











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于网格聚类的热点路径探测
[吴俊伟1, 2  , 朱云龙
, 朱云龙1 , 库涛1 , 王亮1, 2 ]
, 朱云龙|
|


作者简介:吴俊伟(1982-),男,博士研究生.研究方向:移动数据挖掘.E-mail:wujunwei@sia.cn
针对现有热点路径探测算法需要路网拓扑结构的支持,以及难以准确识别热点路径的复杂耦合现象的问题,提出了一种基于网格聚类的热点路径探测算法。算法将移动轨迹映射为网格序列,以邻接网格间的共有轨迹量来定义网格间的密度可达性,并据此将网格分划抽象为图模型。然后以图论中的相关理论为基础提出了网格聚类算法GridGrowth,即热点路径探测算法。实验结果表明:本文算法能有效探测热点路径,且能准确识别热点路径的复杂耦合现象。
Existing algorithms for hot route detection are difficult to solve the complex coupled problem of hot routes, or they need the support of road network topologies. In order to overcome these disadvantages, we present a hot route detection algorithm based on grid clustering. In this algorithm the trajectory is converted to grid sequence, and the density reachability of the neighbor grids is determined based on their common traffic, and then the grids are abstracted to a graph model. So the grid clustering algorithm, GridGrowth, can be presented based on the graph theory, i.e. the hot route detection