
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于高斯混合模型的驾驶员个人特质辨识
引用本文
吴坚, 姚琳琳, 朱冰, 邓伟文. 基于高斯混合模型的驾驶员个人特质辨识. 45(1): 38-43
WU Jian, YAO Lin-lin, ZHU Bing, DENG Wei-wen. Identification of driver individualities using Gaussian mixture model. Journal of Jilin University Engineering and Technology Edition, 45(1): 38-43
Permissions
WU Jian, YAO Lin-lin, ZHU Bing, DENG Wei-wen. Identification of driver individualities using Gaussian mixture model. Journal of Jilin University Engineering and Technology Edition, 45(1): 38-43
Copyright©2015, 吉林大学学报编辑部
版权所有.吉林大学学报编辑部
基于高斯混合模型的驾驶员个人特质辨识
作者简介:吴坚(1977-),男,副教授,博士.研究方向:汽车地面系统分析与控制.E-mail:wujian@jlu.edu.cn
摘要
为实现不同类型驾驶员个人特质辨识,基于dSPACE实时仿真平台搭建了驾驶员使用模式信息采集系统,对30名被测驾驶员在典型工况下的使用模式进行了信息采集;采用高斯混合模型建立了驾驶员个人特质辨识模型,选取三类典型驾驶员模本对模型进行了参数训练;利用得到的优化参数对测试驾驶员进行了个人特质类型识别测试,并应用试验设计方法对辨识方法进行了优化分析。测试结果表明,提出的基于高斯混合模型的驾驶员个人特质辨识方法能够有效辨识驾驶员类型。
关键词:
车辆工程; 特征辨识; 高斯混合模型; 驾驶员个人特质
中图分类号:U471.3
