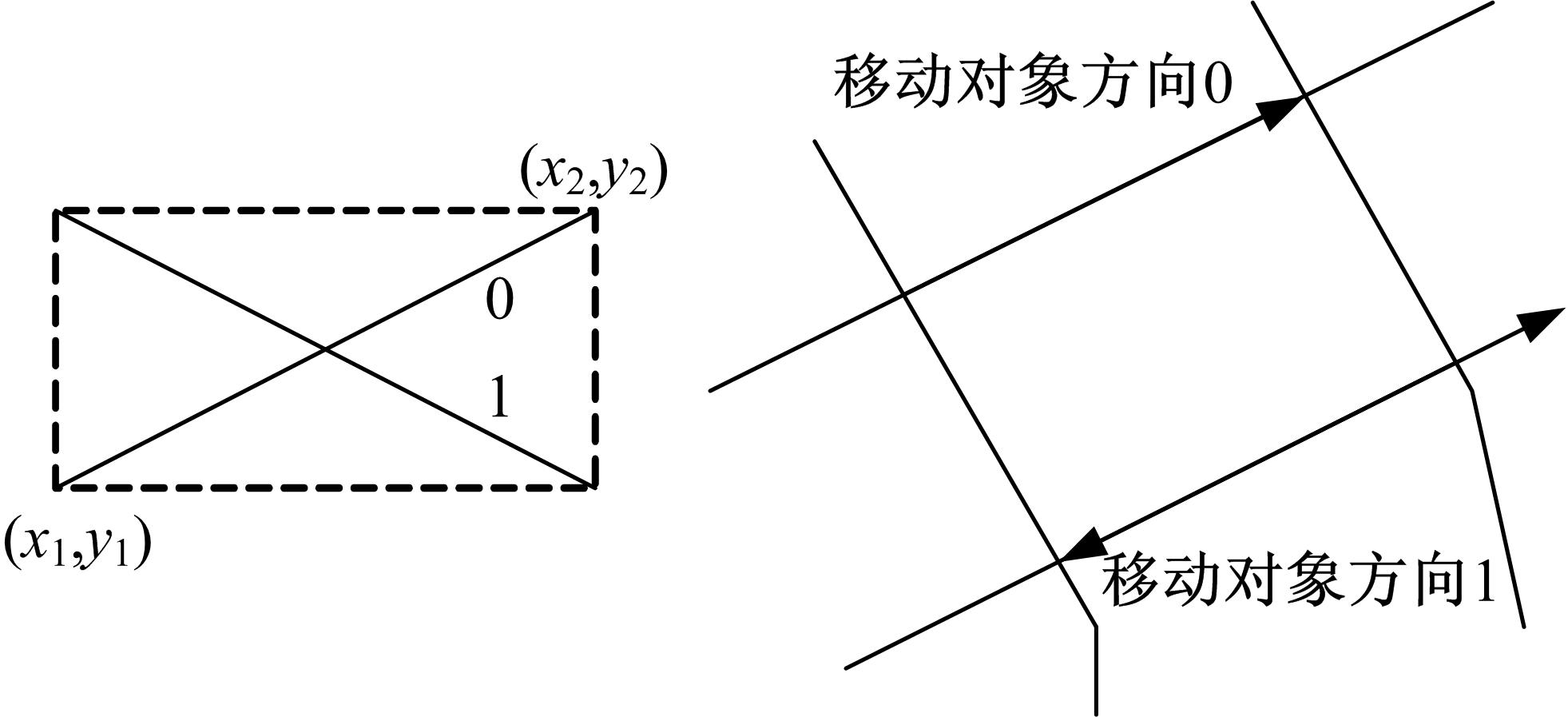 | 图1 路段方向标识图Fig.1 Direction identifies of road segment |
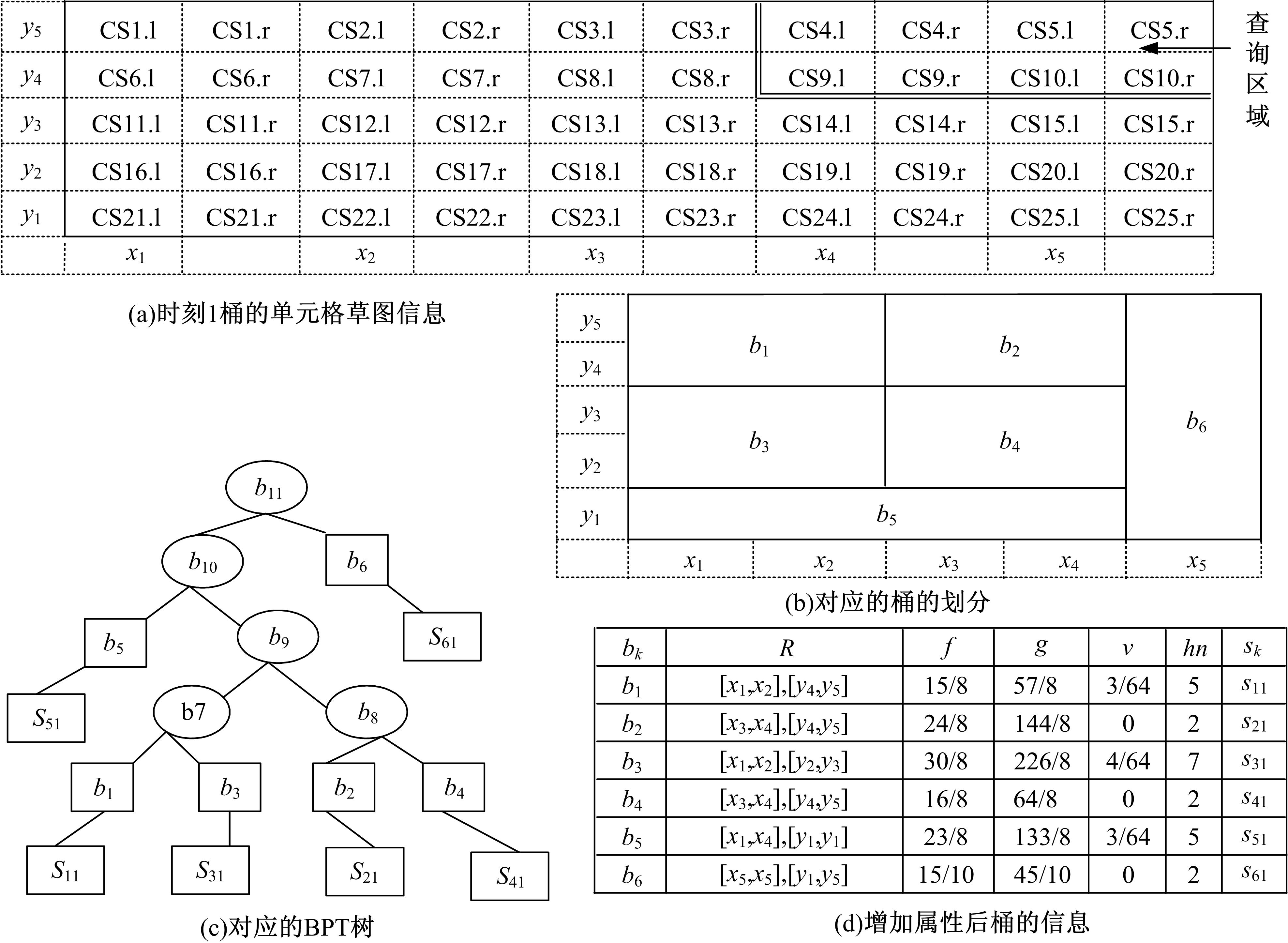 | 图2 DSD+索引结构Fig.2 Structure of DSD+ |
图2(c)中的BPT树用以索引 图2(b)中的桶,与AMH+不同的是其叶子节点存储的是每个桶的草图信息,在构建带有方向属性的BPT树的过程中,初始仅仅包含一个叶子节点,整个空间区域就是一个大的桶,然后根据桶的约束条件,决定是否要进行桶的分裂或者合并,在建立索引结构时,BPT树上叶子节点上的草图信息并不单独为其分配空间,而将其作为一项属性保存在 图2(d)桶的信息中。
DSD+索引结构的聚集查询算法能通过 direction属性值查找受限路网中路段某个特定方向的聚集值,更符合实际路网中的应用需求。
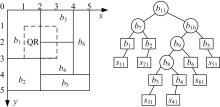
如 图3所示,桶中的虚线框为查询区域,该桶存储的是所有路段 direction=0方向的草图信息,查询的时间段为[1,2],查询区域如 图3所示,右边为时间戳为1时,增加草图信息后的BPT树结构。查询时给出( x_min, x_max, y_min, y_max, t_max, dn),前4个给出的是虚线框查询区域的边界点坐标,接下来是查询的时间段,最后一个为查询的方向,以便在正确的BPT树上进行查找。
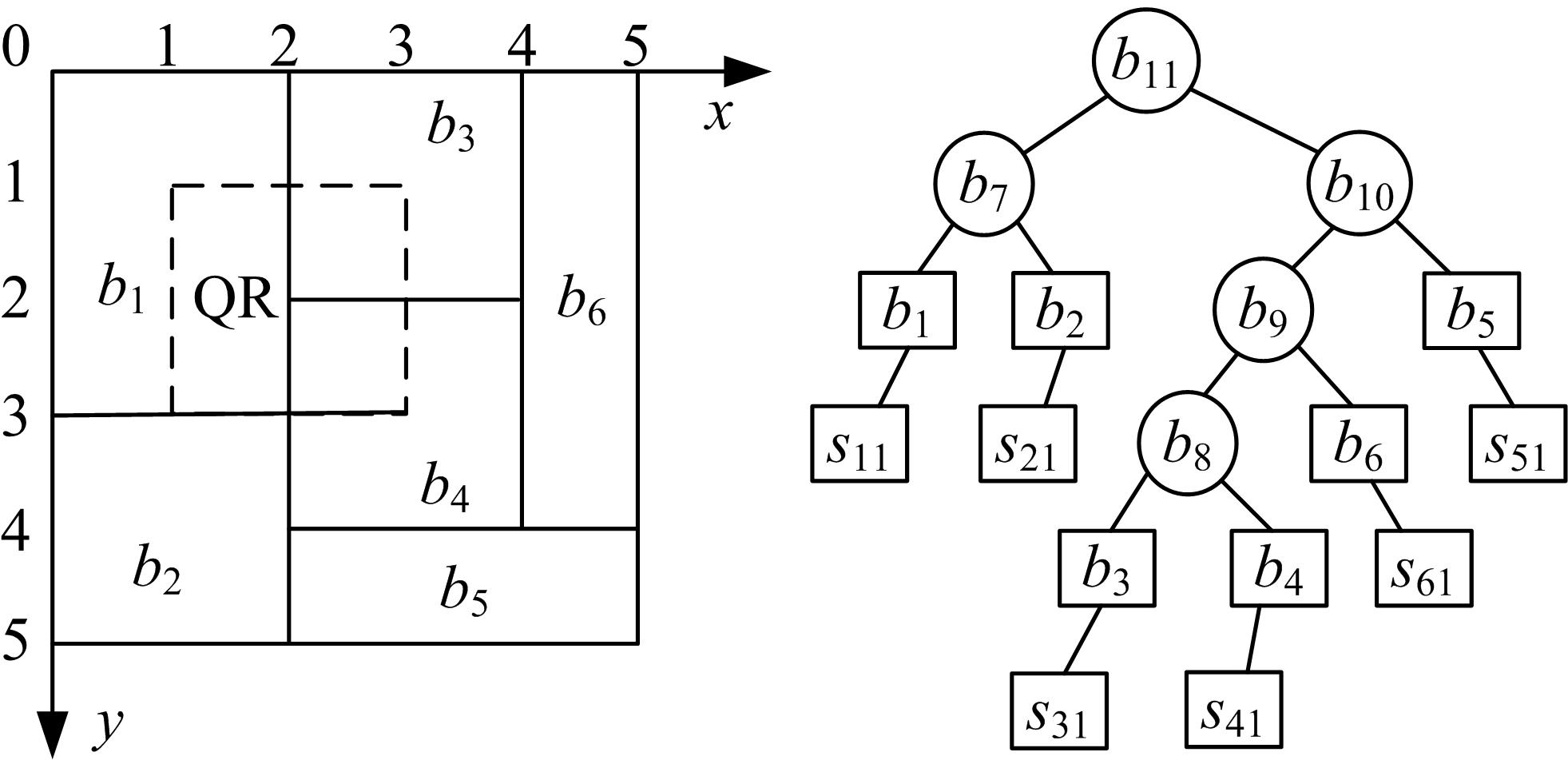 | 图3 DSD+索引结构查询举例Fig.3 Example of query based on DSD+ |