algorithm. Experimental results show that the proposed algorithm can effectively detect the hot routes and can accurately solve the complex coupled problem of the hot routes.
近年来, 随着定位技术的成熟以及定位设备的普及, 面向不同应用领域的移动终端产生了大量的轨迹数据。这些数据中蕴藏着丰富的知识, 它能反映人们的移动规律, 能体现交通状况, 能揭示路网结构。现今, 与之相关的数据挖掘研究越来越受到关注, 其中一项比较有现实意义的研究就是从移动轨迹中探测热点路径。热点路径能反映人们在移动过程中对某地理区域的关注程度或依赖程度, 也能一定程度地揭示人们的移动规律或行为模式。它可用于城市规划、交通管理、广告投放等领域的决策支持。
目前, 关于从移动轨迹中探测热点路径的理论研究还不多, 一些可用于热点路径探测的方法主要包括移动对象聚类[1, 2, 3]、轨迹聚类[4, 5, 6, 7, 8]等。其中, 移动对象聚类是将一起移动的对象聚类到一起, 每个聚类中的轨迹就可以代表一条热点路径。这种方法易于更多地发现短聚类而遗漏对象的整体移动性。基于轨迹聚类的探测方法则是以轨迹为基本聚类对象, 不考虑子轨迹间的相似性, 这样会导致算法无法处理热点路径的一些复杂耦合现象, 如汇聚、分裂或急转等。为解决传统算法的这些弊端, 2007年Li等[9]提出了FlowScan算法用于解决路网中热点路径的发现。这是一种以道路的流量密度为基础的算法, 它以相邻路段的密度可达性作为两路段是否属于同一热点路径的依据, 不要求属于同一热点路径的两路段物理相连, 只需要它们在一定范围内相邻即可。所以它能正确识别热点路径的耦合现象。但此算法的实现需要完整的路网拓扑结构的支持, 也需要将轨迹点都精确地匹配到各路段上, 这就一定程度地限制了算法的适用性。
为了能克服传统算法的缺点, 同时又避免路网结构、地图匹配等因素的限制, 本文提出了一种基于网格聚类的算法GridGrowth。本文算法将整个目标区域划分为若干小网格区域, 并将移动轨迹映射为网格序列; 然后以邻接网格的共有轨迹量为基础来定义网格间的可达性, 将网格分划抽象为图和树的模型; 这样就可以使用图论的相关算法进行网格聚类, 以达到找寻热点路径的目的。
