
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于I-RELIEF和SVM的畸形马铃薯在线分选
[张保华1, 2  , 黄文倩
, 黄文倩2 , 李江波2 , 赵春江1, 2 , 刘成良1 , 黄丹枫1 ]
, 黄文倩, 刘成良|
|


作者简介:张保华(1986-),男,博士研究生.研究方向:基于机器视觉与模式识别的农产品无损检测.E-mail:zhangbaohua@sjtu.edu.cn
在提取的RGB图像的R分量图像上提取二值图像和边界图像,计算马铃薯图像的偏心度、矩形度、圆形度以及边界图像的10个傅立叶描述子等共计13个形状特征。其次把样本的形状特征输入到I-RELIEF模块中,求出各个形状特征在分类中的影响程度,即各自权值。然后把带权值的样本形状特征输入到支持向量机算法模块中进行训练,从而得到分类器。最后用分类器实现畸形马铃薯的在线分选。试验结果表明:该方法每秒钟可以检测4个马铃薯,可以满足分选设备的实时性要求,并且畸形马铃薯的识别率高达98.1%。
, HUANG Wen-qian, LIU Cheng-liangAn online sorting method of irregular potatoes is proposed. First, the R-component image is extract, and then the binary image and boundary image are obtained by thresholding method. Second, thirteen essential geometrical features, such as eccentricity, rectangle degree and roundness, and ten Fourier descriptors are extracted. Third, the geometrical features of the potato image sample are feed into the module of I-RELIEF algorithm, which exports a weight for