查找时,直接从根节点开始中序遍历查找,图中从根节点 b11开始,由于它为中间节点,且其分裂标识为 y_flag=2,而查询区域为(1,3,1,3),分裂标识在其区域内,因此, b11的左右子树都需要访问,根据中序遍历的非递归算法,先将 b11存储在栈中,然后访问它的左子树,左子树处理完后, b11再出栈,处理它的右子树。处理左子树时,由于 b7也是中间节点,但是其分裂标识为 x_flag=3,因此,查询区域在 b7的左子树,也就是 b1,而 b1为叶子节点,求出桶 b1与查询区域QR的相交部分的面积,设为 R1,同时对当前查询到的桶进行时刻1和时刻2对应草图的OR运算,得到 s1,即 s1 =s11 OR s12,根据FM_PCSA算法求出在时间戳1和时间戳2范围内,去除重复计数后的车辆数聚集结果,设为 num1,同时根据桶的平均频率计算出与查询区域相交的车辆数量为 f1 ×R1 /n1,接着 b11出栈,遍历其右子树,用同样的方法找到与QR相交的叶子节点 b3和 b4,分别求出其与QR相交部分的面积 R3和 R4,以及对应桶两个时间戳草图信息的或运算,即 s3 =s31 OR s32和 s4 =s41 OR s42,再根据FM_PCSA计算出它们去除重复计数后的车辆数,分别记为 num3和 num4,与查询区域相交区域的车辆数分别为 f3 ×R3 /n3和 f4 ×R4 /n4,最后将所有草图进行或运算得到 s=s1 OR s3 OR s4,根据FM_PCSA计算出其近似估计车辆数为 N。