轨迹(Trajectory)是空间位置随时间连续变化的时空映射, 通常使用由间隔取样点构成的序列来表示轨迹。若移动对象在 
热点路径可以表示为在一段时间内移动对象频繁经过的路段, 通常它具有以下属性:①方向:即它应有起始点、终止点; ②距离:热点路径应具有一定的长度, 且应尽量保持长度的最大化; ③热度:即路径权重, 用以标识某路径上轨迹的频繁程度。
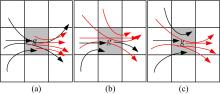
本文定义的热点路径不再是路段, 而是网格序列, 从宏观层面上看这种序列可以理解为粗粒度的路径。这样的路径表达依然面临几种难以处理的耦合现象, 如图1所示。
 | 图1 热点路径间三种耦合关系Fig.1 Three coupling relations between hot routes |
(1)分裂:如图1(a)所示, 大量轨迹从 
(2)汇聚:如图1(b)所示, 与分裂的情况类似, 这时也不应将 
(3)重叠:如图1(c)所示, 路线 
文献[9]提出的FlowScan算法很好地解决了在路网条件下的热点路径耦合问题, 本文接下来将在无路网支持的条件下使用基于网格聚类的算法解决如上三类问题。
聚类是根据距离或密度等条件将属于同一类别的对象聚为一类, 将不同类别的对象划分开, 同一类簇内对象的相似性要尽可能大, 不同类簇内对象的相似性要尽可能小。本文提出的聚类算法与通常的概念有所区别, 其特殊性在于:
(1)类簇中的基本对象是网格单元, 有别于通常意义上的点。
(2)每个类簇实为一个网格序列, 序列中的前后邻居在地理区域上也是邻接区域, 每个类簇就对应于一条热点路径。
(3)对象间的相似性依据是“ 直接密度可达” (在3.1节中给出定义), 而不是时空距离。
本文算法基于一种简单思想:若两个网格区域之间存在大量的轨迹流, 那么这两个网格区域很可能是某一热点路径的一部分; 同样, 若一串前后相邻的网格序列中包含有相当多的共同轨迹, 即有相当多的移动对象都连续经过了这些网格区域, 那么就可以认为这一串网格序列包含有一条完整的热点路径。下面给出相关定义和具体算法。
定义1 区域网格划分:给定一地理区域, 将其表达为二维空间 
定义2 轨迹的网格序列:一条轨迹所经过的网格单元的序列。