文献标志码:A
文章编号:1671-5497(2015)01-0038-06
Identification of driver individualities using Gaussian mixture model
Abstract
In order to identify different types of driver individualities, a driver behavior signal acquisition system was developed using the dSPACE real-time simulation platform. The signals of driving behaviors of 30 drivers were collected under the test condition of double lane change. An identification model of driver individualities was proposed using Gaussian mixture model. Three kinds of typical standard drivers were chosen to optimize the model parameters. Identification experiments were carried out with testing drivers using the optimized model, and the Design of Experiment (DOE) method was applied to analyze the identification method. Experiment results show that the proposed identification method based on Gaussian mixture model can effectively identify the drivers' individualities.
Keyword:
vehicle engineering; characteristic identification; Gaussian mixture model; driver individualities
引言
为了寻找减少交通事故伤害的途径, 研究人员首先从车辆本身和道路交通环境方面进行了改进, 各种汽车主动安全控制系统和智能交通系统不断问世并得到广泛应用[1, 2, 3]。这些系统给驾驶员减轻了一定的负担, 同时也在一定程度上减少了由于驾驶员疏忽而引起的意外交通事故。但这些系统大都是均一设计, 没有考虑到驾驶员的个性差异对控制系统的影响, 因此, 还不能充分发挥效能, 甚至在某些特殊条件下, 控制系统由于无法适应驾驶员的个性特质, 还会产生适得其反的作用。因此, 开展个性化汽车控制系统设计已成为未来汽车电控领域的发展趋势[4, 5]。越来越多的研究人员开始关注驾驶员在人-车-环境闭环系统中的重要影响。美国密歇根大学Macadam详细分析了驾驶员的生理极限和物理特性, 以此为基础建立了驾驶员纵向、侧向控制模型[6]。日本学者在进行直接横摆力矩控制时, 引入了驾驶员意图识别进行系统设计, 提高了控制系统性能[7]。文献[8]将驾驶员特征信号采集引入到主动控制系统设计中, 进一步提高了车辆舒适性和安全性。
要实现汽车控制系统的个性化设计, 一个最重要的前提就是要能实现驾驶员个人特质的辨识。所谓个人特质, 是指一个人相对稳定的内在行为倾向, 它是个人心理思维和行为模式的综合体。不同个体间特质差异明显, 甚至没有两个人会有完全相同的特质, 这是因为每个人对环境的经验和反映都是不同的[9, 10]。为简化研究, 本文选取对主动安全控制系统设计影响较为重要的驾驶经验来区分驾驶员个人特质, 将驾驶员分为熟练型、一般型和新手型。相关研究表明, 这几种类型的驾驶员对控制系统需求及参数敏感性差异最为明显[11]。
本文基于dSPACE实时仿真平台构建信息采集系统, 进行驾驶员使用模式信息采集试验, 并通过高斯混合模型(Gaussian mixture model, GMM)建立驾驶员个人特质辨识模型, 对实验数据进行分析和辨识, 实现对驾驶员个人特质的分类。