遍历结束后,怎样整合出最终查询结果是本文要研究的问题,显然,不能直接将与查询区域相交部分的车辆数直接相加,得到 allnumber=f1 ×R1 /n1 +f3 ×R3 /n3 +f4 ×R4 /n4,而不同的桶所采用的草图张数也可能不一样,因此也不能直接将草图进行OR运算来解决重复计数问题,本文采用的是在 allnumber基础上减去所有与查询区域相交部分的平均重复计数的车辆数,记为( n1 +n3 +n4 -N) ×( R1 +R3 +R4) /( Rb1 +Rb3 +Rb4),最终,针对 图3的查询结果为 allnumber-( n1 +n3 +n4 -N) ×( R1 +R3 +R4) /( Rb1 +Rb3 +Rb4),换言之,聚集查询的结果是在基本的求和得到的 allnumber基础上减去一个平均重复计数。
试验采用Geographic Data Technology Inc 1999年采集的美国加利福尼亚州公共交通路网数据,地图比例为1∶24000,路网的平均密度为1451 路段/km2。首先截取784个路段,然后采用浮动车技术模拟生成10000辆车,车有car、bus、truck和autobike四种类型,这些车以不同的车速匀速行驶,数据流的格式为< tm, rid, eid>,即时间、路段号、车辆标识,每隔10秒记录这些信息,共记录180个时刻的车辆信息。本部分试验都是在Windows XP操作系统上实现的,系统配置为1.5 G内存,AMD 2.0 GHz,开发环境为VC++6.0,开发语言为C++。
试验采用FM_PCSA算法对移动车辆进行草图化,每个桶中采用的草图数目不一样,草图张数是通过文献[12]中的合适草图的方法解决。查询范围依据文献[13]中的 r_r=3, t_t=5,也就是说查询空间范围为3×3个路段,时间范围跨度为5个时刻。DS将784个路段划分为28×28栅格,而DSD+划分为28×28×2栅格,首先不考虑路段上车辆信息的方向属性。
3.1.1 DSD+和DS索引查询时间比较