定义3 网格的流量: 

定义4 直接密度可达:网格单元 

定义5 网格生成图:若将每个网格单元视作一个顶点, 则直接密度可达的网格单元可使用有向边表示, 网格单元间的共同轨迹数量即为有向边的权重。这样所有网格区域便可映射为一个图 
定义6 路径密度可达:对于一条网格单元链 
定义6中的 



 | 图2 热点路径中轨迹的不同起始点Fig.2 Different starting positions of trajectories in hot route |
要找到所有热点路径需要两个步骤:①找到所有热点路径的起始区域; ②利用聚类方法从热点路径起始区域开始搜索, 将属于同一热点路径的所有网格区域都聚到一起。
2.2.1 热点路径起始区域
在以下三种情况下一个网格区域可能会成为热点路径的开始:
(1)如图3(a)所示, 当从区域 
(2)如图3(b)所示, 当 



(3)如图3(c)所示, 当前两种情况都不满足, 而进入 


 | 图3 热点路径起始区域的三种情况, λ =4Fig.3 Three kinds of start area of hot route |
考虑上述三种情况, 可以给出热点路径起始区域的概念。
定义7 热点路径起始区域:给定最小密度可达阈值 
(1) 


(2) 



(3) 



那么, 是不是所有热点路径都开始于热点路径起始区域呢?下面针对这个问题给出结论和证明。
引理1 所有热点路径都是开始于热点路径起始区域。
证明 对于第一种情况, 只要从区域 









2.2.2 聚类过程
使用定义7的规则依次判断所有网格单元就能找到所有热点路径起始区域, 然后利用定义6的规则从每个起始区域开始聚类搜索, 判断滑动窗口内的网格区域是否直接密度可达, 若是, 则加入聚类; 若不是, 则停止迭代, 完成聚类。这样便能找到所有热点路径。那么, 如何在众多的网格单元中有效地完成聚类搜索呢?不失一般性, 假设每个热点路径起始区域都有多个密度可达的邻接区域, 且其每个邻接区域同时有多个密度可达的二级邻接区域, 那么从热点路径起始区域开始的搜索空间可以构造成以起始区域为根节点的4叉树(每个网格单元最多有4个邻接单元), 这样网格生成图就简化为多个4叉树。显然, 使用深度优先搜索算法对树的每个分支逐个搜索就能找到所有以根节点起始的热点路径。在搜索某个分支时每向下递进一级, 就使用定义6判断滑动窗口内的网格是否满足条件, 若满足则将当前节点对应的网格区域加入热点路径中, 若不满足则终止当前分支的搜索, 完成一条热点路径, 然后开始搜索下一个分支, 直至所有分支搜索完毕。
