液压机械臂基于反演的自适应二阶滑模控制
 , 王蒙
, 王蒙 Adaptive second order sliding mode control for hydraulic manipulator based on backstepping
LI Yuan-chun1 , WANG Meng2 , SHENG LI-hui3 , ZHAO Bo1, 4
, WANG Meng 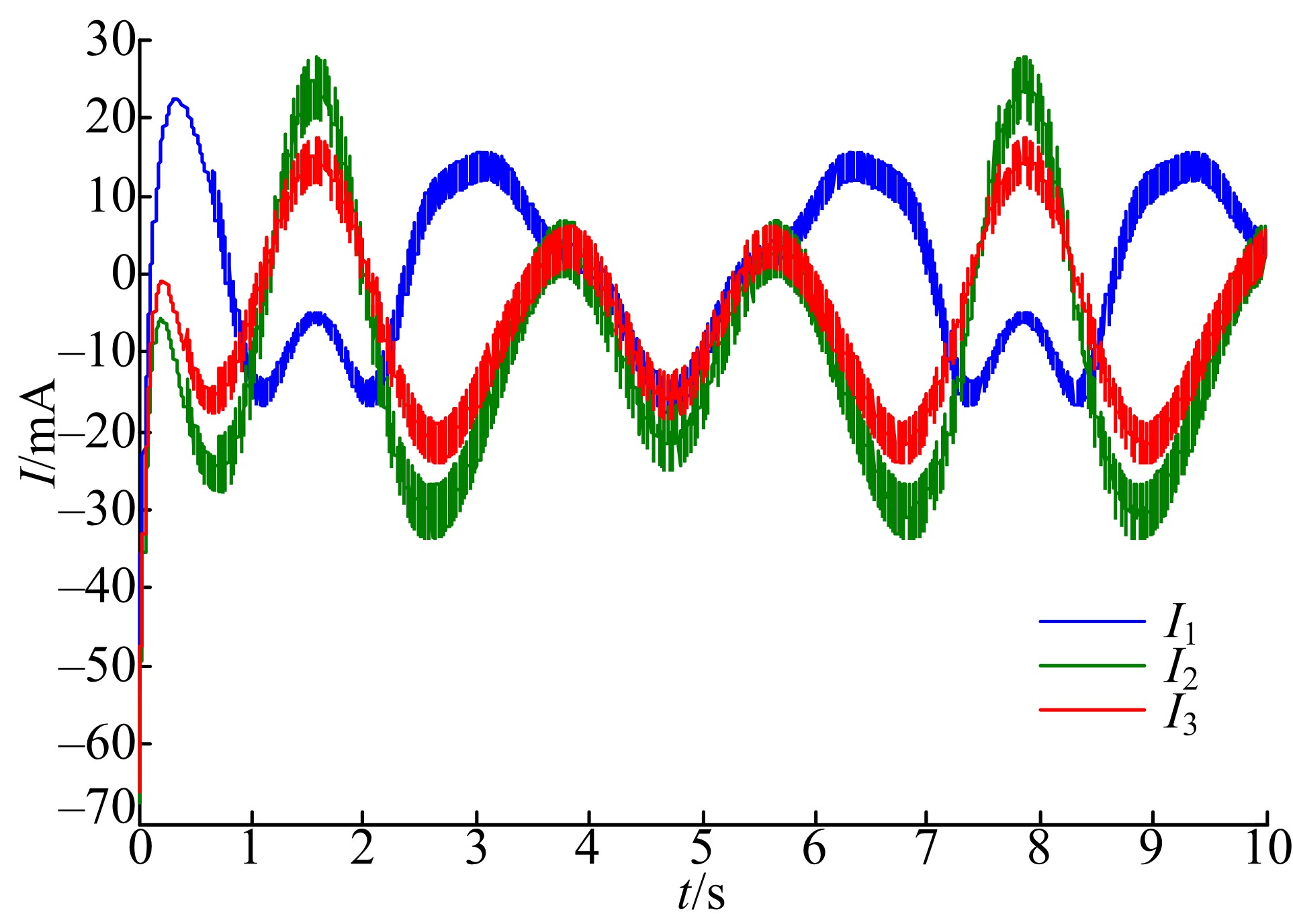
液压机械臂基于反演的自适应二阶滑模控制 |
|
李元春, 王蒙 |
Adaptive second order sliding mode control for hydraulic manipulator based on backstepping |
|
LI Yuan-chun
, WANG Meng |
| 有总体不确定性自适应滑模控制电流曲线 |
| |