作为一个服从正态分布的随机变量 ρ=1 /(
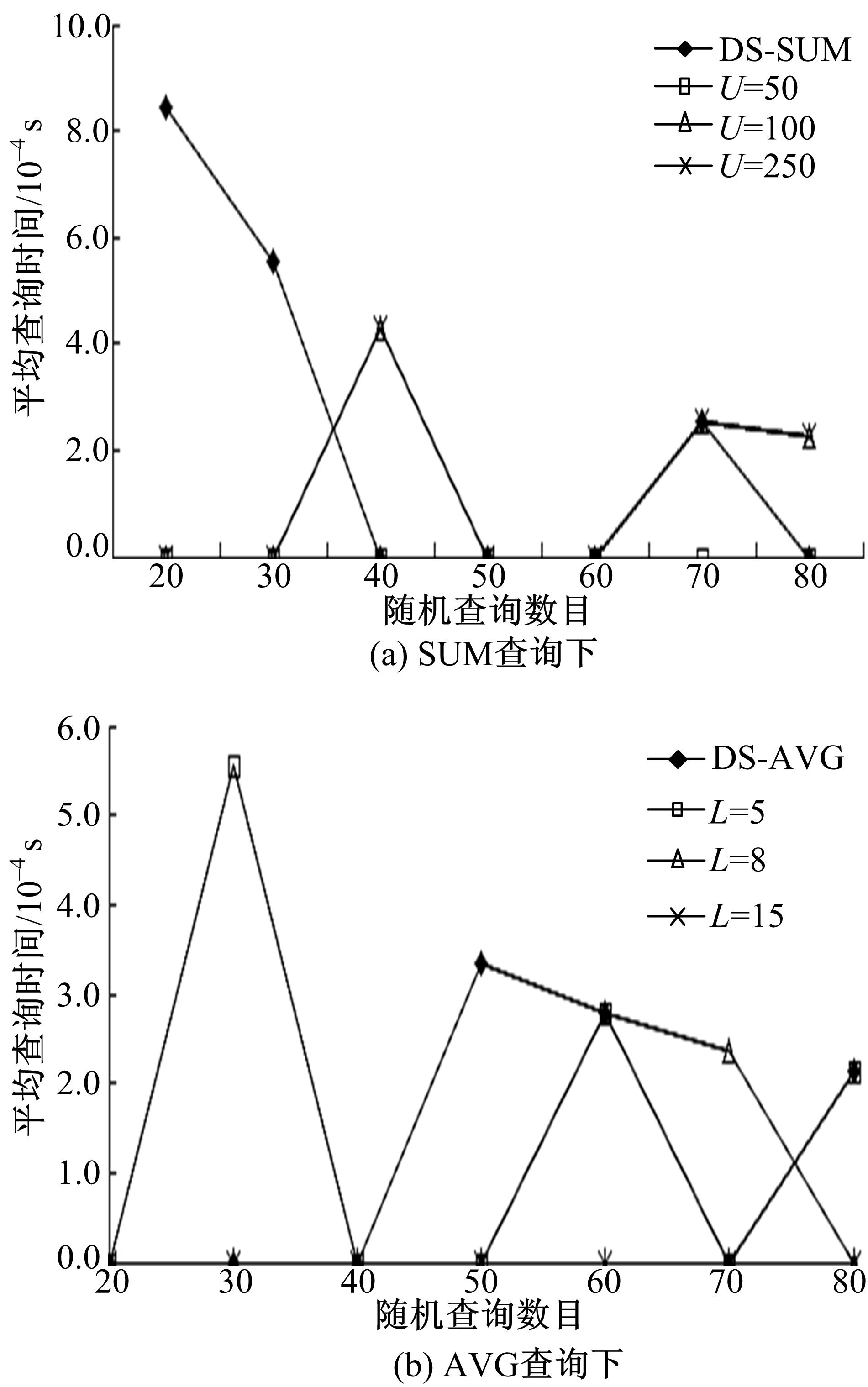 | 图4 DS和DSD+不同设置时查询时间比较Fig.4 Query time comparison between DS and DSD+ while different set |
图4比较了DS和DSD+分别以 sum( qT, qR)和 avg( qT, qR)查询下桶的约束条件为case1: vb≤(
从 图4中可以看出:DSD+和DS结构在时间方面有一样的优势,都不到1 ms,大多数情况下几乎为0,近似查询的速度很快。
3.1.2 随机产生查询的平均相对误差分析
图5针对sum( qT, qR)与avg( qT, qR)两种查询的桶约束条件,比较了DS与DS+以10为步长随机生成20~80个查询的平均相对误差。
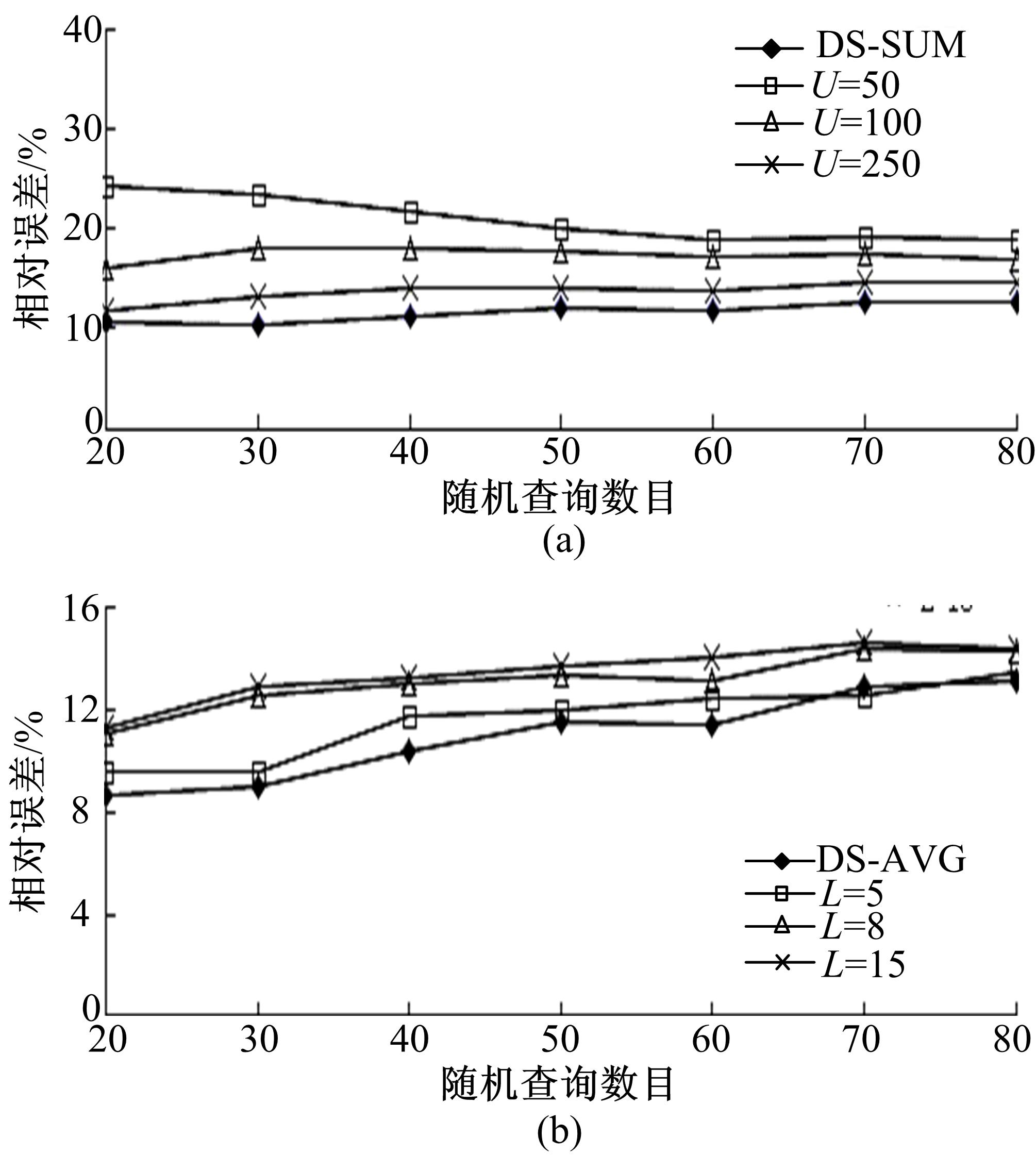 | 图5 DS和DSD+随机产生查询的平均相对误差比较Fig.5 Average relative error comparison between DS and DSD+ while generate queries randomly |
从 图5可以看出:对于DSD+来说,平均相对误差都与 U值成反比,而与 L值成正比, U=50和 U=100时,平均相对误差较大。 L=5时,平均相对误差较小,因此,接下来,试验将DSD+参数设置为 L=5,并与DS比较,从图中可以看出DS的平均相对误差要比DSD+的小,但是相差不大,平均误差都在10%左右。
3.1.3 DSD+和DS索引存储空间分析
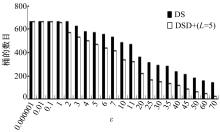