2.2.3 本文算法
总结以上过程, 可给出热点路径探测算法如下:
算法1 GridGrowth
输入:网格矩阵M, 轨迹数据集合T, 轨迹量阈值λ , 窗口宽度ε
输出:热点路径集合R
Hot_Route_Set GridGrowth(Matrix M, Trj_Set T, Min_Traffic λ , Win_Width ε ){
1.初始化R为空集;
2.将M转换为网格生成图G;
3.找到所有热点路径起始区域S;
4.foreach(Hot_Route_Start_Area s in S){
5. r=new Hot_Route();
6. SearchHotRoute(s, r, R);
7.}
8.Return R;
}
void SearchHotRoute (Hot_Route_Start_Area s, Hot_Route r, Hot_Route_Set R){
1.N=s的直接密度可达的邻接区域集合;
2. if(N!=null){
3. foreach(Neighbor_Grid n in N){
4. if(路径密度可达条件能够满足){//滑动窗口重叠邻接区域n, 按照定义6判断
5. r’ =Copy(r); //生成r的副本
6. r’ .Add(n); //将当前区域追加到路径末尾
7. Search_Hot_Route(n, r’ , R);
8. }
9. else
10. R.Add(r); //完成当前分支的搜索, 将找到的热点路径加入到集合中
11. }
12. }
13. else
14. R.Add(r); //当前网格单元没有直接密度可达的邻接区域, 完成此次迭代
}
为了证明本文算法所找到的, 热点路径是完备的, 给出如下引理及证明。
引理2 给定 
证明 只要给定直接密度可达阈值λ , 那么依照定义7找到的热点路径起始区域的集合一定是完备的。这是因为热点路径起始区域是严格依照定义7逐个网格查找的, 不存在某个网格单元被遗漏或不满足定义的条件却又是起始区域的情况。又因为在给定 

