





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
多通道井-地电位梯度采集系统的设计与实现
[贾正森1, 2  , 林君
, 林君1, 2 , 朱凯光1, 2 , 王佳1, 2 , 李雪涛1, 2 ]
, 林君, 朱凯光|
|


作者简介:贾正森(1986-),男,博士研究生.研究方向:井-地电法及仪器.E-mail:zhengsen.jia@hotmail.com
根据垂直有限线源三维异常电位有限差分展开理论计算,验证了电位梯度法在探测水驱驱油异常方向的有效性,设计并研制了基于虚拟仪器技术的低噪声、高分辨率油田井-地电位梯度采集系统。该系统采用差分输入方式,短路噪声幅度低于-130 dB,A/D采集使用了扩展插槽设计思想,从而达到多通道数据的同步采集。运用Matlab和Labview混合编程技术,实现了微弱信号的提取和探测结果的实时成像。对比、重复实验结果表明,电位梯度采集系统具有更高的分辨率及良好的稳定性,通过对大庆油田注水井实验数据的处理、分析,确定了水驱的方向,用注水井资料验证后,证实了该方法的有效性和系统在水驱驱油方向探测上的准确性。
Theoretical calculations are carried out based on a vertical line source 3D abnormal potential of finite difference to verify the effectiveness of potential gradient in the detection of water injection direction. Then, a low-noise, high-resolution oil borehole-surface potential gradient detection system is designed and developed based on virtual instrument technology. The system applies a differential input. The short circuit noise amplitude is lower than -130 dB. The A/D acquisition, which adopts the expansion slot design ideas, realizes the synchronization of multi-channel data acquisition. The upper layer software consists of Matlab and Labview programming techniques, thus the extraction of weak signals and real-time imaging of detection results can be achieved. Experiments show that the potential gradient detection system has higher resolution and good stability compared to the potential detection system. By processing and analyzing the experimental data obtained from the injection wells in Daqing oilfield, it can locate the cutting-edge of water drive. Furthermore, the injection well data prove the accuracy and effectiveness of the system in detecting the water injection direction.
剩余油是石油开采过程中一个巨大的潜在资源[1]。目前, 水驱驱油是提高油田采油率的主要手段之一, 研制高分辨率采集系统, 更加准确探测水驱驱油方向是十分必要和重要的。
由于井-地电法水驱驱油监测具有经济有效、操作简便等特点, 在国内外被广泛应用。1988年, 美国尤他大学的Marquis等[2]采用井-地电法在Elda垃圾场地开展了浅层水力压裂的裂缝监测验证试验。20世纪末, 日本九州大学地球物理研究实验室进行了一项针对注水压裂裂缝方位成像的地-电监测技术研究, 实现了油田开发注水的监测[3]; 2009年, 该实验室的Ho[4]研究了神经网络井-地电法三维反演, 在精度和运算时间上较传统算法有了较大提高; 2011年Marsala等[5]在沙特油气试验场地, 采用井-地电磁法技术成功监测了油田油水界面以及流体分布。