通过上面的分析可知,虽然DS和DSD+两者查询的误差都能保证在一定的范围内,但是DSD+桶的数目要少得多,从桶的约束条件上也是可以看出的,DS中的AMH*对桶的限制较为严格,致使生成的桶的数目过大,而DSD+中AMH+通过参数 L和 U可以调节约束条件,并且保证误差在一定范围内。 图6给出了 ε设置不同值时,DS和DSD+( L=5)各自需要的桶的数目,其中,随机查询数目设置为60,查询区域不变。
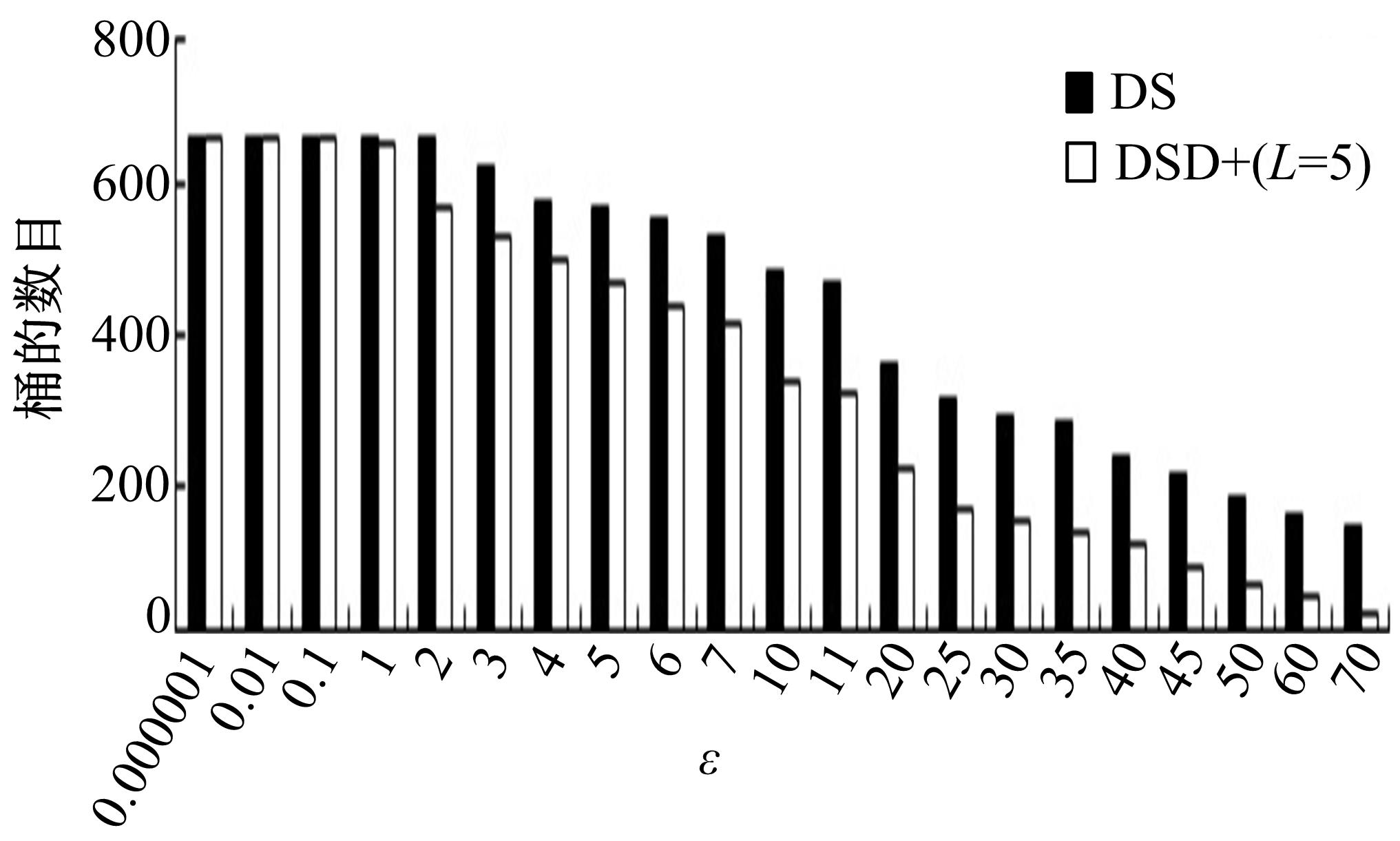 | 图6 ε设置不同值时所需的桶数目Fig.6 Number of barrels required while different ε |
从 图6可以看出: ε越小,需要的桶的数目越多,一般情况下,桶的数目越大,查询的精度越高,但是存储空间越大,而在 ε≥1之后,DSD+所需的桶数目比DS所需的要少得多,而 图5显示两者的精度差不多,换言之,DSD+可以更好地权衡存储空间与查询精度之间的利弊,DSD+所需的桶数目更少,查询精度上也有一定的保证,随着数据量的增大,DSD+在空间存储上的优势将更加明显,且空间存储减少后,查询时间效率上也必将明显优于DS索引。
试验还分析了 ε取值对相对误差的影响,并进行了Sketch生成时间及草图大小的对比,鉴于论文篇幅所限,试验对比结果不一一给出。结合 图6中 ε和桶的数目之间的关系可知,当 ε=5时,不仅精度能有保证,而且桶的数目小得多,从而减少了空间存储及查询时间。同时桶的数目减少了,相应的草图生成时间以及草图的存储空间也减少了。