实验中所用的数据是深圳市2011-04-18~2011-04-26期间的出租车GPS轨迹数据, 车辆总数为13 798台, 记录的采集间隔不恒定(间隔≥ 30 s)。数据格式如下:
name:车牌号;
time:采集时间点;
jd:经度;
wd:纬度;
status:车辆状态(0=非打表, 即空载; 1=已打表, 即重载);
v:车速(单位为:km/h);
angle:行车方向(0=东; 1=东南; 2=南; 3=西南; 4=西; 5=西北; 6=北; 7=东北)。
轨迹的划分以车辆的状态变化(status值)为依据, 当status值由0变为1时表明有乘客开始乘车, 当status由1变为0时表明乘客下车, 这时认为车辆完成了一次有意义的轨迹。这样的轨迹记录了人们的实际出行行为, 那么利用这些轨迹所挖掘出的热点路径能真正揭示人们的移动规律。
实验中所研究的目标区域只取深圳市的某一核心区域(113.79≤ jd≤ 114.18; 22.46≤ wd≤ 22.7), GPS数据也取自这个范围内。经统计这一区域白天的轨迹量在13 500条/h左右。图4显示的是此区域内1 h内的轨迹分布状况。
 | 图4 轨迹分布图(红色为轨迹, 灰色为路网)Fig.4 Taxi traces in Shenzhen City |
算法中共有4个参数:最小密度可达阈值 
对于λ , 可以设置为固定值, 比如30/h。从常识可以判断, 若一个网格 












对于ε , 则跟网格单元大小有关。若网格很小, 比如长、宽均为100 m, 而一条路径的长度可能要超过1000 m才能将它视为热点路径, 那么 
网格大小与研究区域的总面积大小和算法效率等因素有关。一般认为, 一个网格的长或宽在300~600 m比较合适。至于 
实验中将根据不同的参数值对算法结果做几组对比:首先对比不同 
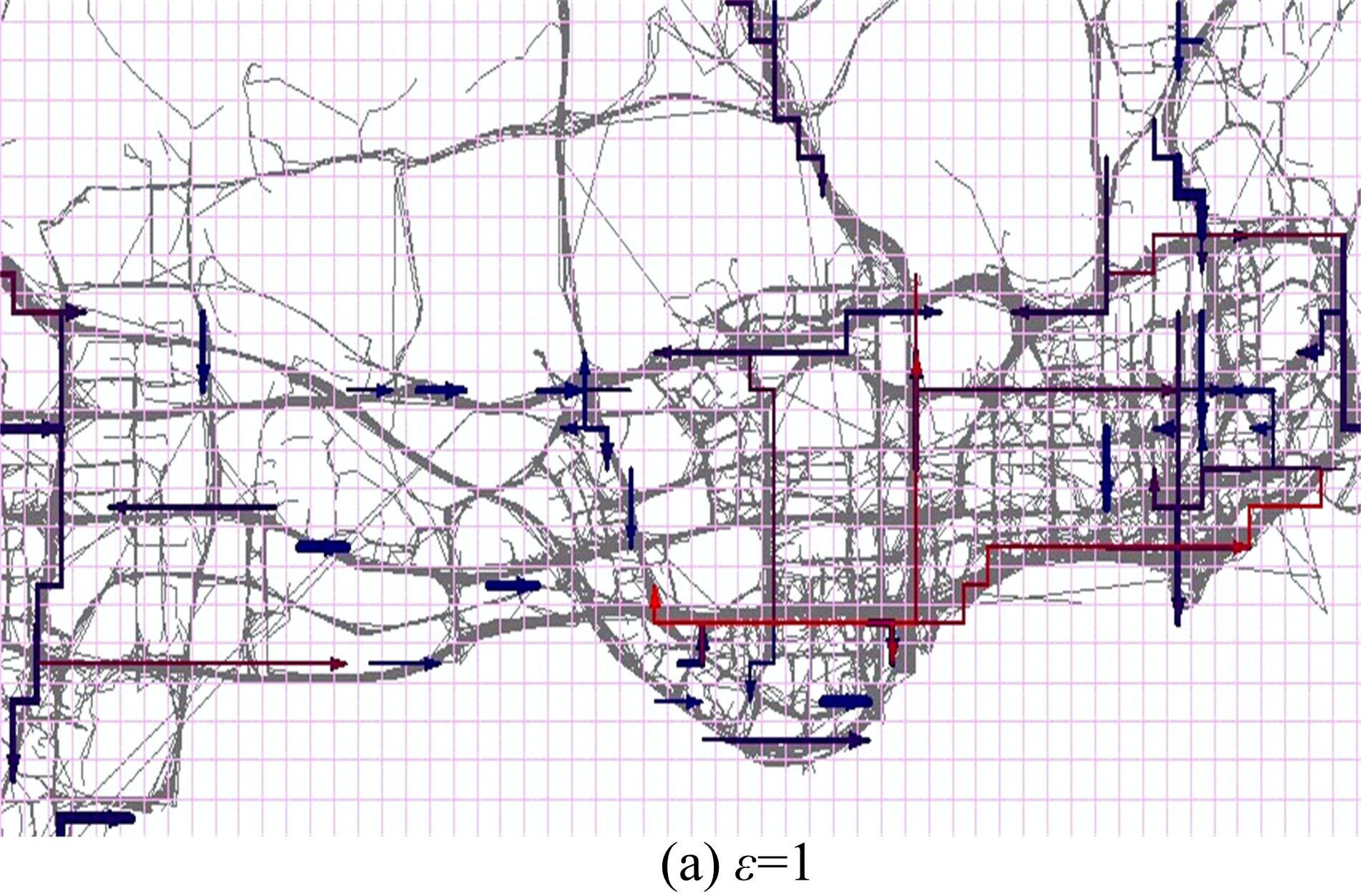
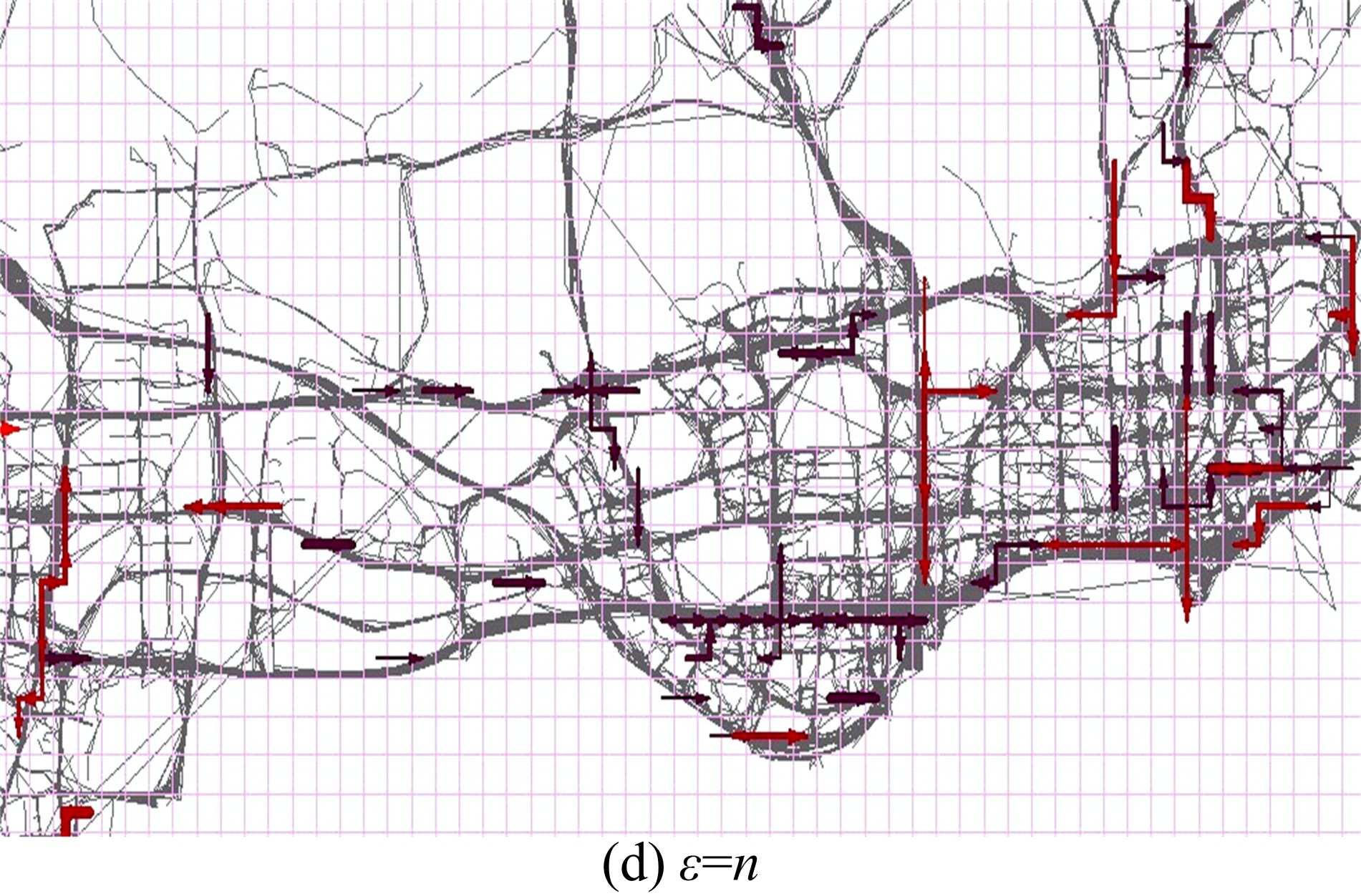
 | 图5 不同ε 值时的热点路径数量统计Fig.5 Statistics of hot routes for different ε values |
图5是 
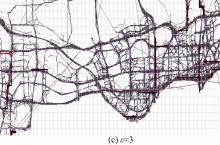