近几年来, 国内也逐渐重视井-地电法技术, 2001年张金成[6]已经在东部油田多次采用井间电法监测技术, 证实了井-地电法应用于油田注水监测中能够非常有效地确定水驱走向。2005年王志刚、何展翔[7]进行了井-地电法三维物理模型实验, 通过研究钢套管井中供电存在高阻或低阻异常体时, 地面电位等值线异常规律, 可为用井-地电法研究油气储层或水层的位置提供物理依据。2006年徐凯军、李桐林[8]采用有限差分计算井-地电法, 通过计算射孔段供电时地表观测电位, 反映射孔段的电阻率分布。2006年, 吉林大学针对油田水驱前缘探测而研制的基于电位法的ERT-Ⅰ 型电阻率成像仪[9]在辽河油田进行了水驱前缘探测实验, 得到了较好的效果。为了进一步增加探测深度, 提高系统分辨率, 本文研制了基于电位梯度法的NDRT-Ⅰ 型电位梯度采集系统, 通过实验室性能测试及大庆、辽河和长庆等油田的野外实验, 充分证明了该系统的有效性。
采用电位梯度探测法进行井-地水驱探测时, 发射系统通过金属套管向井中施加低频(0.n~n Hz)大电流作为激励源, 电位梯度采集系统测点放射状分布在被测井的周围, 探测地表电位梯度变化, 通过数据分析与解释推断出水驱方向。
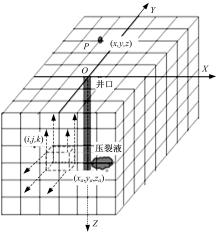
井-地电位梯度法理论仿真计算采用垂直有限线源三维异常电位有限差分法, 将大地进行三维网格化剖分, 如图1所示。以井口为坐标原点建立三维直角坐标系。将注水层等效成线电流源, 通过对点电流源线积分得到该线电源在地表产生的电位。点电流源位于大地模型的 
 | 图1 三维大地网格剖分示意图Fig.1 Three dimensional grids for the earth |
在实际计算中, 一般将地表任意一点电位 

式中: 
假设注水前大地为均匀半空间模型, 此时正常电位 