each feature. Fourth, the features of the potato image sample with weights are feed into the training module of Support Vector Machine (SVM). Finally, the classifier model is used to make decision and achieve the grading result online based on the potato's features and weights. Results show that the SVM method can detect and sort four potatoes per second with the help of I-RELIEF module, and the overall accuracy is 98.1%.
机器视觉技术是一种客观、快速、经济的检测技术[ 1, 2],将其应用于农产品品质检测具有巨大的潜在价值[ 3, 4, 5, 6, 7, 8, 9]。马铃薯在形状和尺寸上波动范围较大,这使得马铃薯的检测和分选变得困难。在市场交易时,具有规则外形的马铃薯深受消费者喜爱,不规则的畸形马铃薯因外观怪异、食用时不便于削皮且有较大浪费等原因则遭到冷落。因此交易前利用机器视觉技术对具有不同外观形状的马铃薯进行分选是必要的。
Heinemann等[ 7]利用边界提取算法提取马铃薯的边界图像,通过提取边界图像的傅立叶描述子作为形状特征,然后根据形状和尺寸对马铃薯进行分选。Zhou等[ 10]开发了一个针对马铃薯质量、形状、切面直径、颜色等特征进行马铃薯分选的计算机视觉系统,分选准确率在85%以上。Navid等[ 11]提出了基于机器视觉的马铃薯外部缺陷和形状的在线检测方法,形状特征选取了外接矩形长宽比、最大直径和最小直径3个特征,融合马铃薯的缺陷特征对马铃薯进行在线分选,结果证明支持向量机的方法在准确率和效率上具有较好的表现,分选准确率在95%以上。Gamal等[ 12]提出了一种基于机器视觉的马铃薯形状实时检测方法,该方法提取了离心率、偏心度、圆形度、伸长量4个基于傅立叶的相关参数,对马铃薯进行在线分选,总分选精度为96%。