本部分试验加入方向属性考查DSD+性能。将路段划分为( RES×2) ×RES个栅格,每个路段 rid占据两个栅格,分别对应路段的两个方向,由于总共784个路段,因此试验中 RES取28。以往关于路网数据流聚集查询技术的研究,对于随机产生的60个查询是对每个实际车辆数大于0的路段都加入到平均相对误差计算中,然而实际应用中,用户可能更关心哪些路段拥堵,因此,本文只针对实际车辆数大于5的路段进行试验研究,以考查DSD+的性能。
3.2.1 ε对DSD+查询精度的影响分析
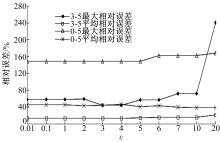
根据 图5,选择精度较好的 L=5的情况进行试验,查询范围首先定为 r_r=3, t_t=5,由于需要支持单个方向车辆数的查询,实验室设置 r_r=0代表的是查询某个路段单一方向的车辆数,若 y坐标是偶数表示 direction=0方向; y为奇数表示的是 direction=1方向,为了使得对单一方向的查询精度更高,在选择恰当的 ε时,不仅考虑 r_r=3, t_t=5的情况,还要考虑 r_r=0, t_t=5时查询的相对误差。 图7是分别针对3-5和0-5两种查询,将 ε从0.01变化至20,观察两种查询的最大相对误差以及平均相对误差。
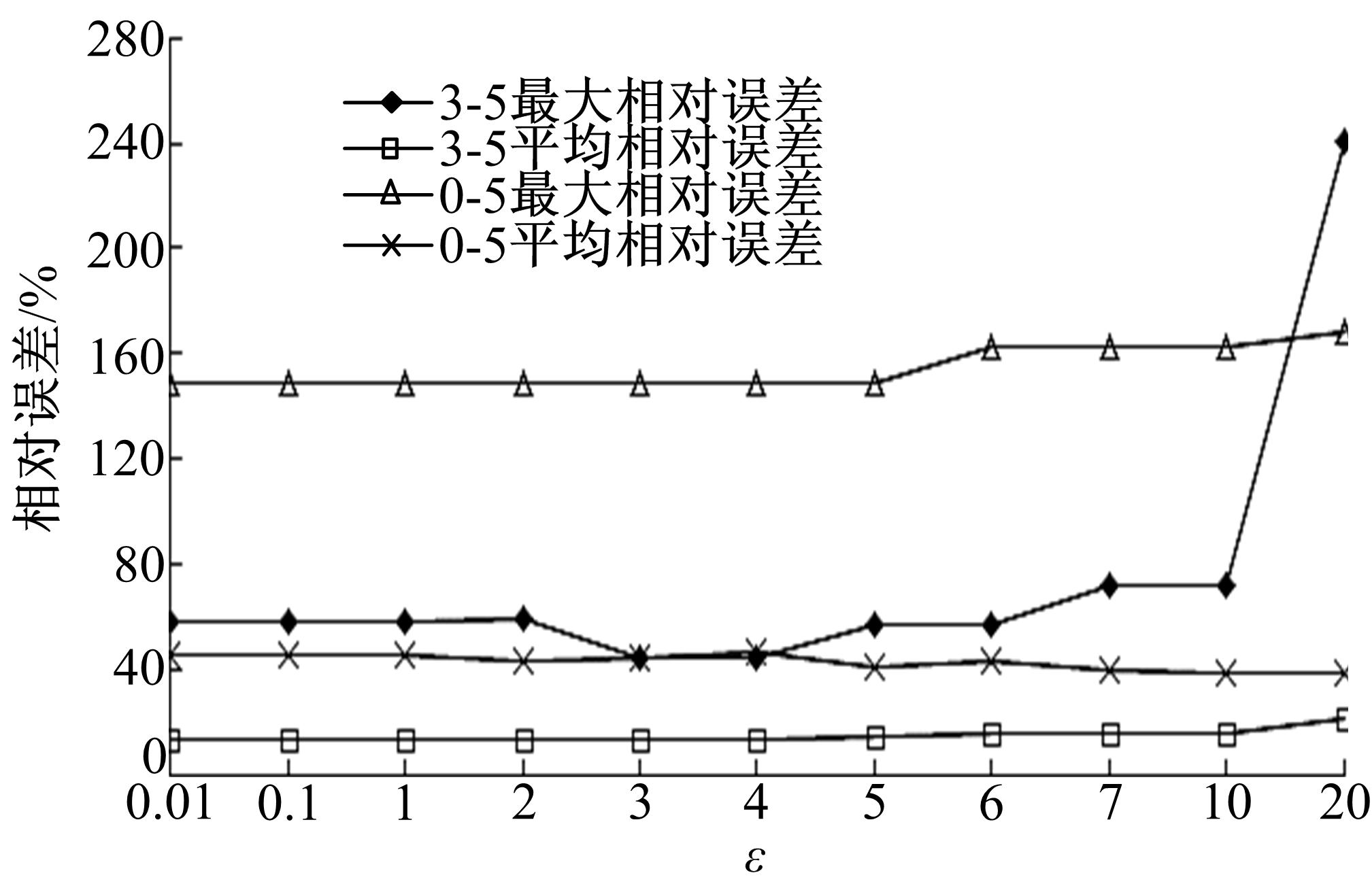 | 图7 ε对DSD+查询精度的影响Fig.7 Effect on the query accuracy of DSD+ about ε |
从 图7可知: ε=3时两种查询的最大相对误差及平均相对误差较小,查询效果较好。
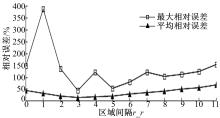
3.2.2 r_r对DSD+查询精度的影响分析