1 驾驶员使用模式信息采集
1.1 驾驶员使用模式信息采集系统
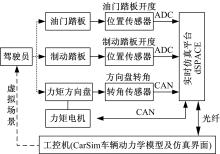
为辨识驾驶员个人特质, 需采集有关信号并分析驾驶员使用模式。常规使用条件下驾驶员的个人特质差别不大, 很难进行区分; 只有在极限工况下, 才最能体现出不同驾驶员的个人特质。为保证实验的安全性和可重复性, 本文基于dSPACE实时仿真平台搭建了驾驶员使用模式信息采集系统, 如图1所示。
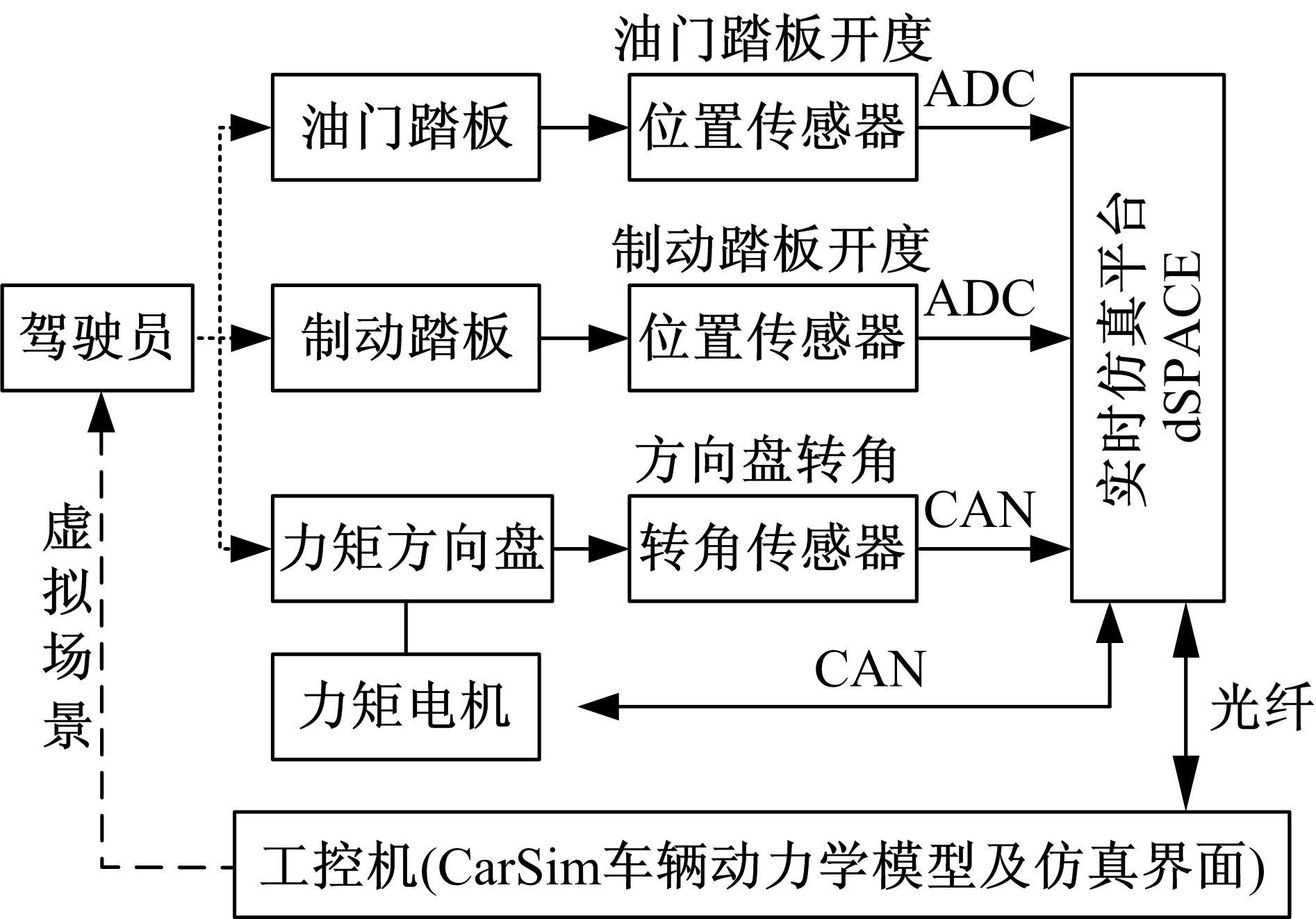 | 图1 驾驶员使用模式信息采集系统Fig.1 Driver behavior signals acquisition system |
该信息采集系统为动态虚拟仿真系统, 采用dSPACE DS1103控制板作为实时仿真处理器, 实时采集油门踏板开度、制动踏板开度、方向盘转角等驾驶员使用模式信息, dSPACE系统采样频率为1 kHz, 通过光纤与工控机相连, 将信息反馈给CarSim车辆动力学模型, 由CarSim软件产生动态虚拟场景, 帮助驾驶员在虚拟环境下进行驾驶模拟。
为增加驾驶员的驾驶体验感, 系统中的方向盘选用德国SENSODRIVE公司SD-LC型力矩方向盘。力矩方向盘具有可调节的阻尼、摩擦等参数, 能模拟真实路况的力矩反馈, 具有良好的路感。其通过CAN总线实现方向盘与主机之间的信息传递, CAN信号的传输速率为500 kbit/s, 当驾驶员转动方向盘时, 采集转向信息, 并控制电机产生期望转矩, 使驾驶员感受到逼真的路感信息。
采集系统中油门踏板采用电子油门, 通过位置传感器采集、标定后直接计算期望油门踏板开度。而制动踏板信息则通过踏板转角传感器测量。这两路传感器都接入DS1103的模拟量采集通道ADC。
1.2 驾驶员使用模式信息采集试验
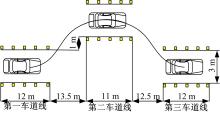
为充分体现驾驶员个人特质差异, 选取紧急双移线工况进行驾驶员使用模式信息采集, 工况理想轨迹如图2所示。