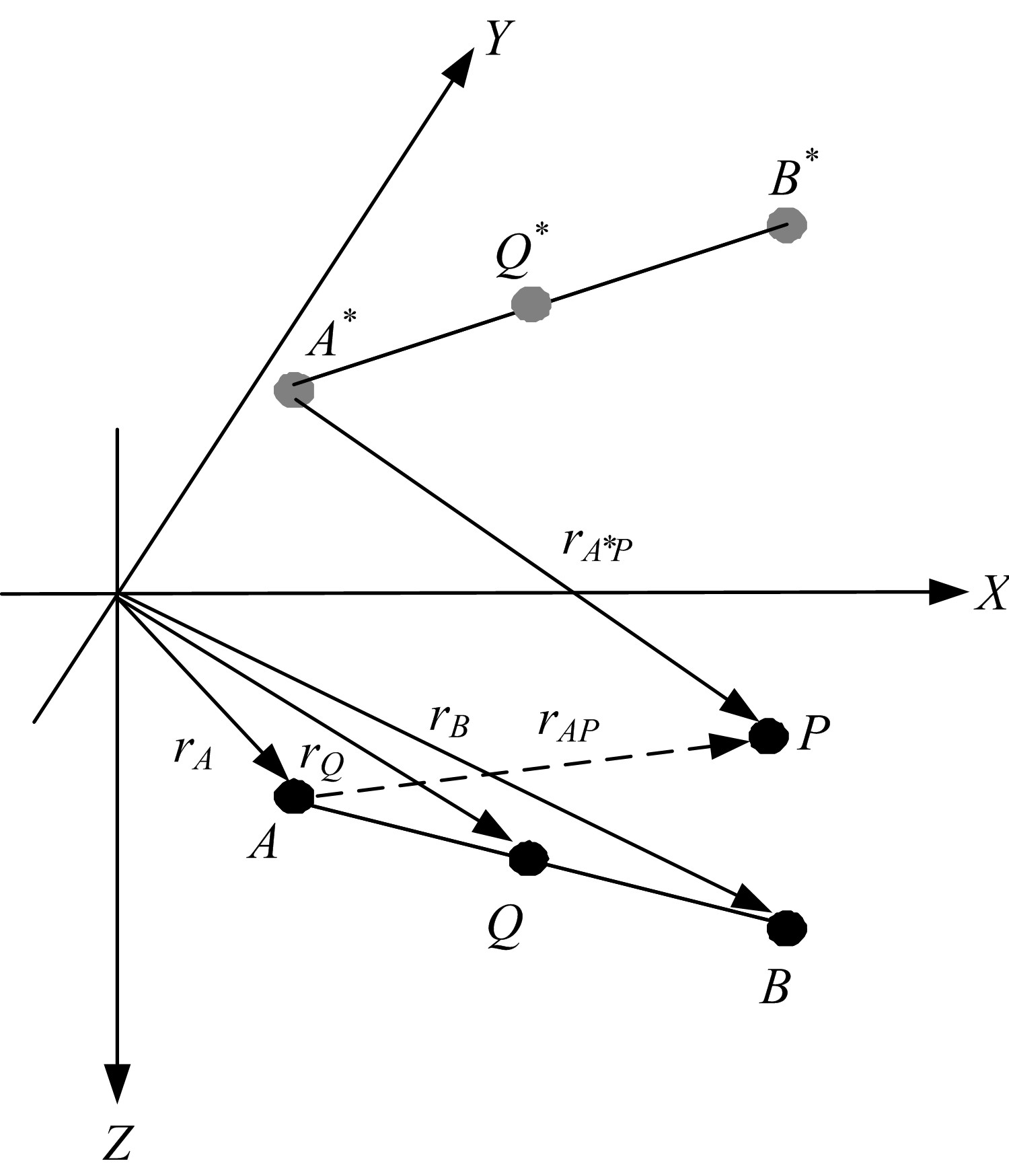 | 图2 任意线电流源电位计算示意图Fig.2 Schematic diagram of arbitrary line current source calculation |


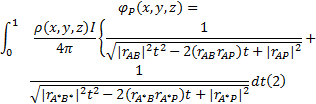
式中: 
设 

结合式(2)和式(3)可得到压裂后电位中的正常电位。而异常场电位 

式中: 
于是可得到求电位梯度的表达式:

分别将式(1)(2)带入式(5)可以得到注水前电位梯度 


实际测量时, 根据探测深度不同选择不同的铺设电极圈数。取典型观测参数I=15 A, 发射波形为1 Hz方波, 注水层为井下1000 m, 结合式(1)(2)(4)(5)建立模型求出的地表电位梯度达到10-5 V, 根据以上理论计算得到的电位梯度幅度, 要求系统具有最小探测信号为10-5 V的能力。
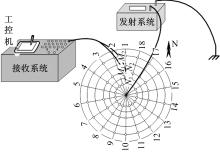
电位梯度法监测水驱方向时的信号频率比较低, 该系统采集时采样率设置为1 kHz, 每一通道采集时间为60 s, 假设铺设3圈电极(2圈的电位梯度), 每圈18个电极, 电位梯度采集系统野外工作原理如图3所示。
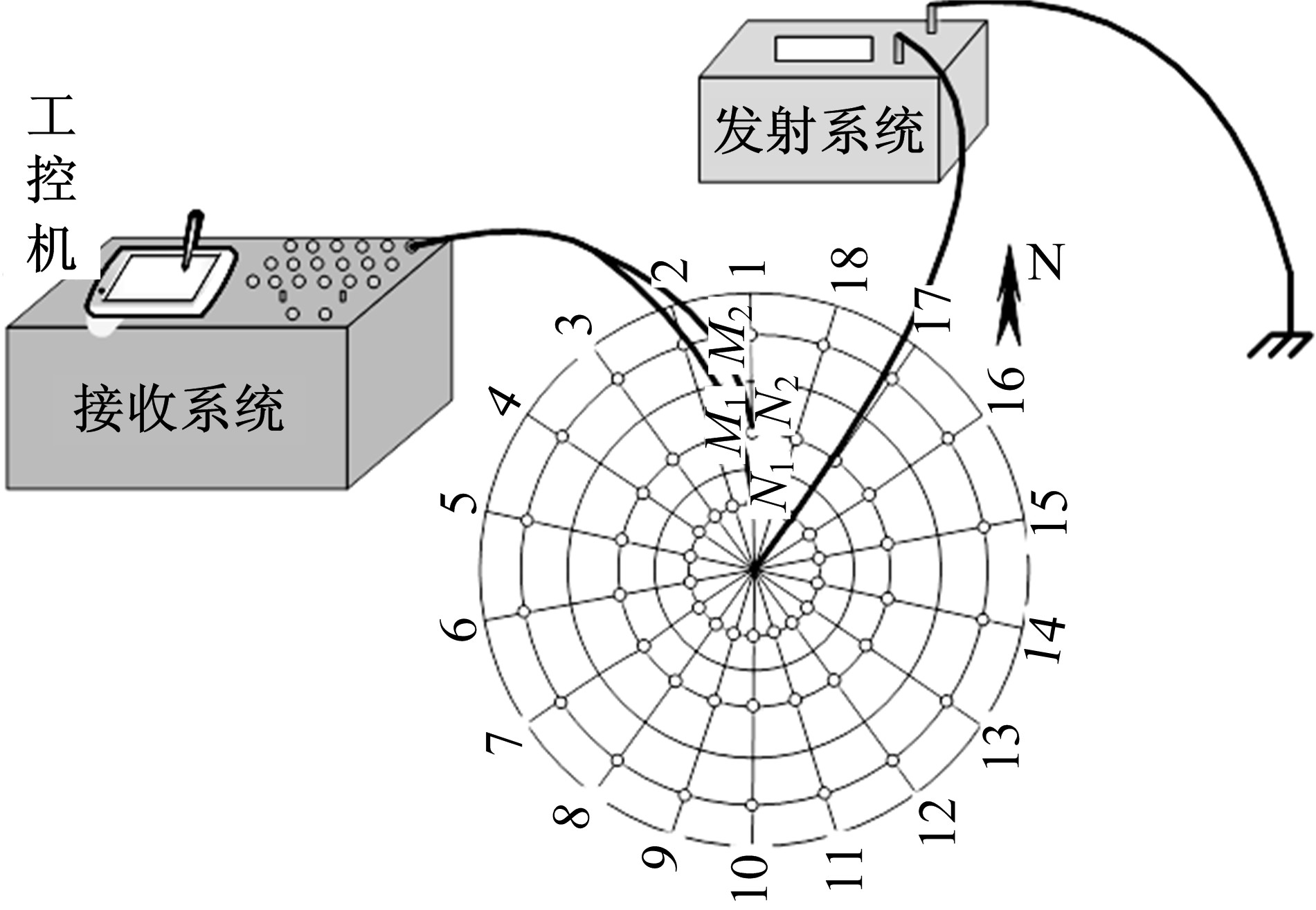 | 图3 电位梯度采集系统野外工作示意图Fig.3 Field work schematic diagram of potential gradient acquisition system |
每采集一圈电位梯度, 将数据上传一次, 整个系统单次采集产生的数据量 

式中: 

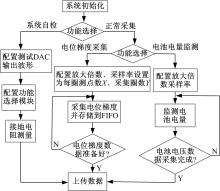
为能及时判断水驱驱油方向, 要求仪器系统必须兼顾实时采集和实时解释的能力。电位梯度采集系统采用Matlab与Labview联合编程技术[11]。通过Labview上位机控制采集系统采集数据并对数据进行预处理, 然后调用Matlab解释软件实时成像。
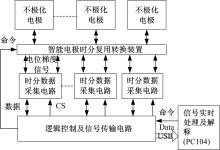
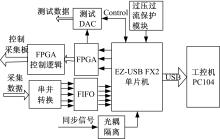