内蒙古农业大学郝敏等[ 13]提取马铃薯的Zernike矩作为特征参数并利用支持向量机实现了马铃薯外形的分类。在对马铃薯形状进行分类时,现有技术大多没有考虑各个形状特征对分类的影响程度,相关性较小的特征不仅对分类准确率没有太多贡献,而且还浪费了特征提取所需的时间,不利于马铃薯快速在线分选。
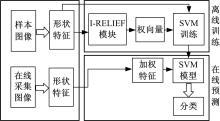
为了满足马铃薯分选的实时性要求,本文在离线训练阶段,初步选用了马铃薯的偏心度、矩形度、圆形度和边界图像的10个傅立叶描述子作为马铃薯的形状特征,然后基于I-RELIEF算法对所选特征进行权值计算,剔除相关性较小的特征,同时记录所选形状特征的权值向量,最后把形状特征和权值向量一并送入支持向量机进行训练,生成马铃薯形状分类器。在在线检测阶段,在线提取马铃薯的形状特征,并加权处理,利用离线生成的分类器依据形状完成马铃薯的分选。
试验用马铃薯样本购买于北京当地菜市场,共计282个,通过后期筛选,选择其中260个作为试验样本,样本分为正常马铃薯和畸形马铃薯,其中正常马铃薯共有170个,畸形马铃薯共有90个。正常马铃薯一般呈现类圆形或者椭圆形,畸形马铃薯多呈现马铃薯块茎含有畸形凸起、不规则歪曲,或由于马铃薯块茎二次发育造成主块茎附带一个或多个小块茎[ 14, 15]。
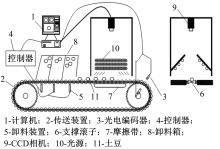
马铃薯自动分选系统如 图1所示,主要包括上料装置、传输装置、控制装置、计算机视觉检测系统、卸料装置等部分。
 | 图1 马铃薯自动分选系统示意图Fig.1 Diagram of general scheme |
系统的工作流程为:系统上料,马铃薯单列置于托盘上随传送链条传动。光电编码器检测到马铃薯,信号传输至计算机并控制相机采集马铃薯图像,经过畸形马铃薯检测软件,对马铃薯的外观进行检测、分类。控制系统控制卸料装置卸料,完成马铃薯的分选。
首先,通过摄像机获取马铃薯的RGB图像,分离得到R通道图像,随后,采用亮度校正算法对R通道图像进行亮度校正,校正算法如下:
式中: Max、 Min为R通道图像中的最大、最小灰度值; Input为R通道图像的像素灰度值; Output为变换后对应坐标点的像素灰度值。