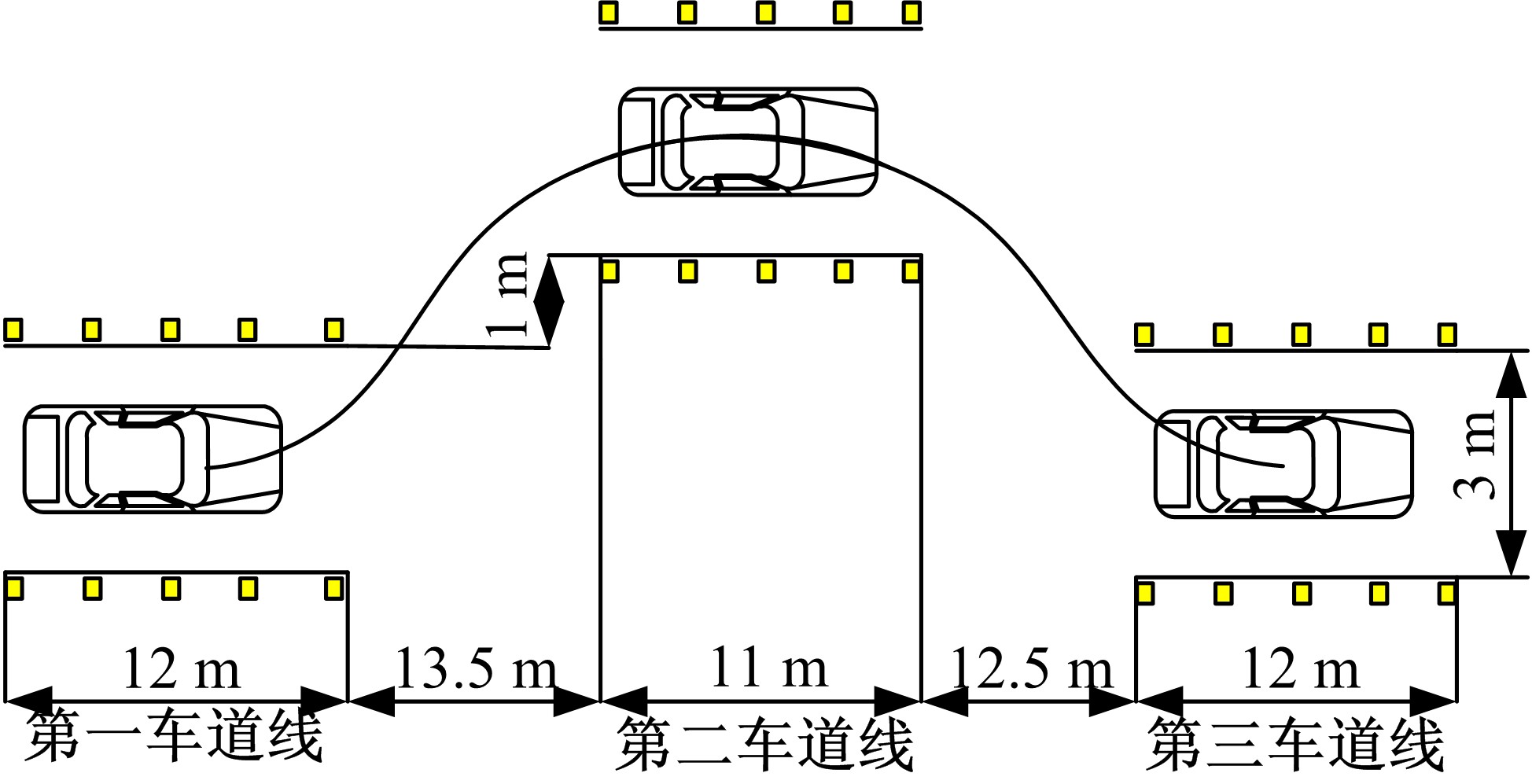 | 图2 驾驶员使用模式信息采集工况Fig.2 Condition used in driver behavior signals acquisition system |
信息采集时, 每个驾驶员从同一起点加速至第一车道线处, 令车速超过110 km/h, 进行移线操作, 待车辆驶出第三车道线后立即进行制动停车。
为保证实验数据可信, 本文选取30名驾驶员进行使用模式信息采集, 其中, 男女比例为2∶ 1; 按照实际驾龄长短及驾驶熟练程度选择的熟练型驾驶员、一般型驾驶员和新手型驾驶员各占三分之一。
实验开始前, 每名被测驾驶员均需接受培训, 使其充分熟悉动态模拟信息采集系统, 并能够进行熟练操作, 尽量回归其真实驾车状态。
实验采集的典型驾驶员使用模式信息数据示例如图3所示, 分别包括油门踏板开度、制动踏板开度、方向盘转角、车速等信息。
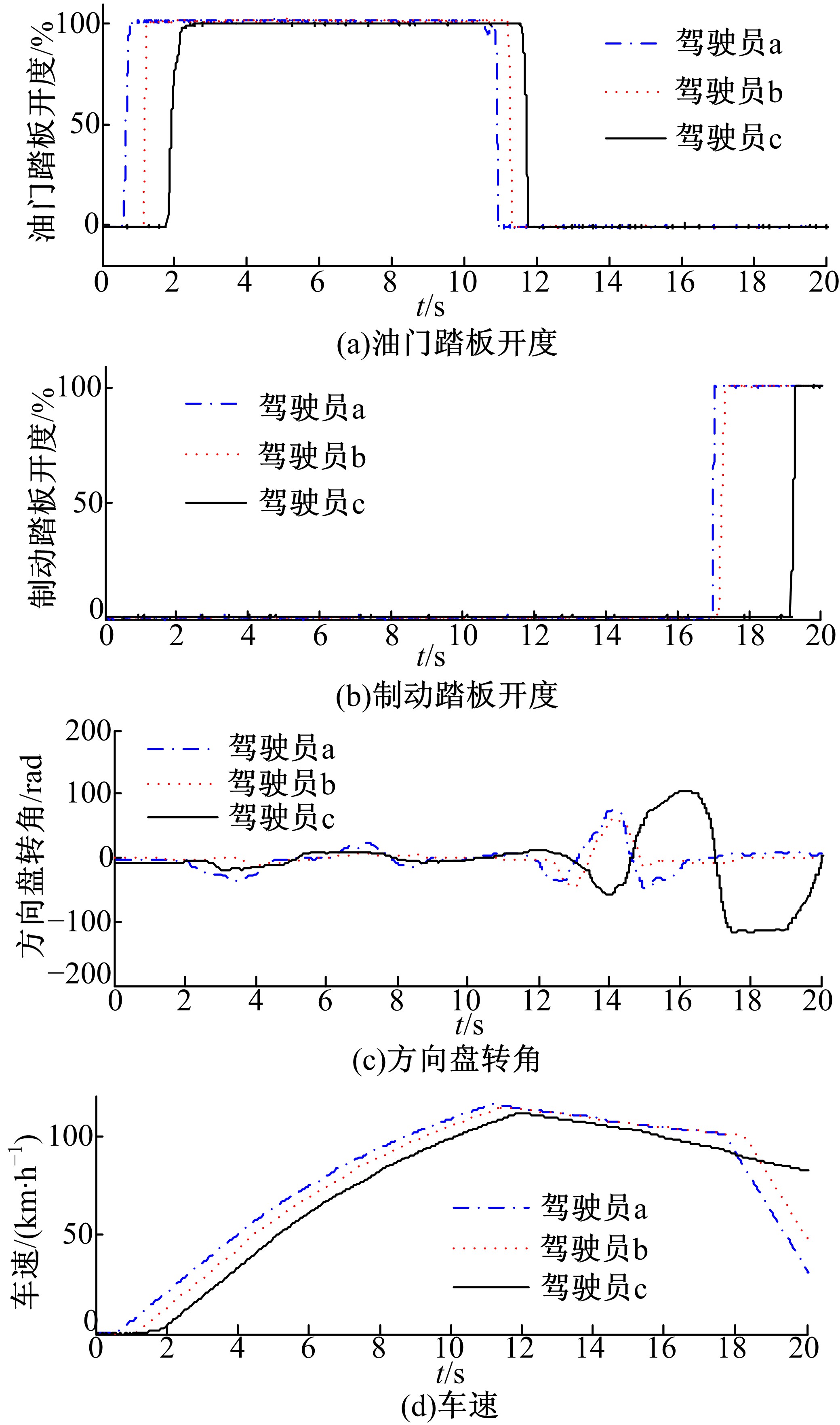 | 图3 部分实验采集数据Fig.3 Parts of acquisition data |
2 基于GMM的驾驶员特质辨识模型
2.1 驾驶员个人特质GMM辨识模型
由图3可见, 对于具有不同个人特质的驾驶员, 其控制方向盘转角的信息差异最为显著。因此, 本文选取驾驶员方向盘转角输入对不同驾驶员个人特质进行辨识。
为准确辨识不同个人特质的驾驶员, 本文引入高斯混合模型GMM建立驾驶员特质辨识模型。高斯混合模型能够较为精确地量化信号分布特征, 将某一事物分解为多个基于高斯概率密度函数组成的模型, 因此, 被广泛应用于语音识别、图像语义特征提取等领域[12, 13]。对于驾驶员的分类识别, 高斯混合模型不仅能够准确地分析预测驾驶员个人特质信息, 而且识别过程清晰, 结果易于理解。
高斯混合模型是单一高斯概率密度函数的延伸, 由多个单一高斯模型组成。其中单一高斯模型概率密度函数为:
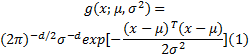
式中:x为随机向量; μ 为均值向量; σ 为方差矩阵; d为随机向量维数。