由理论计算可知, 若要准确探测油田深部水驱驱油方向, 必须设计高分辨率的电位梯度采集系统。基于此目的, 本文设计并研制了井-地NDRT-Ⅰ 型电位梯度采集系统, 总体框图如图4所示。主要包括前端传感、智能电极时分复用转换装置、时分数据采集装置、逻辑控制及信号传输电路、信号实时处理及解释软件。
 | 图4 NDRT-Ⅰ 型电位梯度采集系统总体结构框图Fig.4 Overall block diagram of NDRT-I direct potential gradient detection system |
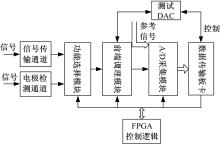
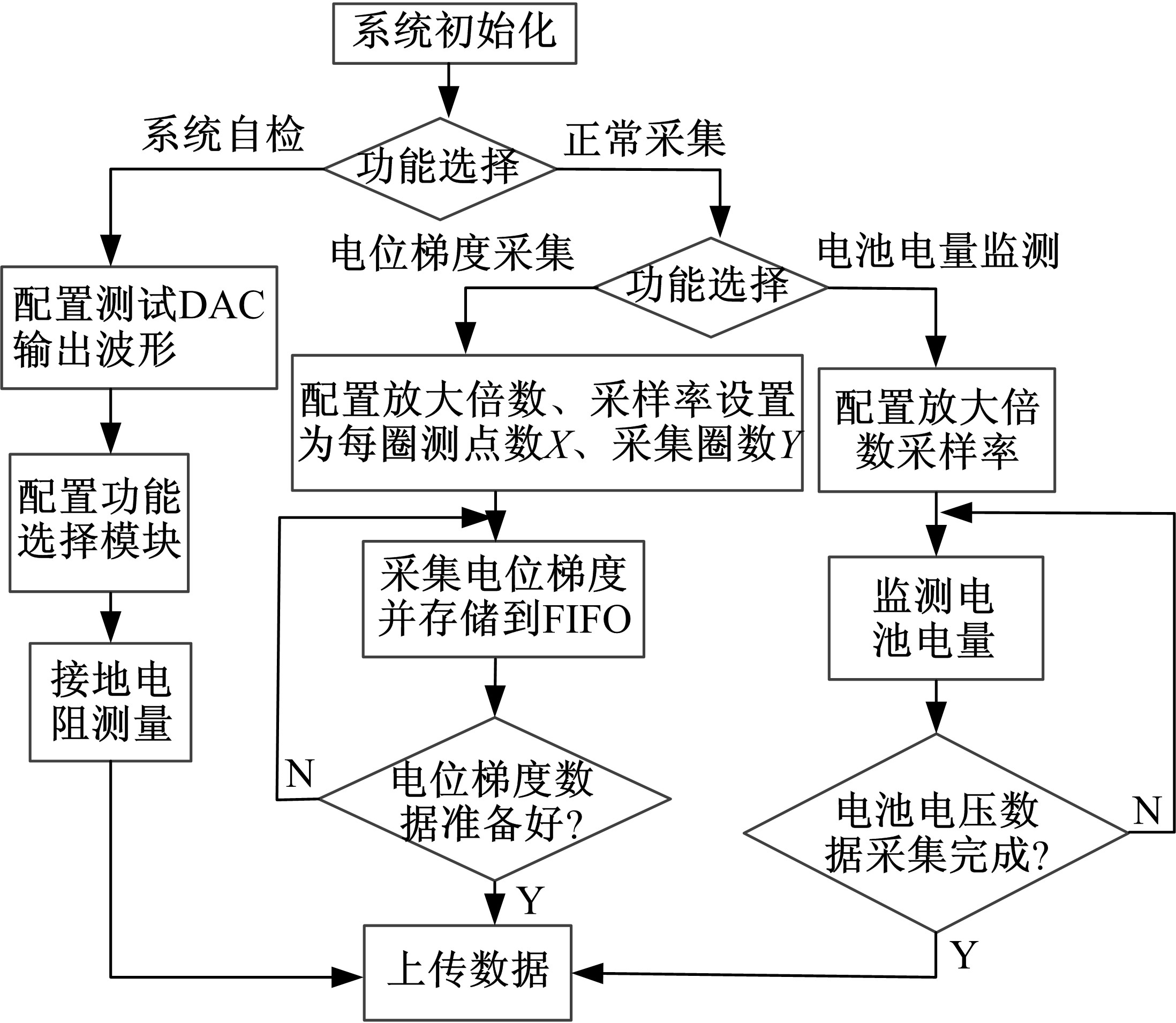
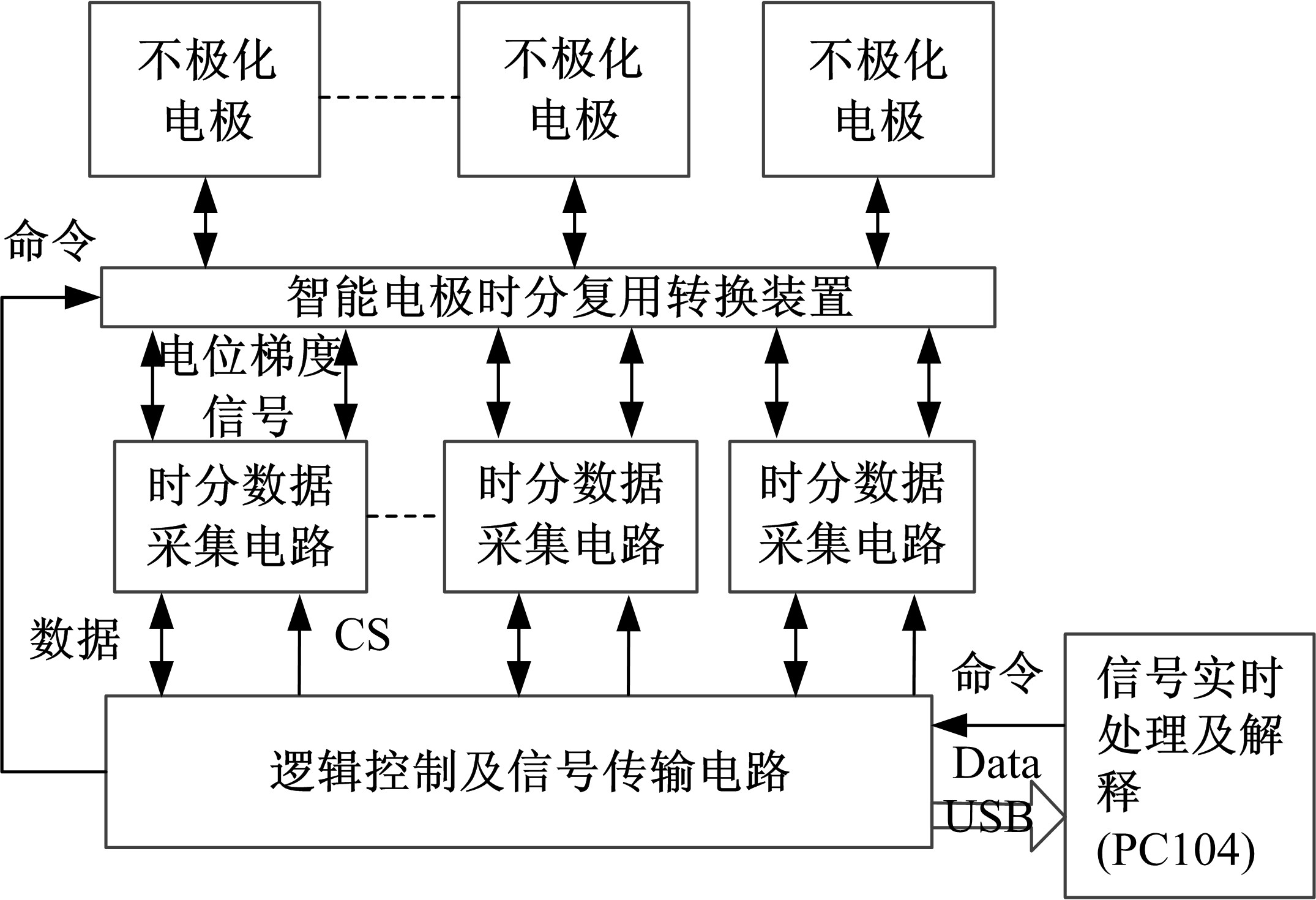
数据采集板主要包括智能电极时分复用转换装置和时分数据采集装置。时分复用数据采集装置由功能选择模块、前端调理模块和AD采集模块组成, 其结构框图如图5所示。其中, 前端调理模块包括前置放大、斩波自稳零和程控放大。
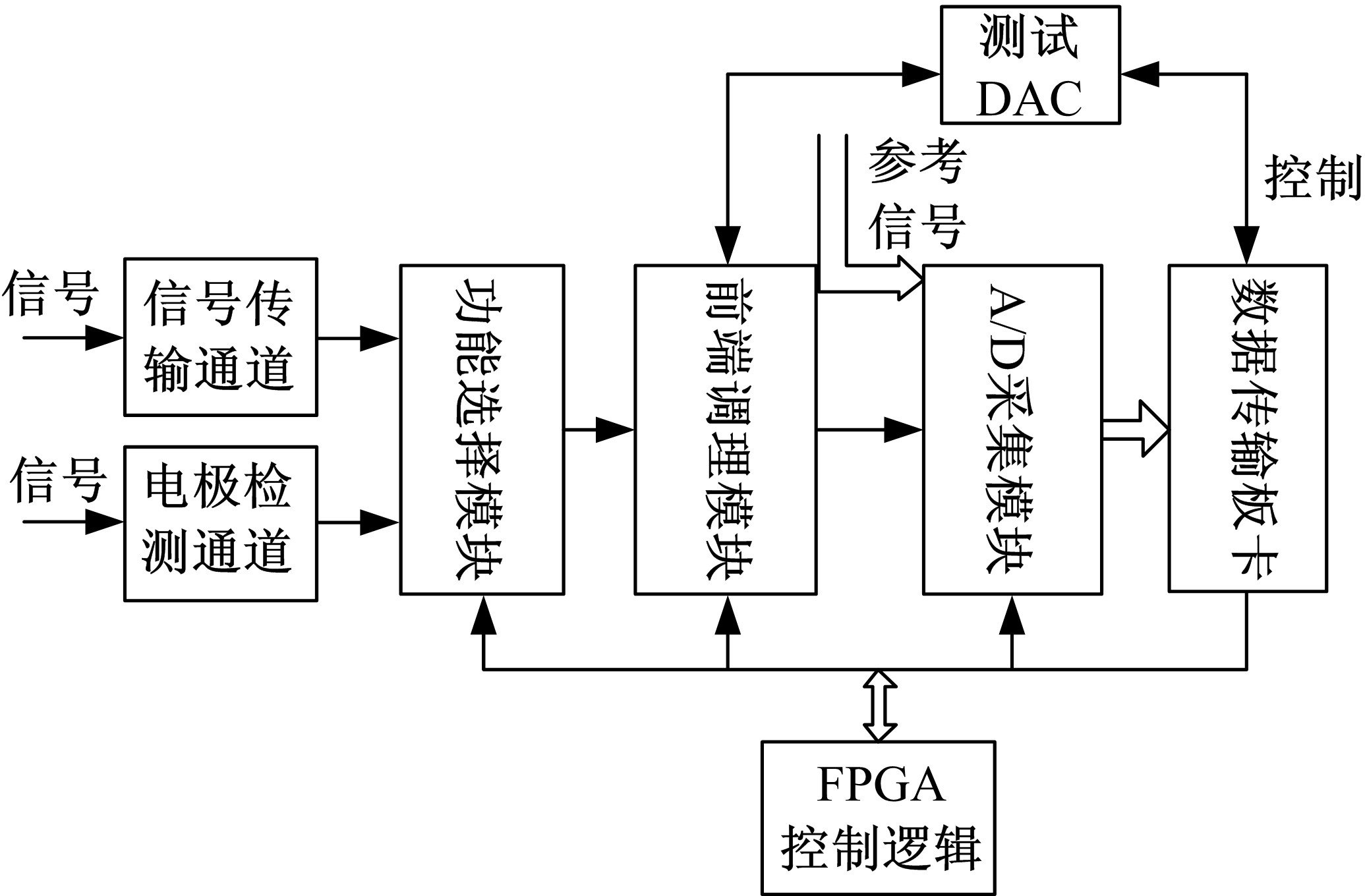 | 图5 数据采集板结构框图Fig.5 Block diagram of data acquisition board |
前端输入分为信号传输通道和电极检测通道。通过电极检测通道结合测试DAC对各个不极化电极进行性能检测, 以准确定位损坏或者接触不良的电极, 提高野外工作效率。
本系统采用的前置放大器为TI公司生产的高阻抗、低温漂、低噪声仪用放大器INA333, 其输入阻抗可高达100 GΩ , 零点漂移为0.1 μ V/℃, 最小共模抑制比为100 dB。由于电位梯度信号幅值比较小, 为了满足AD采集的需要, 本系统采用TI公司生产的低噪声PGA2500程控放大器, 放大倍数为1~128, 且可调。A/D采集部分采用了TI公司生产的高线性度、低漂移、低功耗ADS1256, 该芯片为24位无失码 
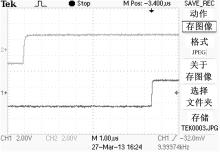