图8描述了选择效果较好的 ε=3, t_t=5, r_r从0变化至11,0代表随机产生的某个路段单个方向上的车辆数,DSD+( L=5)索引查询的最大相对误差及平均相对误差,由于总路段数为28×28×2=1568,也就是说查询范围是从总路段数的1/1568到121/1568,换算成百分比就是总区域的0.0638%到7.7168%。从 图8可以看出:在时间间隔为5(每个时间间隔为10 s)的条件下,区域间隔为3时,查询效果最好;区域间隔大于8时,不管是最大相对误差还是平均相对误差都呈上升趋势,只有区域间隔为3时,误差最小,可见,DSD+索引结构较适用于这一范围内的查询。
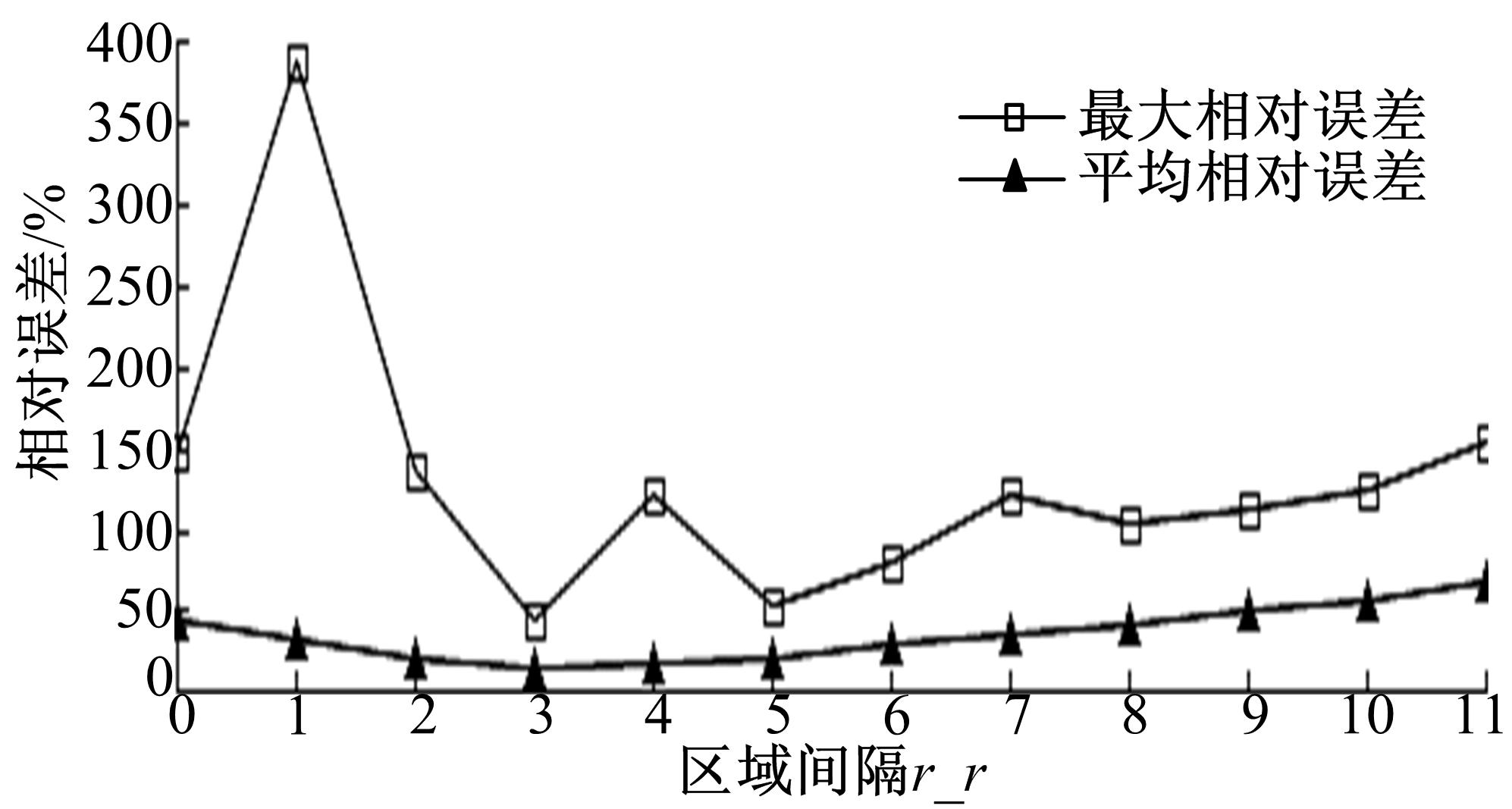 | 图8 不同区域间隔相对误差的比较Fig.8 Relative error comparison while different regional intervals |
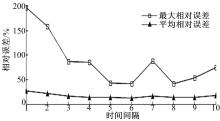
3.2.3 t_t对DSD+查询精度的影响分析
图9描述了区域范围固定为3,也就是查询覆盖范围为9个路段, ε和 L的值与前面保持一致,时间间隔 t_t从1变化到10,DSD+( L=5)索引查询的最大及平均相对误差。
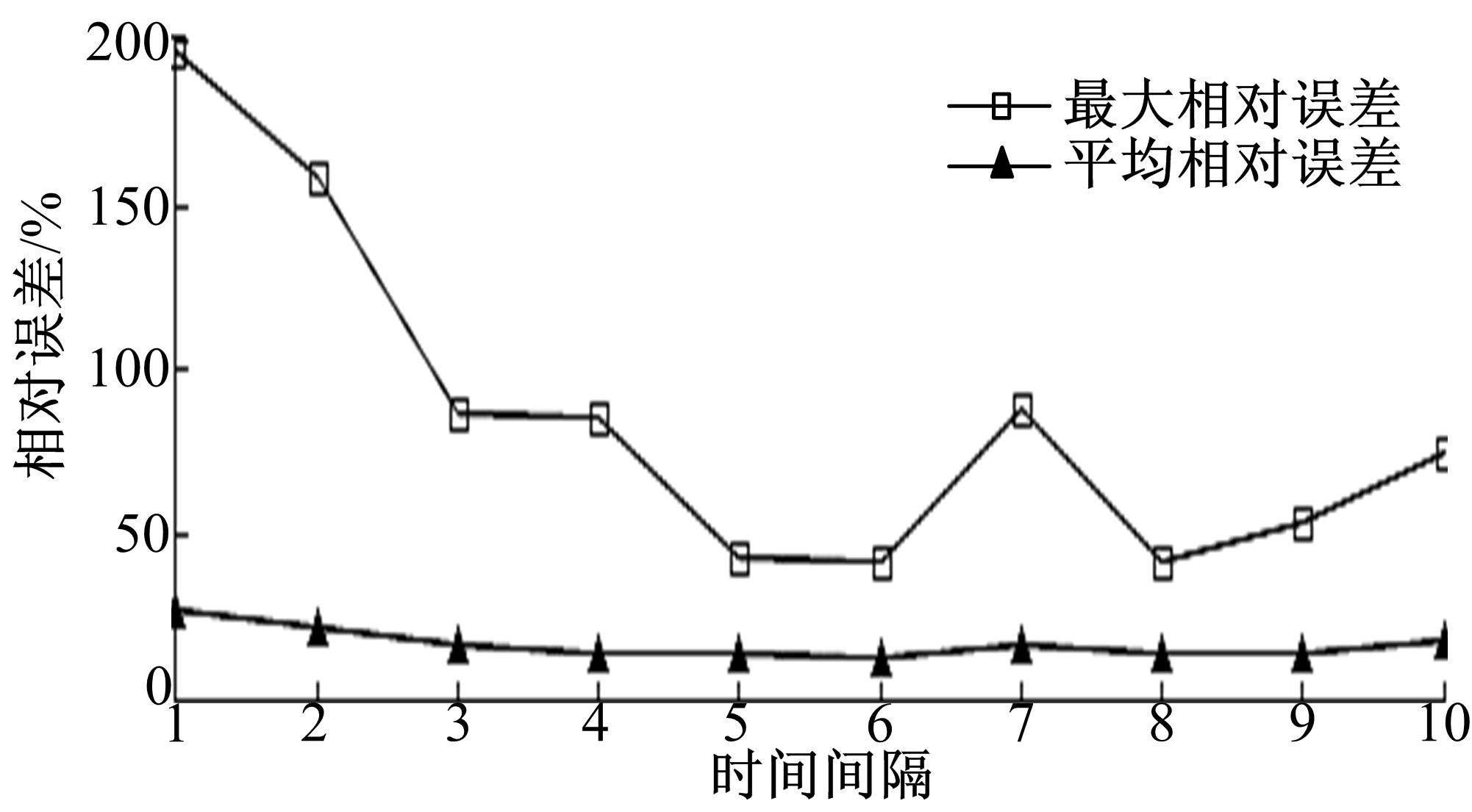 | 图9 不同时间间隔相对误差的比较Fig.9 Relative error comparison while different time intervals |
从 图9可以看出:查询时间间隔为1~3时,最大相对误差都较大,时间间隔较长的相对误差都较小,这也比较符合现实生活中,较长时间的车辆流动信息更能真实反映查询区域的交通状况,本试验中,间隔时间为5和6时,平均相对误差和最大相对误差都最小。
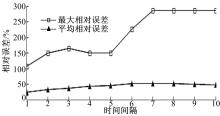
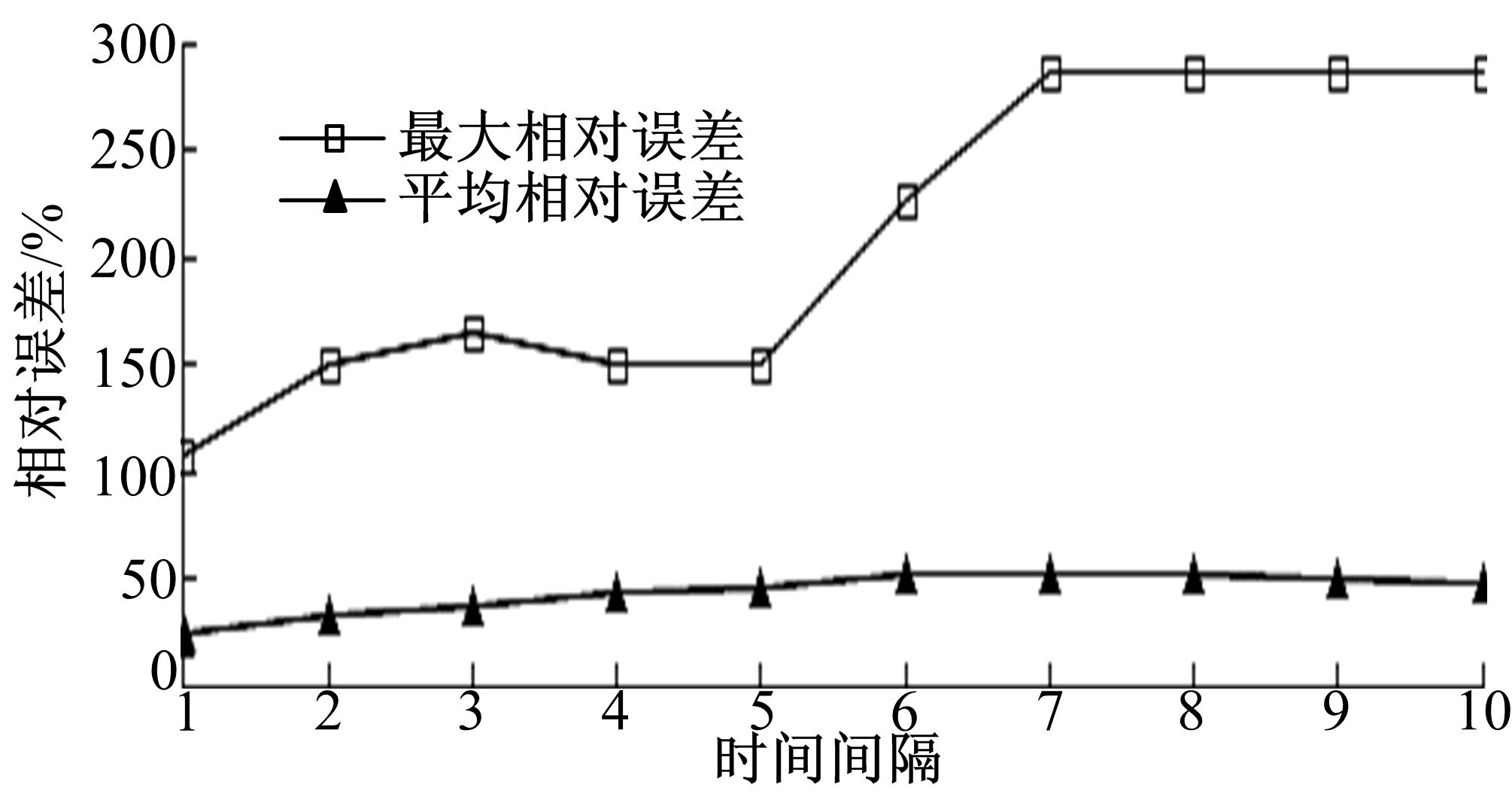