在获取亮度校正图像后,首先对图像采用3×3圆盘形结构元素进行高斯滤波,然后使用自适应阈值完成马铃薯图像的分割。为了消除二值图像中存在的小区域噪声和马铃薯瓜蒂部位的细线状噪声,采用区域填充算法和形态学开运算对二值图像进行操作。然后,对马铃薯二值图像进行分析,提取马铃薯的偏心率、矩形度、圆形度和10个傅立叶描述子等形状特征。最后,将所选特征和其权值向量一并送入支持向量机模型进行形状分类。
在马铃薯形状分类过程中,每一个形状特征对马铃薯形状类别识别的作用程度并不相同,一些相关性较小的形状特征的参与,不利于马铃薯形状的快速准确检测。因此本文在训练分类器之前,运用了I-RELIEF算法对初步选择的形状特征进行权值计算,然后剔除相关性较小的特征,并记录所选用特征的权值向量,在离线训练阶段和在线预测阶段,马铃薯的形状特征向量和权值向量一并送入分类器进行分类。 图2为本文分类器设计的流程图。
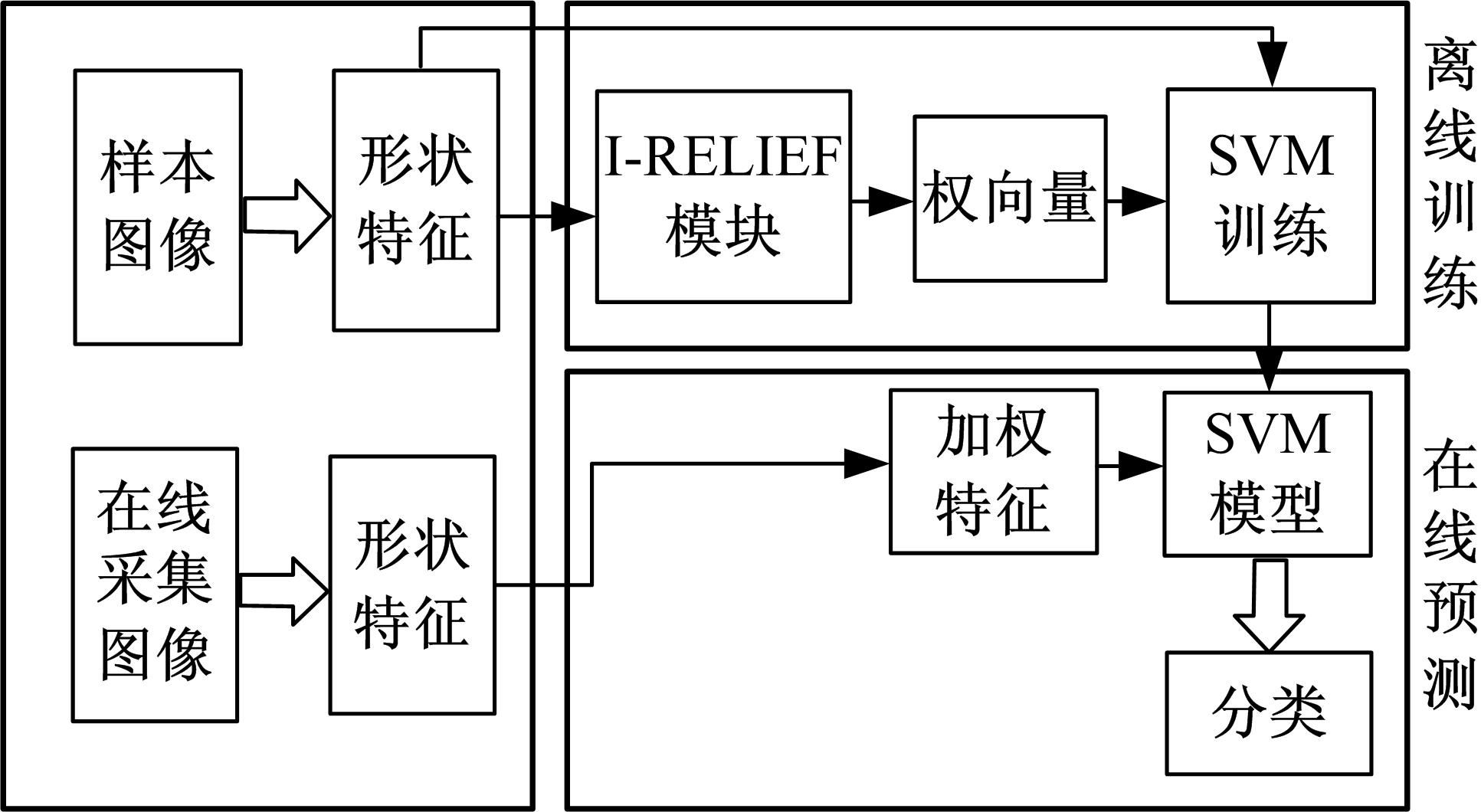 | 图2 分类器设计流程图Fig.2 Flowchart of the training and predicting classifier |
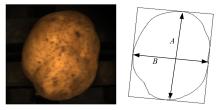
(1)偏心率。偏心率也称为伸长度,在一定程度上反映了区域的紧凑性。物体的偏心率定义为最小外接矩形的主轴意义下的长宽比,公式为:
式中: A为马铃薯区域最小外接矩形主轴长度; B为马铃薯区域最小外接矩形辅轴长度。
马铃薯的最小外接矩形以及其主轴和辅轴如 图3所示。
 | 图3 主轴和辅轴Fig.3 Main and auxiliary axis |
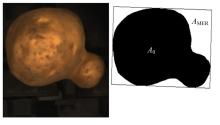
(2)矩形度。矩形度定义为图像中马铃薯的面积和其最小外接矩形面积的比值,矩形度体现了马铃薯对其最小外接矩形的充满程度,因此矩形度大于0小于1,其计算公式为:
式中: AO表示马铃薯的像素面积; AMER表示马铃薯最小外接矩形的面积。
马铃薯的面积以及马铃薯最小外接矩形面积如 图4所示。