混合高斯概率密度函数为:

式中:xj为第j个随机向量; μ j为第j个单一高斯模型的均值向量; σ j为第j个单一高斯模型的方差矩阵; aj为混合权重。
显然, 在GMM中, 主要参数为单一高斯模型在GMM中的混合权重以及GMM的均值和方差。为了获取最佳参数, 使用了最大期望值(Expectation maximization, EM)迭代法, 即根据选取的初值, 通过EM循环迭代来得到新的参数。
本文选取驾驶员输入的方向盘转角作为一维向量x, 带入到下列迭代公式中以获取新的模型参数。
式中:n为随机向量的个数。
β j(x)称为后概率事件, 即表示观测到的方向盘转角信号是由第j个高斯密度函数产生的概率。
式中:M为单一高斯模型个数。
2.2 驾驶员个人特质GMM辨识模型的训练
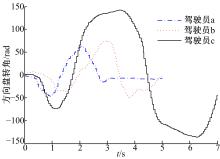
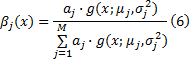
为精确辨识不同个人特质的驾驶员属性, 本文按照分类标准在熟练型、一般型和新手型这三类驾驶员中各选取一名最具代表性的驾驶员作为训练模本, 这三名驾驶员在实验工况中的典型方向盘信号如图4所示, 图中, a、b、c分别代表熟练型驾驶员、一般型驾驶员和新手型驾驶员。
 | 图4 模本驾驶员典型方向盘转角信号Fig.4 Typical steering wheel inputs of model drivers |
由图4可见, 熟练型驾驶员在移线工况时反应比较迅速, 过渡比较平缓, 能够很好地操纵车辆实现移线。而对于新手型驾驶员, 转向盘转角过大, 不能及时回正方向盘, 在较高的车速下车辆极易失去稳定性, 具有非常高的危险性。而一般型驾驶员的驾驶操作则介于两者之间。因此, 对于新手型驾驶员, 在设计主动安全控制系统时, 就要求提高系统响应速度, 使控制系统尽早干预, 保证车辆的操纵稳定性; 而对于熟练型驾驶员, 可以适当降低控制系统的干预程度, 提高驾驶员自主操纵的乐趣。