为满足多通道采集, 本系统采用扩展插槽设计思想, 数据传输板卡上设计了16个插槽, 其中, 模数转换模块ADS1256为四路差分输入, 它带有片选(CS), FPGA控制逻辑通过控制片选(CS)(见图4)实现所有数据采集板卡的轮换采集, 从而实现每圈最多64路的同步采集, 同步精度小于8 μ s, 测试结果如图6所示。同时, 智能电极时分复用转换装置在FPGA控制逻辑的控制下进行不同圈电极之间的智能切换, 满足野外大面积的数据采集。
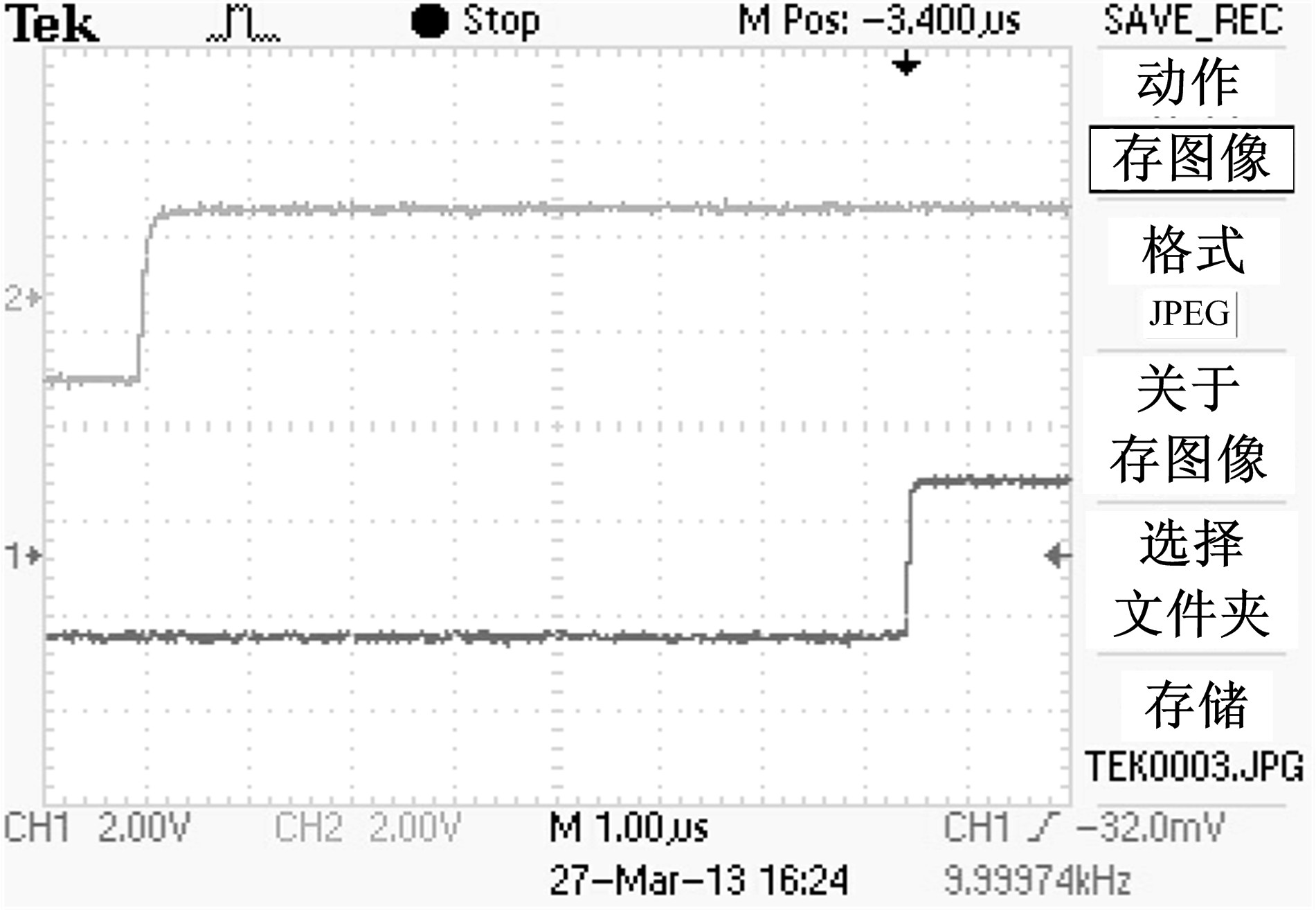 | 图6 同步精度测试图Fig.6 Synchronization accuracy test |
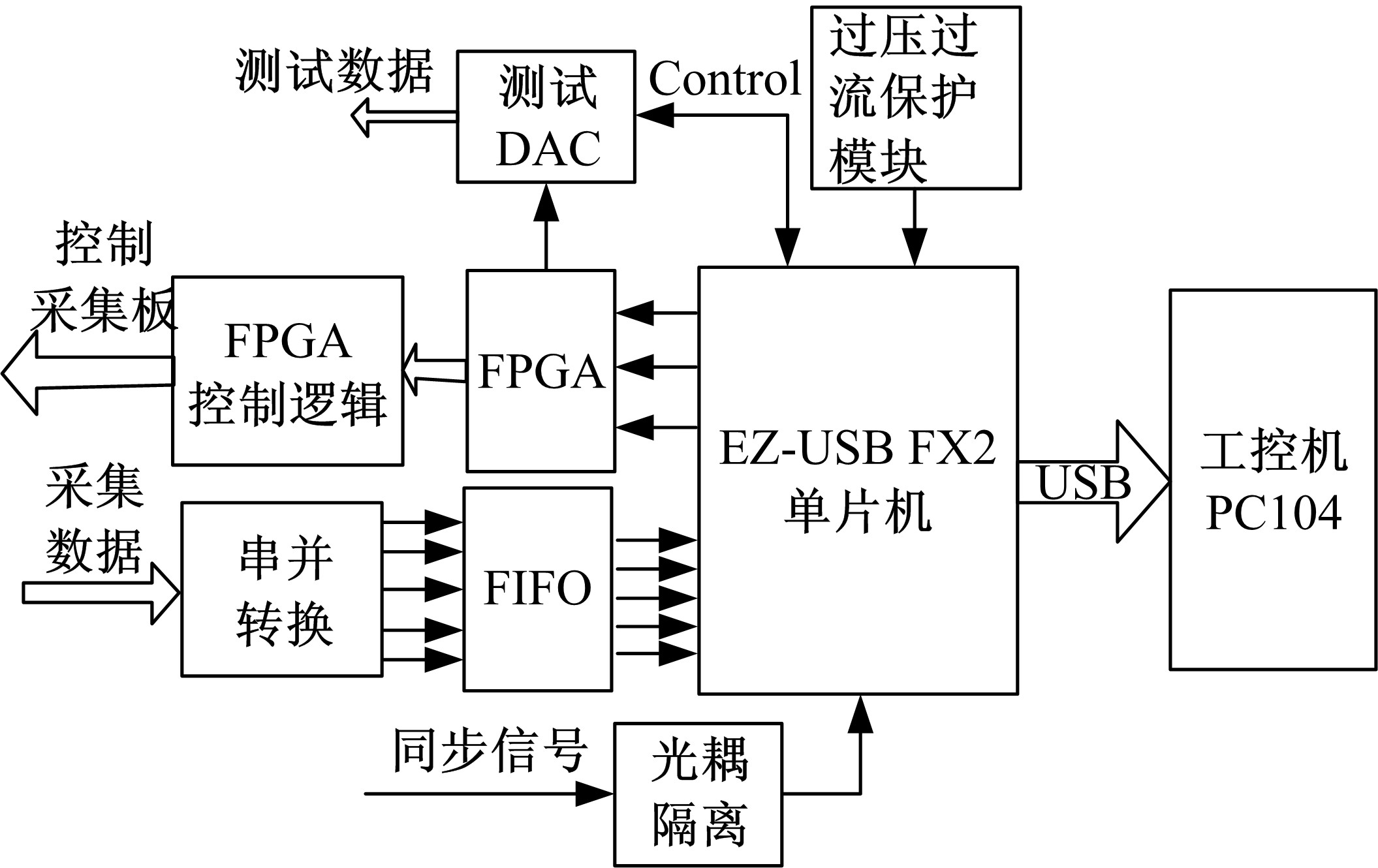 | 图7 逻辑电路及信号传输电路结构框图Fig.7 Block diagram of data transmission board |
上层软件采用Labview和Matlab混合编程, 主要包括上位机控制、数据处理和实时成像。
数据处理部分主要包括数字滤波和数字叠加。采用数字平均的方法压制随机噪声, 改善信噪比。平均值可以表示为[13]:

电位梯度法关心的主要是信号的幅度, 贝塞尔(Bessel)滤波器具有最平坦的幅度和相位响应。因此, 本系统滤波部分采用的是高阶贝塞尔低通滤波器。

其中 
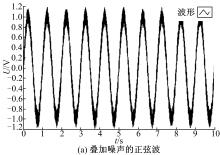
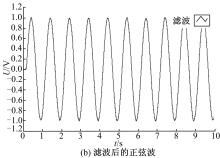
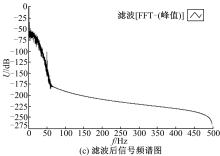
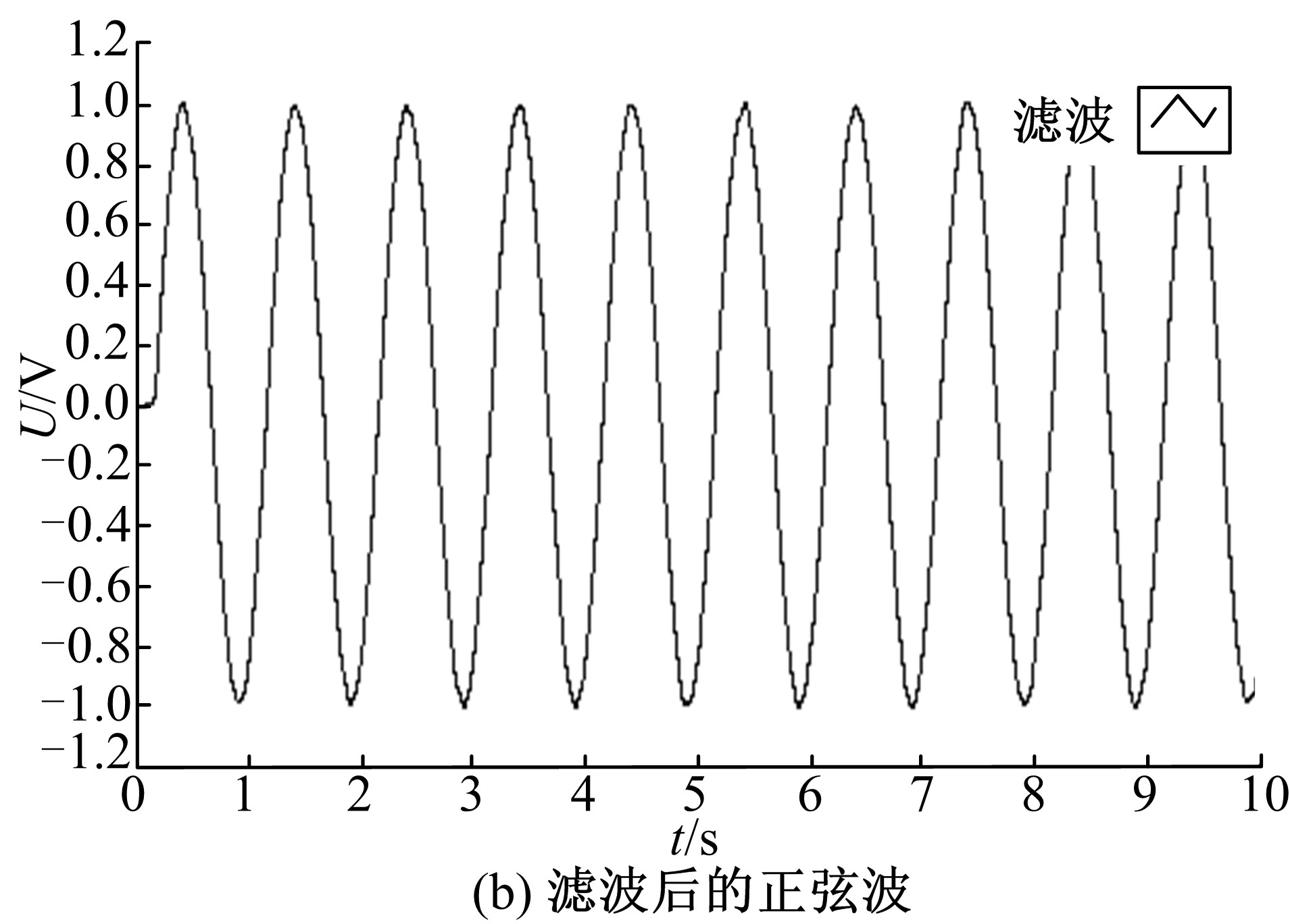
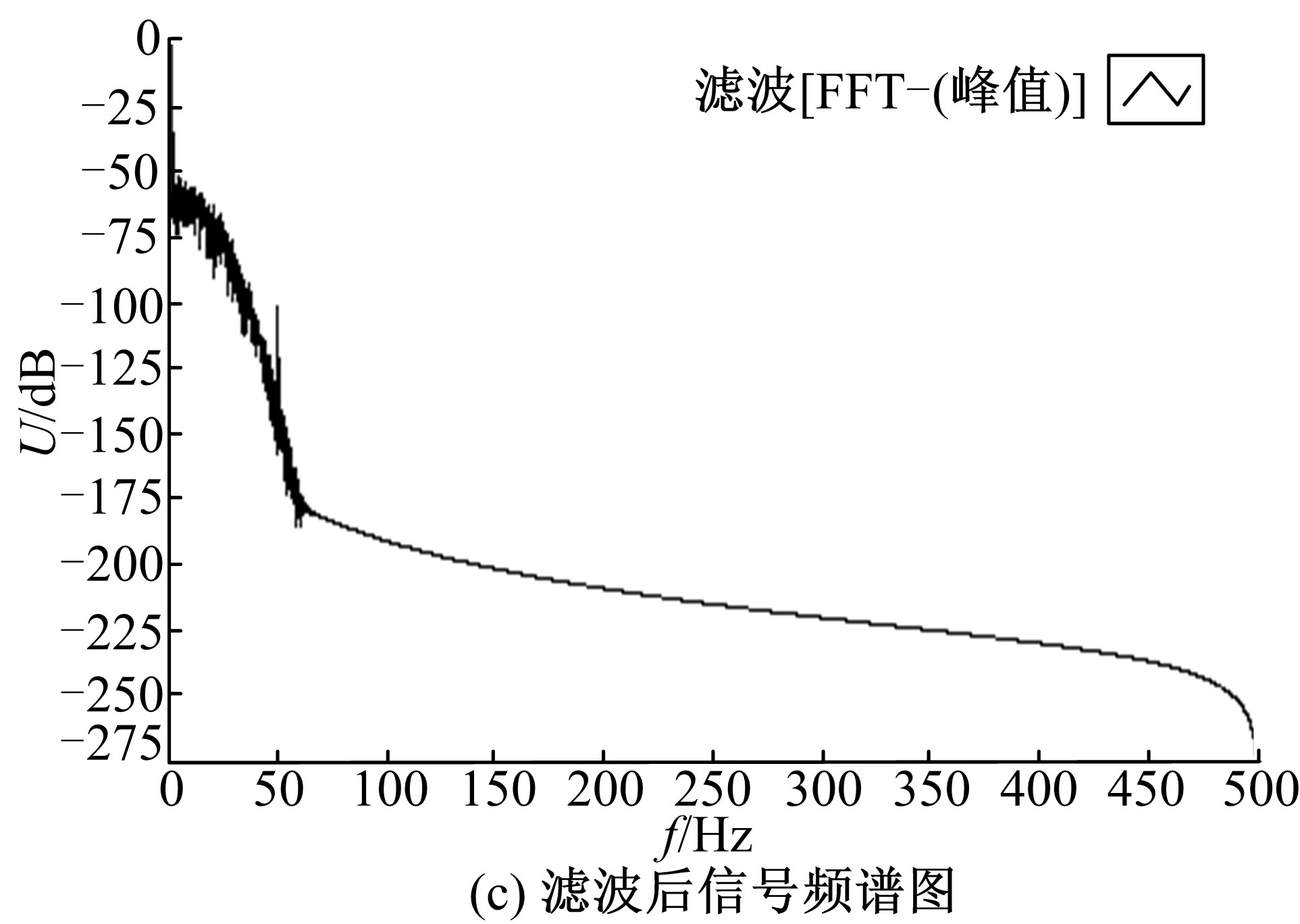
设计80阶贝塞尔低通滤波器, 加Hanning窗, 截止频率为15 Hz。输入波形为叠加白噪声和50 Hz工频干扰(野外采集时主要干扰为工频干扰)的正弦波。噪声信号幅值均为100 mV, 正弦信号幅值为1 V, 频率为1 Hz。结果如图9所示。
从图9(c)中可以看出, 50 Hz工频干扰衰减100 dB, 满足野外工作时的干扰抑制能力。
实时成像部分利用Labview里的MatlabScript节点调用Matlab程序, 通过注水前后各点的电位梯度之差揭示地下电阻率变化, 即水驱驱油方向。