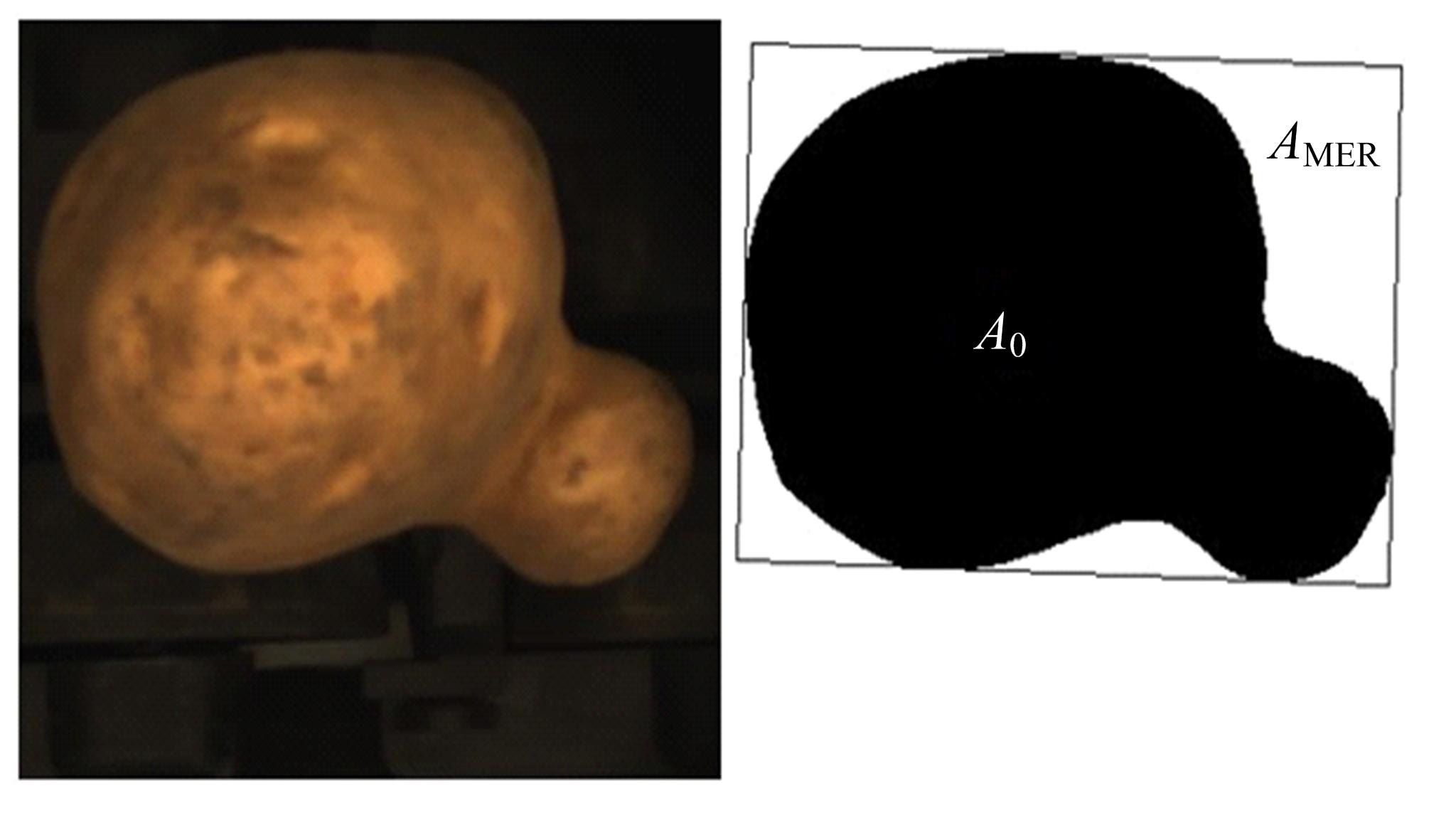 | 图4 矩形度求取方法Fig.4 Area of potato and it’s minimum enclosing rectangle |
正常的马铃薯对其最小外接矩形的充满程度较大,因此矩形度较大;而畸形马铃薯对其最小外接矩形的充满程度较小,因此矩形度较小。所以把矩形度作为一个衡量马铃薯形状的特征纳入特征集。
(3)圆形度。圆形度是一个用来刻画物体边界复杂程度的量。其计算公式为:
式中: L表示马铃薯二值图像的周长,其中,4连通中相邻像素距离为1,而8连通中斜对角相邻像素距离为
接近圆形的马铃薯的外形比较简单,圆形度较大;畸形马铃薯外形复杂,圆形度较小。因此圆形度在一定程度上反映了马铃薯的外形特征,被纳入马铃薯形状的特征集。
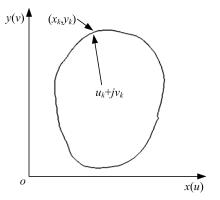
(4)傅立叶描述子。在图像中,物体的边界是一个难以定量描述的二维离散曲线段,对边界曲线段作离散傅立叶变换,是定量描述边界形状的一种常用方式。傅立叶变换可以将 x-y平面中的二维曲线段转换成复平面上的一个序列,对该序列进行一维的离散傅立叶变换,从而得到一系列的傅立叶系数,这个系数便是边界的傅立叶描述子。在现实中,直接把空间平面和复平面重合,空间平面上的点和其在复平面上的点一一对应,这样就完成了从空域到频域的坐标转化。坐标转换关系如 图5所示,其中横坐标表示空间 x轴或复平面 u轴,纵坐标表示空间 y轴或复平面 v轴;( xk, yk)代表边界上任一点, uk+jvk表示复平面中与其对应的点。
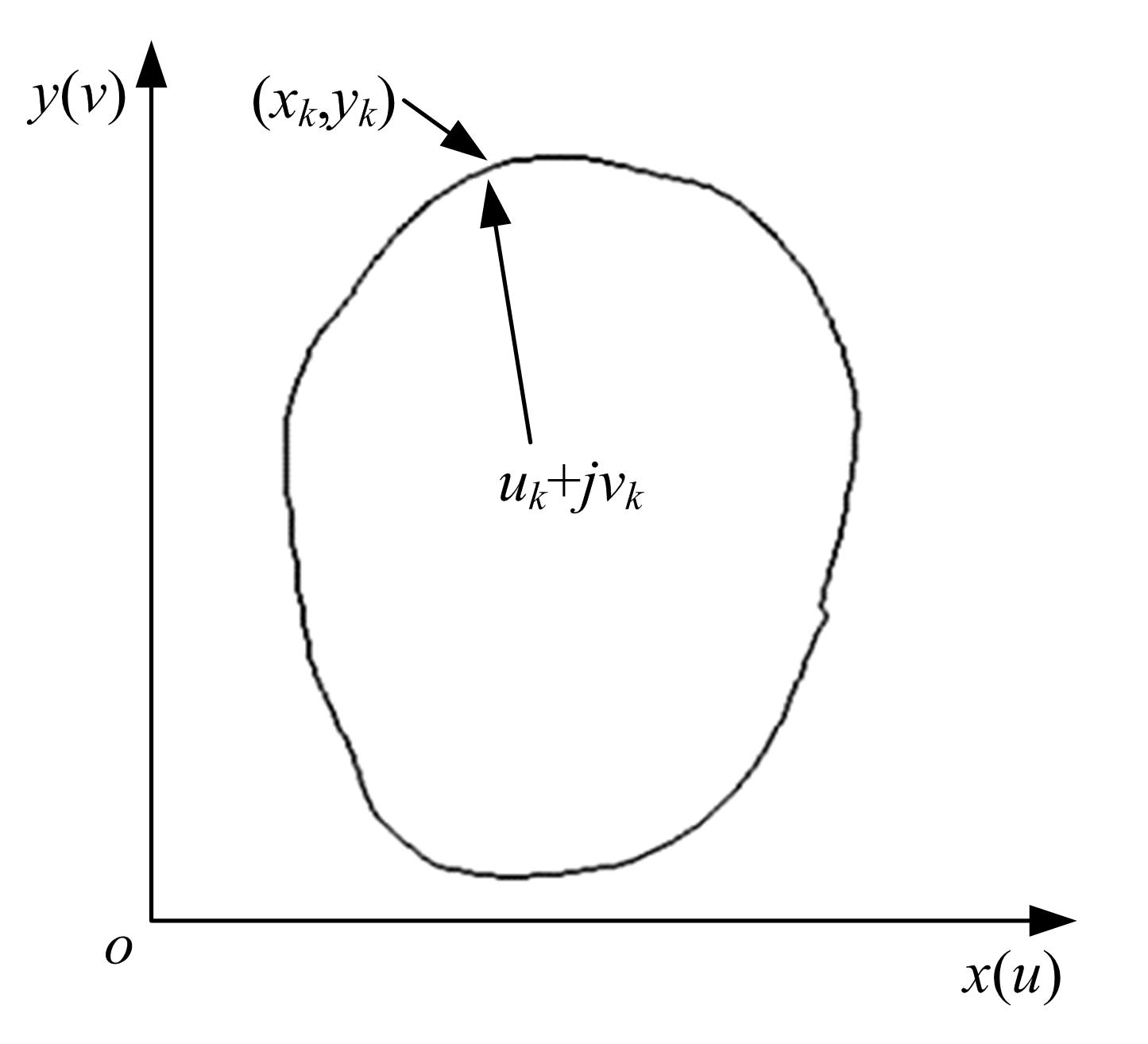 | 图5 空间域和频域坐标转换关系Fig.5 Conversion between space domain and frequency domain coordinates |
假设一个封闭的边界曲线段由 N点组成,其傅立叶描述子可以通过如下方法求取:
(1)将 x-y平面和复平面 u-v坐标系重合,则构成边界的点的坐标在空域和频域一一对应,从任一点绕边界一周,得到边界的复数序列:
(2)对序列 s( k)作离散傅立叶变换,得到边界的傅立叶描述:
(3)对傅立叶描述进行逆变换:
(4)傅立叶变换的低频成分是对边界形状的描述,因此取前 M个系数即可以得到一个近似的表示:
傅立叶变换系数的模具有平移和旋转不变的特性,因此可用傅立叶变换的系数向量作为物体形状的定量描述。在实际运用中,通常将其幅值归一化,如除以其平均幅值或最大幅值,可以得到与尺度无关的形状特征。本文把傅立叶描述子的前10个变换系数作为描述马铃薯形状的特征集。
本文选择了13个描述马铃薯外形的特征,把这些对分类器发挥的作用相差较大的特征一视同仁地作为支持向量机的输入是不合理的。在特征选择算法中,RELIEF是一种简单有效的方法,然而RELIEF算法对于调和参数选择非常敏感,鲁棒性较差。Sun等[ 16]为了克服上述缺点并且降低分类算法的时间消耗,对RELIEF方法进行了改进,提出了I-RELIEF算法,本文运用了该算法对马铃薯形状特征进行加权处理。
(1)I-RELIEF算法的概念:
Hit集: Hn={ i:1≤ i≤ N, li=ln, i≠ n},此集合为样本集中与样本 xn属于相同类别的样本序号集。
Miss集: Hn={ i:1≤ i≤ N, li≠ ln},此集合为样本集中与样本 xn属于不同类别的样本序号集。
(2)RELIEF算法的目标函数为:
I-RELIEF算法就是为了优化目标函数(见式(9))而提出来的改进方法,经过优化计算,I-RELIEF算法获得权向量 w。其中, Sn1为Miss集中与样本 xn距离最近的样本序号; Sn2为Hit集中与样本 xn距离最近的样本序号;‖ x‖ w=
样本 xi是样本集 xn中最接近Miss样本的概率为:
样本 xi是样本集 xn中最接近Hit样本的概率为:
样本属于异常样本的概率为:
式中: f(·)为各式的核函数。
(3)I-RELIEF算法的实现方法:
为了优化目标函数 C( w),需要如下计算迭代式:
式中:
式(13)中的 Q( w
对于第 t+1次迭代, w可由下式求出:
式中: w={ w:‖ w
重复迭代式(14)和式(15),直至满足:
式中: θ表示迭代终止条件。
通过以上算法可以得到特征集的权重系数向量 w,权重系数的大小反映了相关特征对马铃薯形状类别归属的作用程度,因此权重系数过小则可以作为无关特征予以去除。将训练集数据输入I-RELIEF算法模块中进行计算,将得出的权重系数向量作为支持向量机输入特征的权重向量,对在线马铃薯的形状进行分类。