图6是 ε取以上值时的热点路径探测结果, 其中灰色曲线表示车辆轨迹, 彩色线段代表热点路径, 箭头表示路径方向, 线段越宽表示路径“ 热度” 越高, 颜色越红表示路径长度越长。从图中可以更清晰地看出ε =1时存在一些过长的“ 弱热点路径” , ε =2时识别的路径则分布比较均匀, ε =3时只识别出了很少的一部分短路径, 而ε =n时某些长路径被不合理地分割或截断了。
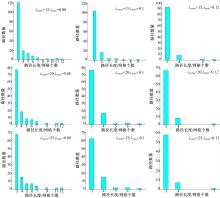
图7为对比不同λ 值时的结果, 取ε =2, m=100, n=50。观察图7可知, λ const与λ ratio值都会影响结果, 当λ const取较小值时(如λ const=15)会识别出大量短路径, 而当λ ratio取较大值时(如λ ratio=0.12)只会识别出极少的长路径。由图7还可以观察出, 当λ const由小变大时各类型路径的数量并没有太大变化, 而当λ ratio值由小变大时所识别出的长路径数量大幅下降, 由此可见实验结果对λ ratio值更敏感。实验表明, 当λ const=20~25, λ ratio=0.08~0.1时结果更符合实际情况, 当然这只是针对1 h的数据量而言, 它们的值应根据数据量的大小适当调整。限于篇幅这里不再讨论如何根据数据量来调整两个值的大小。
图8为不同网格数量对结果的影响, 此时取ε =2, λ const=25, λ ratio=0.08。由图8观察可知, 当网格数量为80× 40时所得的长路径数量最多, 随着网格数量的增加所得的长路径数量逐渐减少。这是因为随着网格变小, 邻接网格间的共同轨迹数量会变少, 这样就会造成很多邻接网格无法密度可达。这时若要保持三种情况下的结果相差不大, 就需对ε 和λ 的值进行调整。
 | 图7 不同λ 值时的热点路径数量统计Fig.7 Statistics of hot routes for different λ values |
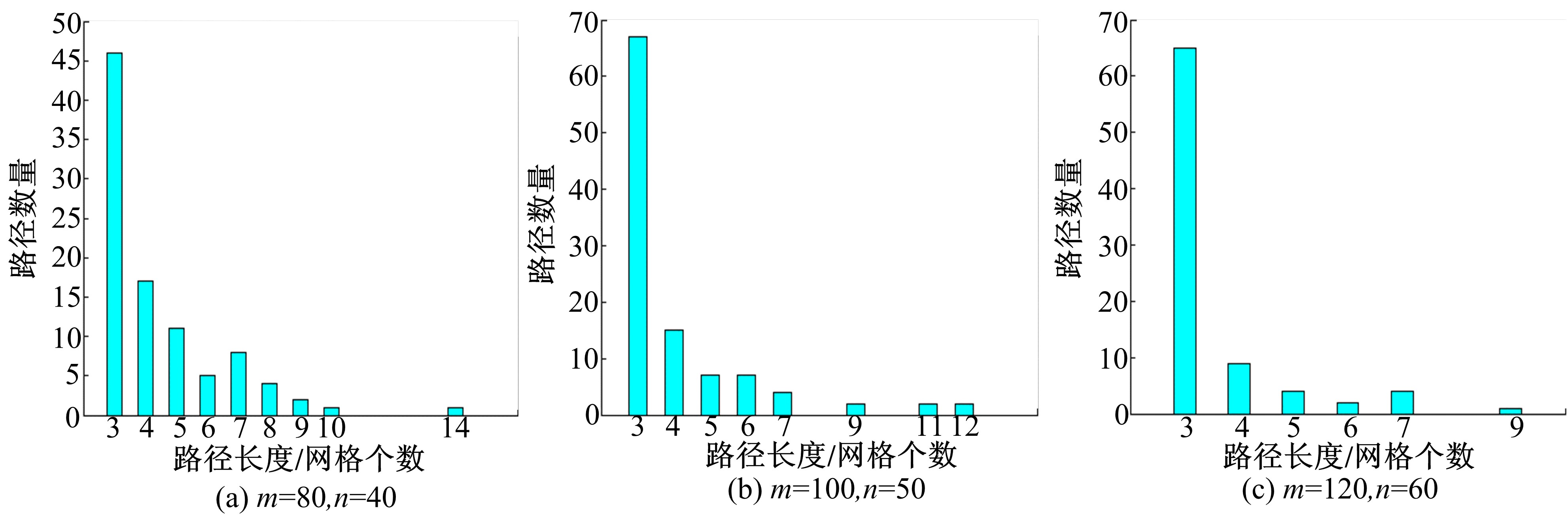 | 图8 不同网格数量时的热点路径数量统计Fig.8 Statistics of hot routes for different grid numbers |
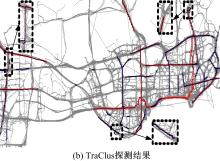
