基于Sigma点
 , 冯新喜
, 冯新喜Quasi-Monte Carlo particle filter algorithm based on sigma point
KONG Yun-bo1 , FENG Xin-xi1 , LU Chuan-guo1 , LIU Zhen-tao2
, FENG Xin-xiFig.4 Trace of target and sensor
基于Sigma点 |
|
孔云波, 冯新喜 |
Quasi-Monte Carlo particle filter algorithm based on sigma point |
|
KONG Yun-bo
, FENG Xin-xi |
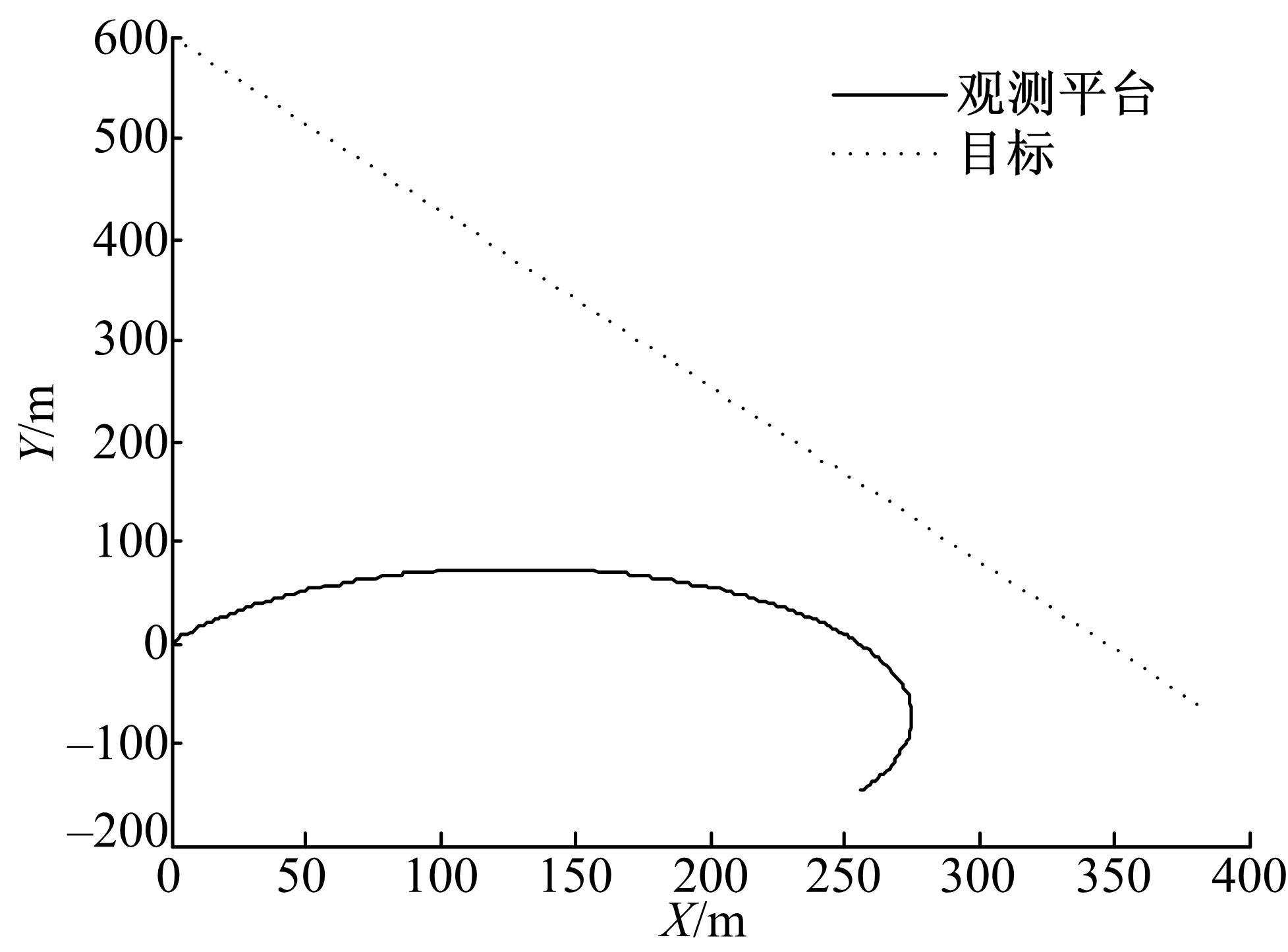
| 图4 目标和传感器的运动轨迹 Fig.4 Trace of target and sensor |
| |