支持向量机是由Corinna Cortes和Vapuik在1995年首次提出来的[ 17]。该方法建立在统计学习理论的VC维理论和结构风险最小原理基础上,根据有限的样本信息在模型的复杂性和学习能力之间寻求最佳折衷,以期获得最好的推广能力。本文采用支持向量机作为分类器,选择径向基作为核函数,惩罚因子 C=10.0,核函数参数 γ=8.0。
本文把马铃薯分为畸形马铃薯和正常马铃薯两类,两种类别的马铃薯样本是由一位具有丰富经验的专业分选工人挑选的,且在样本选择上,尽量使样本覆盖几乎所有可能的马铃薯大小和形状级别。每类马铃薯分别选取50个作为训练样本,离线训练和在线预测阶段的马铃薯图像都是在分类生产线上在线获取的,每秒钟采集4幅,为了更加准确、全面地反映马铃薯的真实形态,本文在训练阶段对样本连续采集3次。
在离线训练阶段,获得图像后,首先对图像进行预处理、二值分割、边界跟踪;然后提取了马铃薯的偏心率、矩形度、圆形度和10个傅立叶描述子系数共计13个特征作为马铃薯的形状特征。图像处理过程如 图6所示。
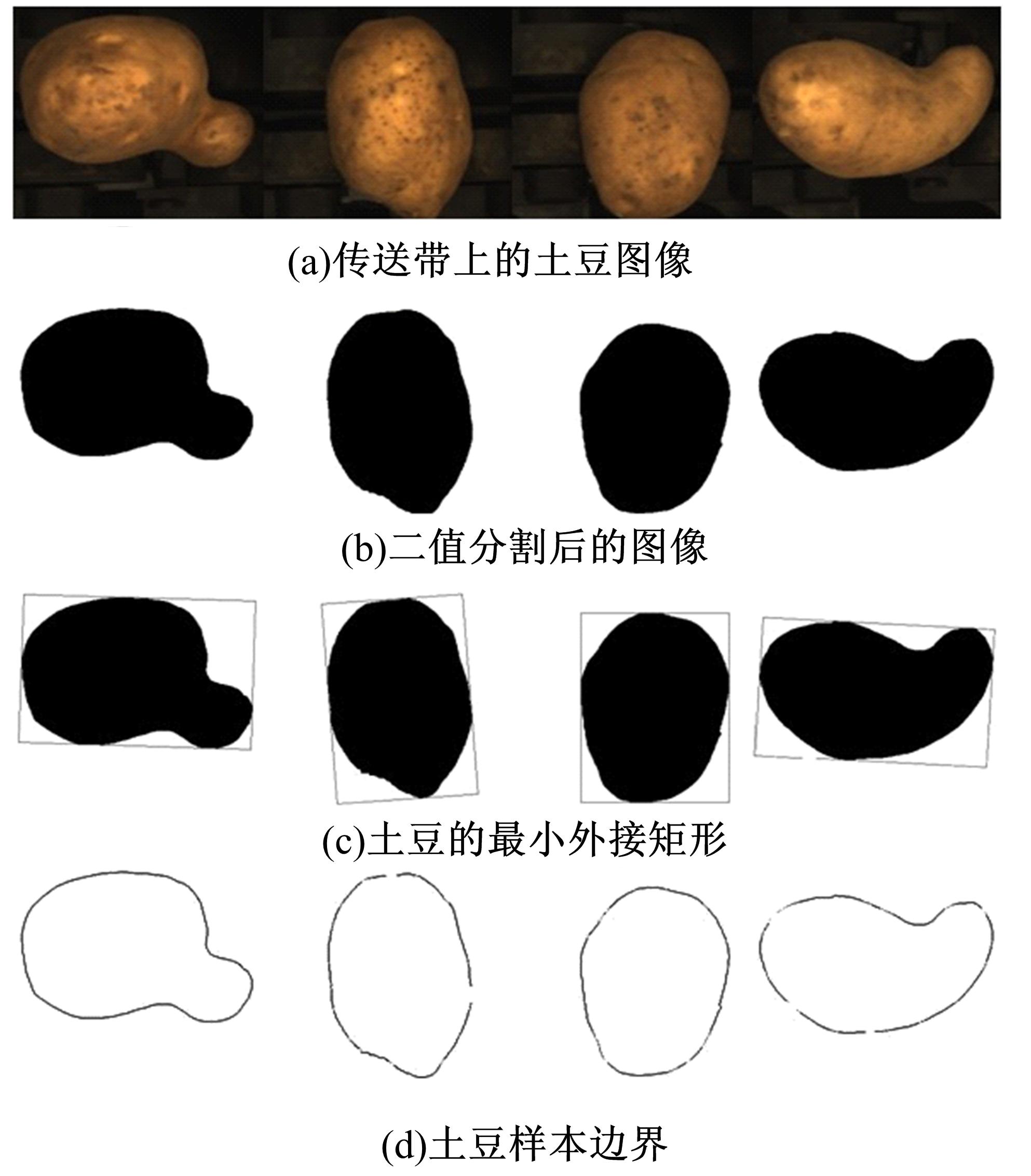 | 图6 马铃薯图像处理过程Fig.6 Steps of the processing of images |
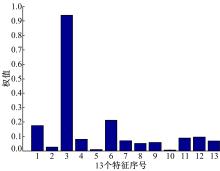
把这些样本以及样本类别标号输入到I-RELIEF算法模块中,计算出各个特征量的权值,在在线预测时,由这些权值构成权值向量,与特征向量一起送入支持向量机中进行分类预测。经过I-RELIEF算法的计算,各个特征的权值如 图7所示, 图7中,1~13分别代表偏心率、矩形度、圆形度及傅里叶描述子的前10个系数。
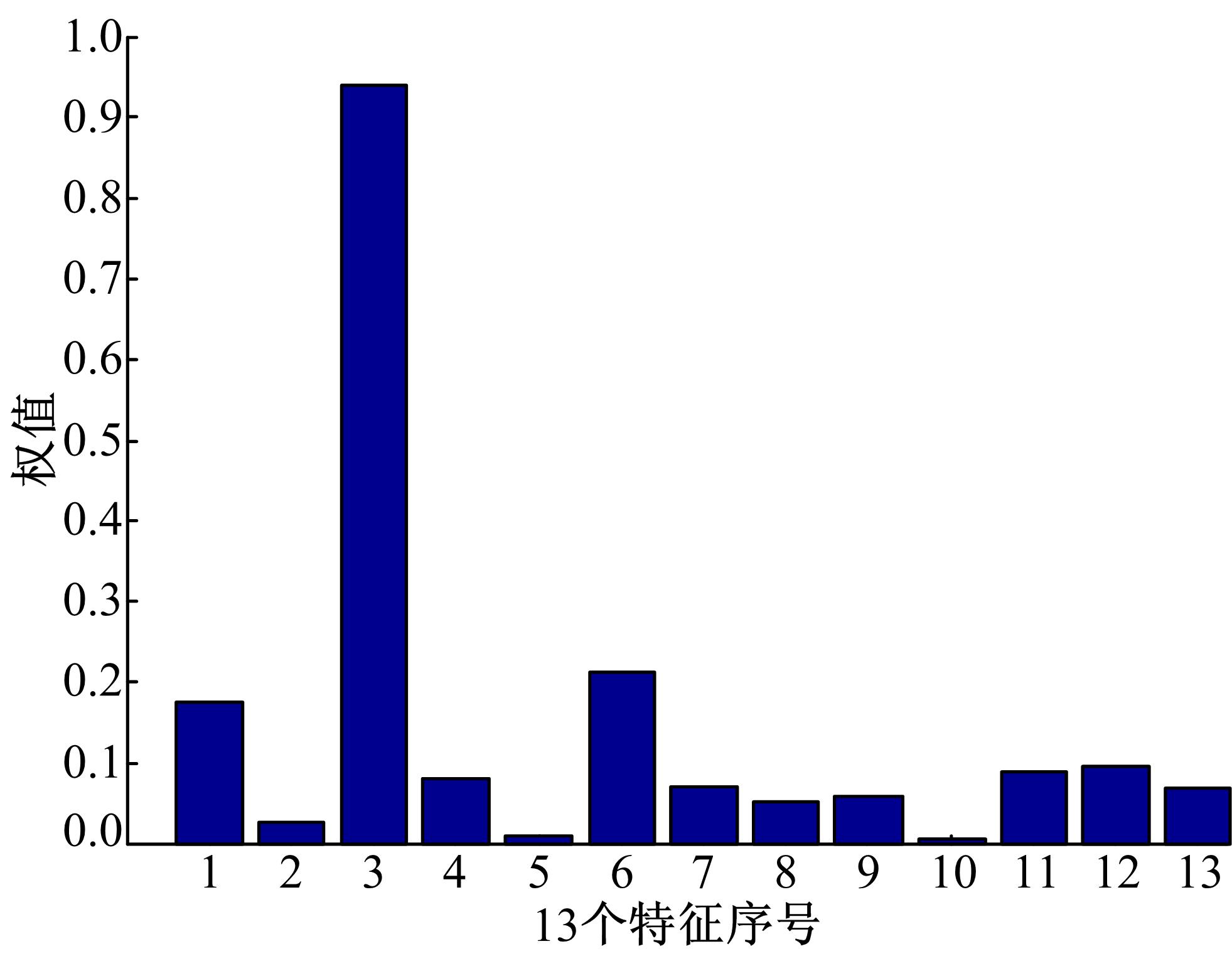 | 图7 马铃薯形状特征权值Fig.7 Weights of the features |
从 图7可以看出:偏心率、圆形度、傅立叶描述子的第3个系数在分类中发挥的作用较大;而矩形度、傅立叶描述子第2个系数、第7个系数在分类时发挥的作用小,因此剔除马铃薯形状的这3个特征,把剩余权值组成权值向量,与其相对应的特征一起送入支持向量机分类器,然后得出分类器模型。