(1)动态范围(Dynamic range, DR):动态范围是衡量一个数据采集系统的重要指标, 它是指系统允许的最大输入信号幅值与能分辨的最小信号的幅值之比[14], 如式(11)所示, 其中RMS(Root mean square)表示均方根。根据测出的归一化噪声有效值为0.8 μ V, 系统的最大输入信号范围为± 5 V, 则动态范围为130 dB。

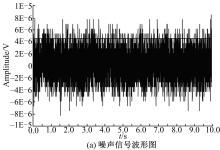
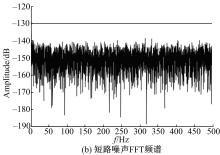
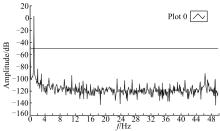
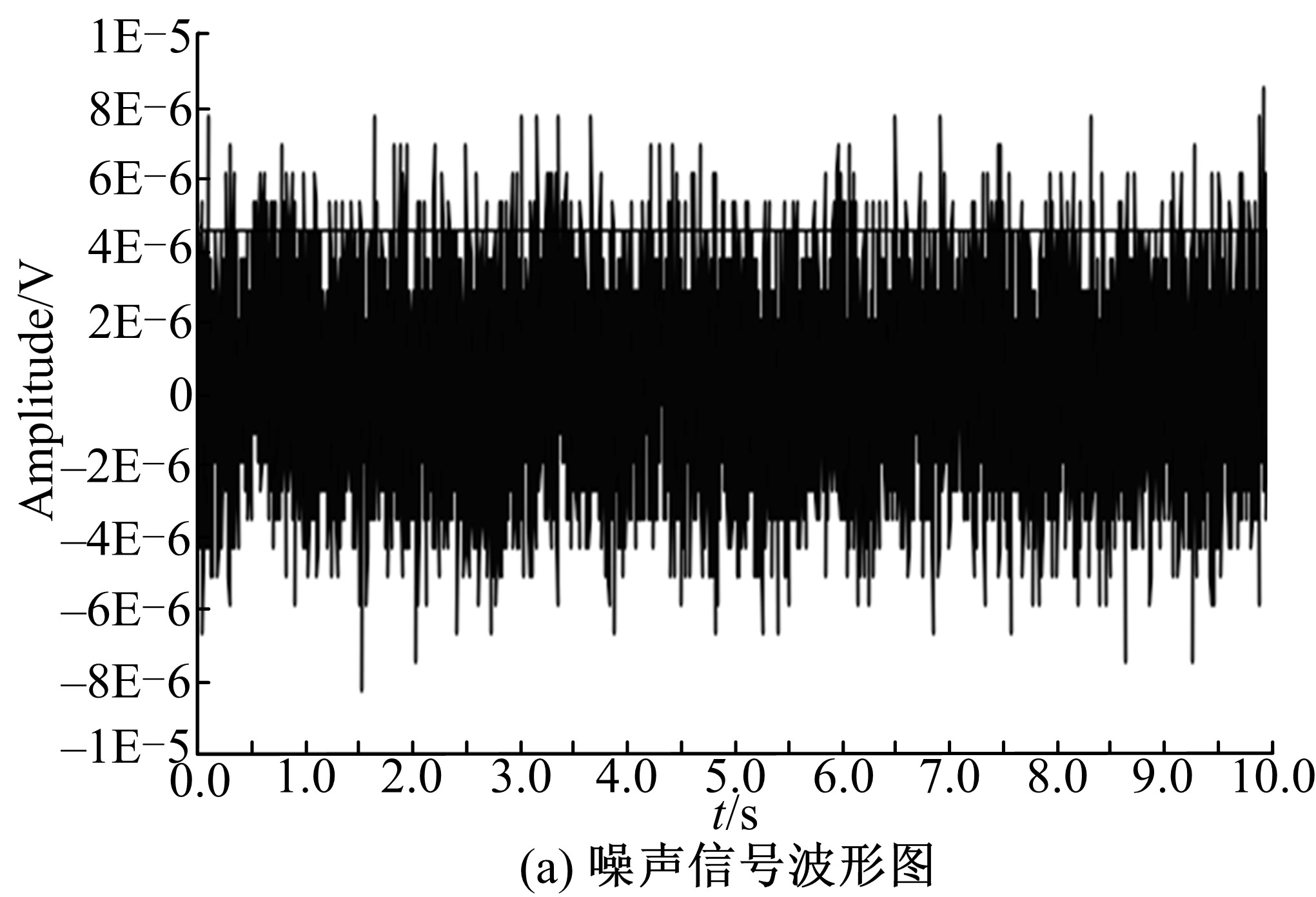
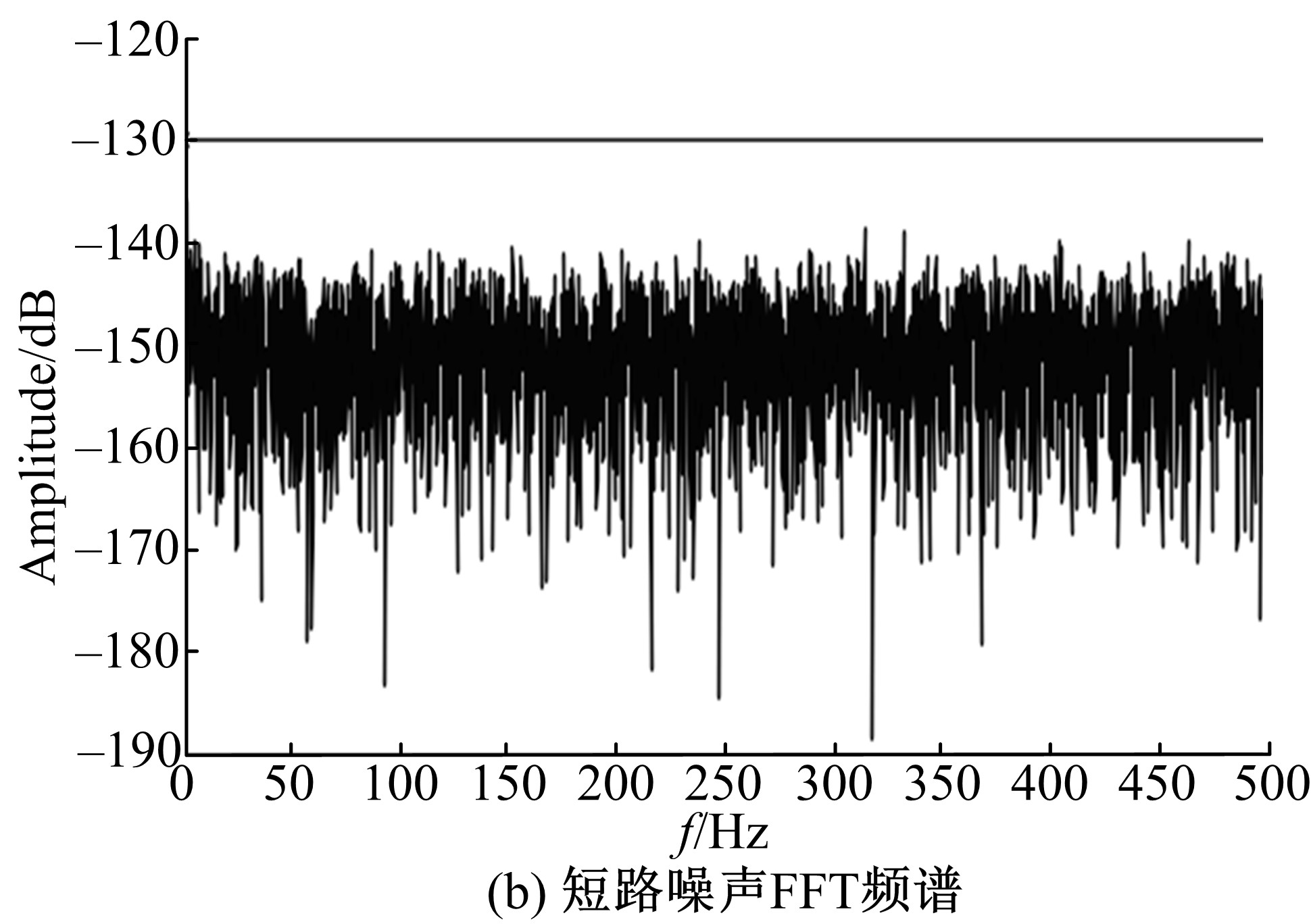
(2)短路噪声(Short circuit noise):将测试系统的输入端短接, 记录系统在短路情况下噪声的时间序列并进行频谱分析。图10为短路噪声测试结果, 从图10可看出峰值约为8× 10-6 V, FFT(均方根)频谱分析结果显示整个频带短路噪声幅度低于-130 dB。
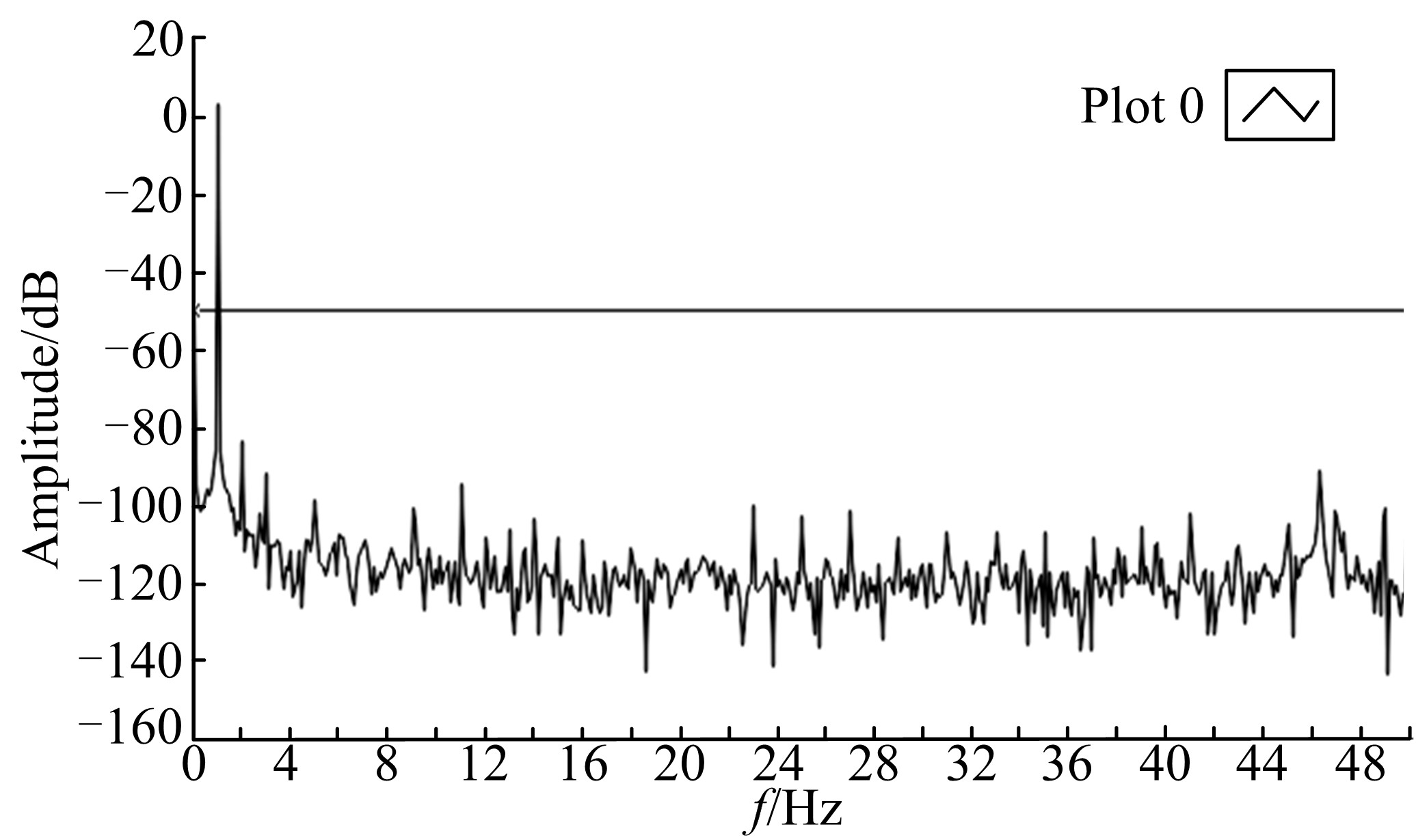
(3)谐波失真(THD):实际的ADC工作时会产生谐波。以 


图11为测试谐波失真的频谱图, 信号频率为1 Hz, 计算得THD值为-117.6 dB。
NDRT-Ⅰ 型电位梯度采集系统分辨率为微伏级, 而ERT-Ⅰ 型电阻率成像仪分辨率为0.1 mV, 澳大利亚的FlashRES64电法探测系统指标为:分辨率为微伏级, 电压通道数为61个, 对50 Hz工频干扰的抑制大于80 dB。NDRT-Ⅰ 型电位梯度采集系统实物图如图12所示。
被测井为大庆油田北四区8-丙69注水井, 注水层深1000 m, 该井附近有三口连通采油井, 如图14所示, 其中采油井1和采油井2正在进行采油作业, 采油井3已经停止采油作业。对该井进行两次测量:注水前背景场信号采集和注水后异常场信号采集。本次实验铺设三圈测点, 每圈18个电极。