利用模本驾驶员的典型方向盘转角信号对GMM模型进行训练, 训练流程为:确定GMM模型阶数, 设定初始化参数; 进行EM迭代; 如果使得似然函数值达到最大, 则输出最优参数, 训练结束; 否则, 返回EM迭代。
为了尽量减少模型迭代次数且使其最终趋近于收敛状态, 迭代初始值的选取非常重要。本文将方向盘转角信号训练数据分成M段, 分别计算每段数据的均值和方差, 将1/M做为混合权重, 以此来作为GMM辨识模型迭代的初始值。为了使高斯混合模型所拟合信号的密度分布最为精确, 即最能反映驾驶员的个人特质, 最优参数所要达到的结果是使高斯混合模型的似然函数值达到最大, 即似然函数值越大, 代表所用的高斯混合模型模拟的驾驶员方向盘转角信号越接近真实信号分布情况。
本文采用对数似然函数来表示高斯混合模型模拟方向盘转角信号的近似度, 所使用的对数似然函数为:

式中:J(θ )为对数似然函数; p(xi)为第i个单一高斯模型的概率密度。
迭代计算后得到模本驾驶员最优参数如表1所示。
| 表1 模本驾驶员最优参数 Table 1 Optimal parameters for model drivers |
3 驾驶员个人特质辨识与分析
3.1 驾驶员个人特质辨识
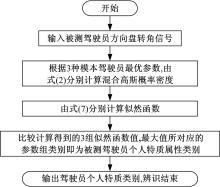
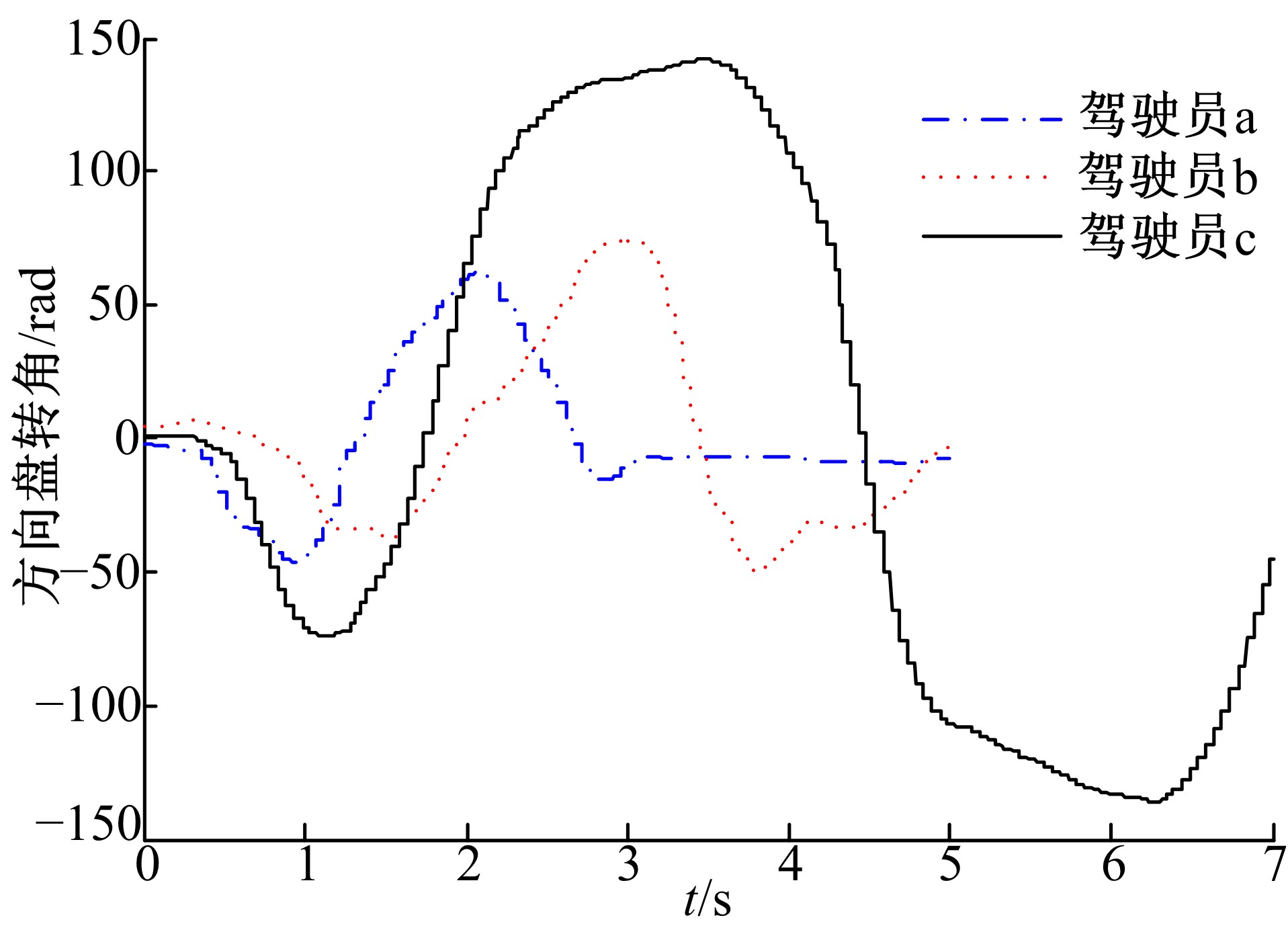
利用上述得到的驾驶员个人特质GMM辨识模型对被测驾驶员的个人特质进行辨识, 流程如图5所示。
 | 图5 驾驶员个人特质辨识流程图Fig.5 Flow chart of driver individualities identification |
辨识的基本思想是利用三组不同个人特质类型的模本驾驶员最优参数, 计算被测驾驶员的似然函数, 使似然函数值达到最大值的最优参数对应的驾驶员个人特质类别即是该被测驾驶员的所属类别。
根据图5所示流程, 计算得到3个随机被测驾驶员的似然函数值如表2所示。由表2可见, 对于被测驾驶员X, 利用熟练型驾驶员参数计算得到的似然函数值最大, 因此, 辨识驾驶员X为熟练型驾驶员; 同理, 可以辨识驾驶员Y为一般型驾驶员; 驾驶员Z为新手型驾驶员。