在线预测阶段,首先载入已经训练好的分类器模型;其次根据光电编码器的触发信号,抓取传送滚子上的马铃薯图像,对图像预处理、二值化、边界跟踪;然后提取马铃薯图像的偏心率、圆形度和10个傅立叶描述子特征;最后利用分类器对马铃薯的形状进行分类。
对120个正常马铃薯和40个畸形马铃薯进行在线预测,为了使预测数据更具合理性和可靠性,本文对正常马铃薯和畸形马铃薯进行混合试验,通过上料机构随机进行检测,且重复进行3次独立试验,综合分析计算了检测正确率。分选结果如 表1所示。正常马铃薯有6个被识别为畸形马铃薯,准确率达到98.3%。被误识别的马铃薯有2个是因为马铃薯细长,且侧面图像被采集,另外有1个出现过分割的问题,有3个是因为马铃薯被擦破表皮所致。畸形马铃薯有3个被误识别为正常马铃薯,准确率为97.5%。被误识别的马铃薯是因为在传送过程中,马铃薯旋转,采集的图像为其侧面,因而畸形没有被检测出来。虽然本文多次采集马铃薯的图像,但是每次都是独立进行检测的,为了提高精度,在以后的研究中需要设计更加合理的采集系统,例如可以使用多个相机系统采集不同方位的马铃薯的图像,多图像融合对马铃薯形状做出判断。
| 表1 试验结果 Table 1 Results of the experiment |
开发了一种基于I-RELIEF和SVM的畸形马铃薯在线检测识别算法。该算法首先提取马铃薯图像的偏心率、矩形度、圆形度和10个傅立叶描述子共计13个特征。然后把这13个形状特征输入I-RELIEF算法模块,求出各个特征的权值。计算结果表明:偏心率、圆形度以及傅立叶描述子的第3个系数在分类中发挥的作用较大,而矩形度、傅立叶描述子第2个系数、第7个系数在分类时发挥的作用小,剔除这3个作用较小的特征;最后把所剩余的10个形状特征和其权值一起送入SVM算法中进行训练,得到马铃薯形状分类器。在马铃薯的在线分选阶段便可以载入分类器对马铃薯进行分选。试验结果表明,该算法每秒钟可以检测4个马铃薯,满足在线检测的实时性要求,并且畸形马铃薯的识别率达到98.1%。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|