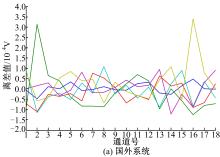
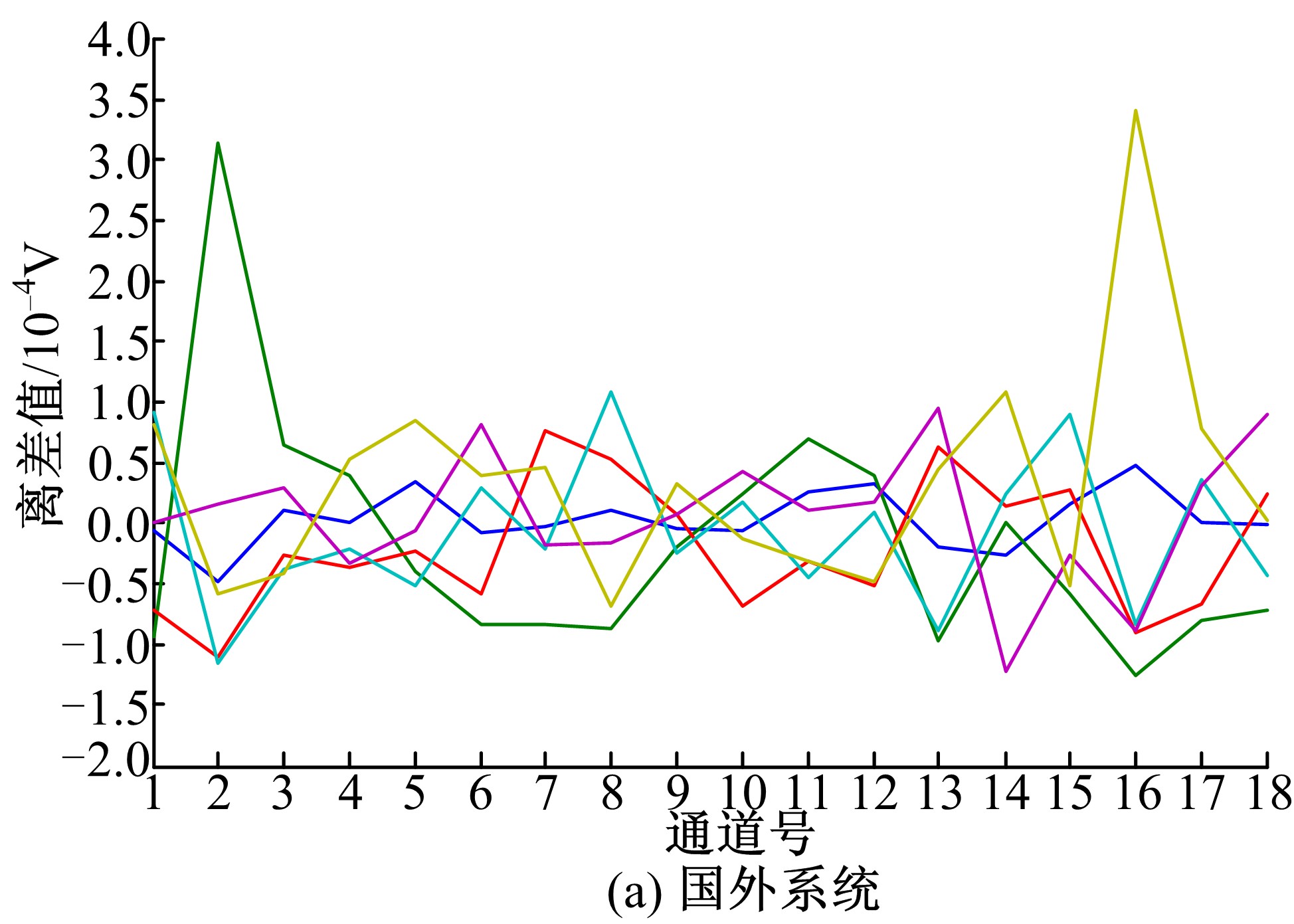
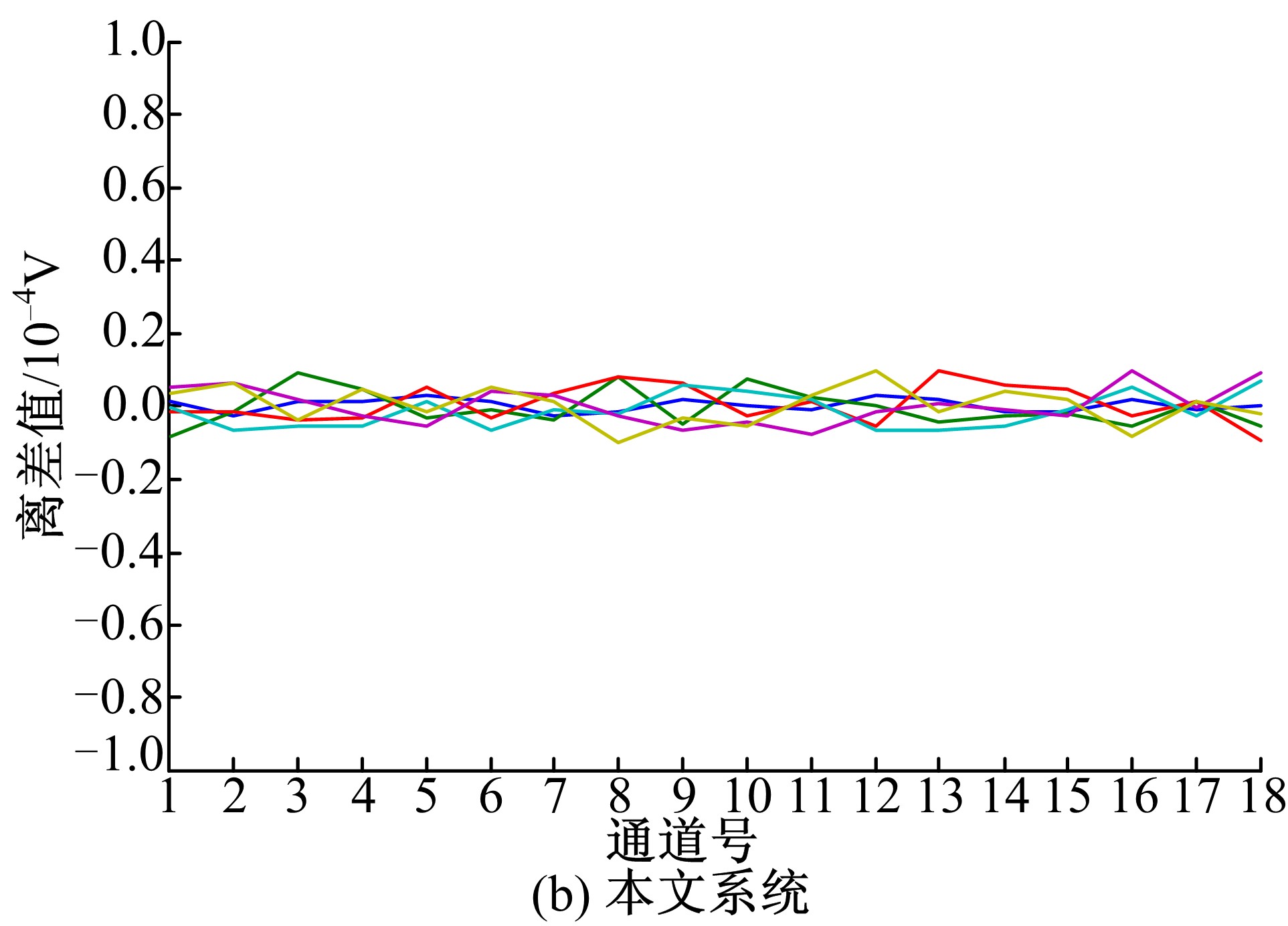
为检测NDRT-Ⅰ 型电位梯度探测系统的性能, 与国外同类系统进行了野外对比试验。国外系统采用地表电位测量方式, 通过计算求出电位梯度。图13为野外数据重复性对比, 注水前的实验数据均进行了多次采集并计算其离差。离差 
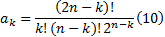
图14为用本系统与国外同类仪器对大庆油田北四区8-丙69注水井水驱方向测试结果对比图。
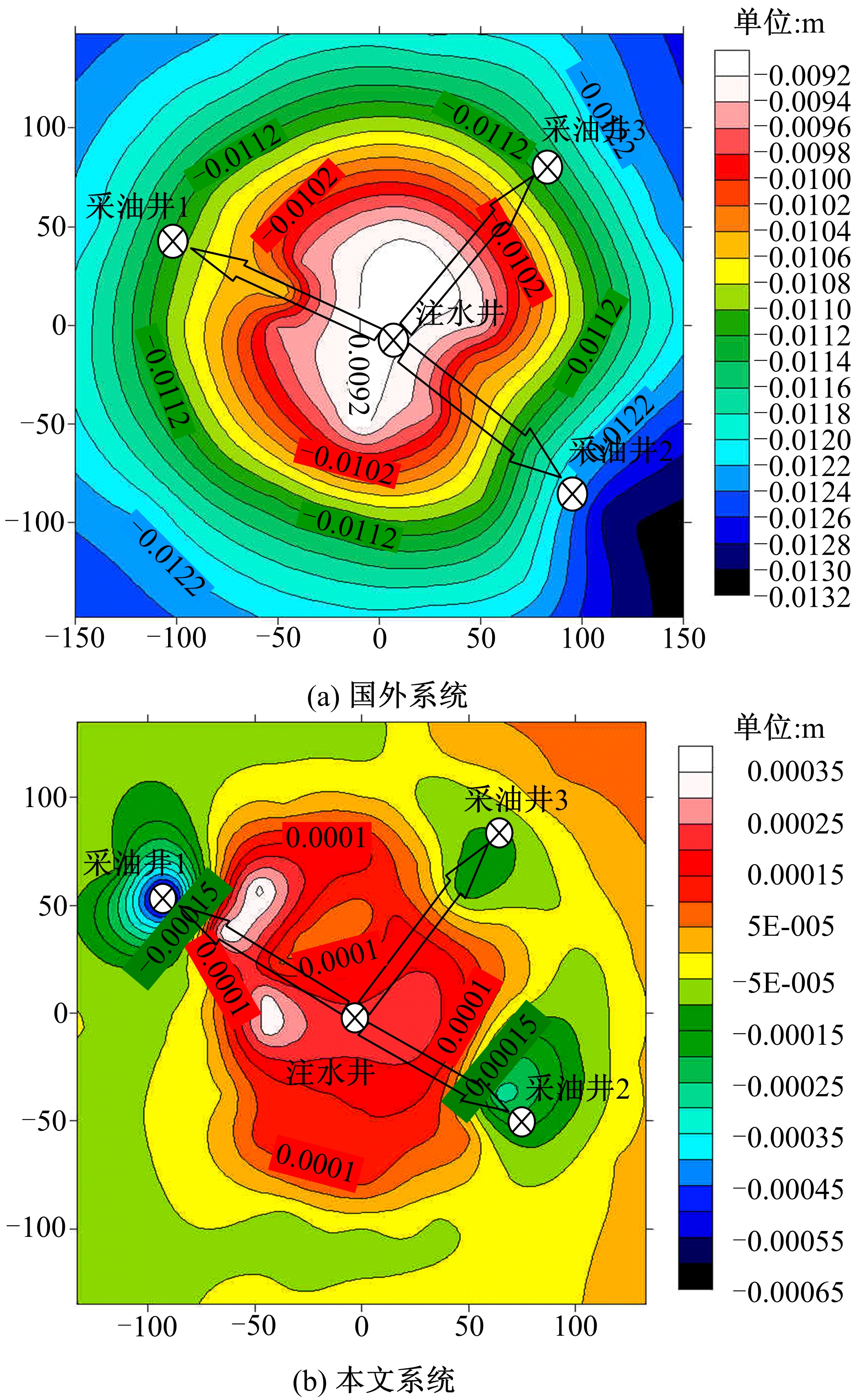 | 图14 本系统与国外系统野外勘探试验结果对比Fig.14 Comparison of exploration results between proposed system and foreign system |
等位线密集的地方为水驱异常方向。从图14中可以看出, 对于采油井1和采油井2两种系统测量结果一致性较好, 并且两种系统得到的结果均为采油井1水驱异常比较明显, 采油井2水驱异常不明显; 采油井3虽然为连通井, 由于已经不进行采集作业, 该方向流通性差, 水流比较小, 水驱异常更小, 而NDRT-Ⅰ 型电位梯度探测系统监测出了该方向的水驱异常, 如图14(b)所示。本系统采用电位梯度测量方式, 对干扰抑制能力比较强, 因此具有更高的信号分辨能力, 本系统测量的结果与实际情况更加吻合。
作者针对油田水驱驱油导致地下电阻率这一电性参数发生变化的特点, 采用垂直有限线源三维异常电位有限差分理论, 计算了电位梯度法在水驱前缘方向探测时的主要技术指标, 从而开发了高性能、高可靠性的多通道井-地电位梯度测试系统, 该系统采用24位Δ -Σ 结构ADC和插槽扩展思想实现了多通道的信号采集。通过实验室性能测试, 主要技术指标测试结果表明系统性能先进, 测量准确。通过与同类仪器的野外勘探对比试验, 验证了系统能够满足电位梯度方法探测的数据采集需求。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|