| 表2 随机被测驾驶员的似然函数值 Table 2 Likelihood of random test drivers |
3.2 驾驶员个人特质辨识方法分析
为提高辨识效率, 对影响辨识效果的主要因素进行试验优化分析。
应用试验优化设计方法(Design of experiment, DOE)对影响辨识实验的3个主要因素建立L4(23)正交表, 如表3所示, 选取的3个主要因素分别为混合模型中单一高斯模型的个数(M值)、训练数据的长度和辨识使用的数据段数。
| 表3 正交试验因素水平表 Table 3 Factor-level table of orthogonal experiment |
正交试验结果如表4所示, 可见, 第二次试验的识别率最高, 即选用A1B2C2对驾驶员个人特质进行辨识的识别率最高, 可以达到91.7%。
| 表4 正交试验结果 Table 4 Results for orthogonal experiment |
4 结束语
对驾驶员个人特质进行辨识是设计个性化汽车控制系统的前提。本文基于dSPACE实时仿真平台搭建了驾驶员使用模式信息采集系统, 对典型驾驶员使用模式进行了信息采集; 引入高斯混合模型建立了驾驶员个人特质辨识模型, 并选取3类典型驾驶员模本对模型进行了参数训练; 利用训练好的驾驶员个人特质辨识模型对被测驾驶员的个人特质进行了辨识, 并应用试验设计方法对辨识方法进行了优化分析; 试验结果证明, 本文提出的基于混合高斯模型的驾驶员个人特质辨识方法能够有效辨识驾驶员类型。本文内容是进行个性化汽车控制系统设计的基础研究, 通过对不同类型驾驶员使用模式的分析和辨识, 可以有针对性地调节控制系统参数, 使汽车电子控制系统适应不同水平驾驶员的驾驶习惯, 最大程度地满足不同驾驶员的个性需求, 提高驾驶安全性和驾驶乐趣。
The authors have declared that no competing interests exist.
参考文献
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|