3.2.4 DSD+单向聚集查询性能分析DSD+借鉴了aCN-RB-tree的双向聚集属性,因此本文将对单向聚集查询性能进行分析。 图10为 ε=3, L=5, r_r=0, r=0 .95(即 h( r) =1 .96),时间间隔 t_t从1变化到10时,DSD+对单一方向车辆数的聚集查询相对误差。
 | 图10 不同时间间隔路段单个方向查询相对误差Fig.10 Single direction of road segment query relative error while different time intervals |
从 图10可以看出:时间间隔为1~5时的DSD+的最大相对误差及平均相对误差要较小,而时间间隔为1~10时的平均相对误差都在50%左右,时间间隔为1时的平均相对误差最小为23.842698%。而由 图8可知:区域间隔为3时,平均相对误差的最小值为13.244223%,单一路段车辆数较少,在较短时间间隔内误差较小,而随着时间变长,误差逐渐增加,直到一定时刻保持平稳。而 r_r=3时,包含9个路段,18个栅格,车的数量较多,近似查询精度较高。虽然DSD+对于单一方向的近似查询精度没有跨越多个区域的查询精度高,但是它在近似聚集技术中考虑了方向属性的查询,更符合实际中路段的双向性。
采用AMH+技术智能划分结合Sketch技术的支持方向属性聚集特性的aCN-RB-tree,提出了DSD+索引结构,并将其应用于路网上的移动对象聚集查询。试验结果表明:该方法在保证查询时间、平均相对误差的前提下,可以更好地权衡存储空间与查询精度之间的利弊,同时考虑了实际路段的双向性。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|