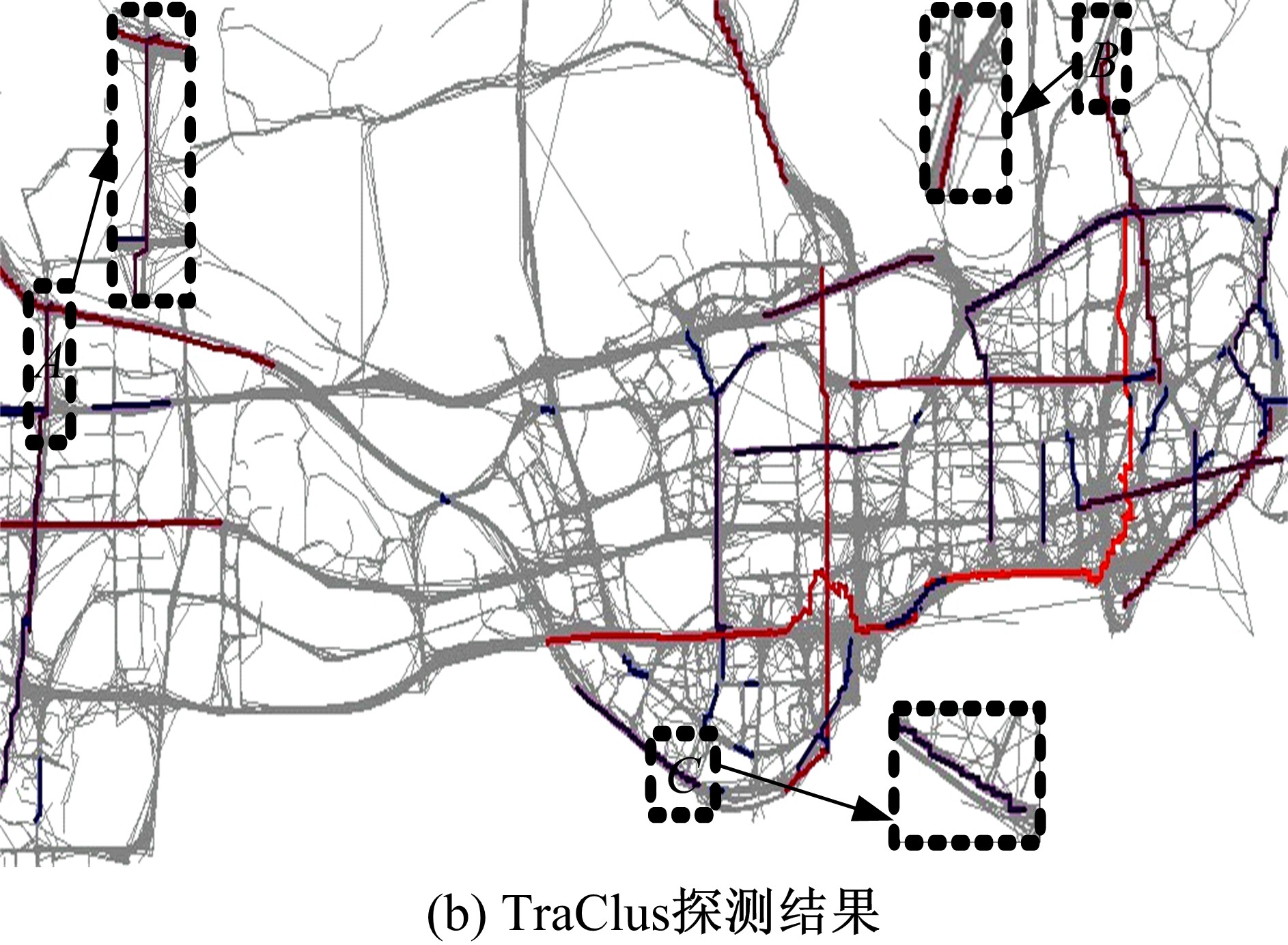
这里与经典轨迹聚类算法TraClus[5]进行对比, 如图9所示。
观察图9(a)可发现, 凡是轨迹密集的地方所识别出的热点路径也较多, 且所识别出的热点路径长度分布均匀, 这是符合实际情况的。观察图9(b)中的 

图9(b)显示的是TraClus算法所获得聚类的代表性轨迹(Representative trajectory), 由图可知该算法能够将具有相似性的轨迹聚类到一起, 能一定程度地表达轨迹的运动趋势, 但由于算法只考虑轨迹的相似性、不考虑路径间的轨迹连通性而导致聚类结果中存在一些超长聚类(> 8 km), 这种情况下的聚类结果就不能表示热点路径了。而且, TraClus算法也不能有效识别热点路径的耦合现象(对比图9(a)(b)中的 
通过以上对比可以看出, GridGrowth算法比TraClus算法能够更有效地识别热点路径。
本算法主要包括以下三个阶段:
(1)数据预处理:即将轨迹转化为网格序列, 这一过程主要是将各个GPS轨迹点分配到相应网格中, 每处理一个点需要 
(2)探测热点路径起始区域:这一过程只需逐一探测每个网格单元的邻接单元即可。若网格数量为 
(3)聚类:此阶段是要生成所有热点路径, 这一过程的时间复杂度跟热点路径起始区域的个数、路径长度、滑动窗口宽度以及网格单元内的车流量有关。假设起始区域的个数为 
本文提出了无路网支持条件下的热点路径探测方法, 并给出了问题的规范化定义和使用网格聚类探测热点路径的详细算法。最后给出了实验验证, 并与其他算法进行了对比。对比实验表明:GridGrowth算法在一定参数范围内能得到较稳定的探测结果, 且能很好地处理热点路径的复杂耦合现象。然而, 算法中λ const、λ ratio等参数的值虽对本实验环境有效, 当实验数据等条件发生变化时却未必能得到较优的结果, 所以进一步的研究可探索这些参数的自适应取值方法, 使得算法拥有更好的适应性。另外, 本文的实验结果只揭示了单一时间区间内的热点路径探测结果, 而并未对不同时间段、不同时间区间的实验结果做深入分析, 下一步的工作也可进行这方面的研究。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|