






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
信号交叉口左转车干扰下的行人过街特性
[陈永恒 , 尉明丽, 曲昭伟, 张虎, 曹宁博]
, 尉明丽, 曲昭伟, 张虎, 曹宁博]
, 尉明丽, 曲昭伟, 张虎, 曹宁博]
|
|


作者简介:陈永恒(1978-),男,副教授,博士.研究方向:交通控制及交通组织.E-mail:cyh@jlu.edu.cn
针对无专用左转相位情况,研究了人行横道处左转车干扰下的行人过街特性,采用视频图像处理技术对行人过街过程的全时空信息进行提取,分析了行人过街过程中受到干扰后的轨迹和速度等参数的变化规律。在此基础上,将左转机动车干扰下出现的典型行人过街行为归类,分析左转机动车及绿灯时间共同作用下的行人过街特性,最后统计由于左转机动车对行人过街行为刺激而导致的行人干扰延误值变化状况,研究成果可为交叉口行人过街的信号配时和左转相位的设置等提供依据。
For un-dedicated left-turn phase intersections, the pedestrians' crossing characteristics were analyzed under the influence of left-turn vehicles at the crosswalk. The spatiotemporal information of the pedestrians crossing the road is obtained by video image processing technology; then their crossing trajectory and speed are analyzed. The typical pedestrians' behaviors are classified. Under different interference degree of left-turn vehicle and green light time, the pedestrians' characteristics are analyzed. The pedestrians' delay at the crosswalk due the influence of left-turn vehicle is statistically counted. The results may provide reference for signal timing and left-turn vehicle phase setting at the intersections.
机动车与行人冲突下的行人过街特性研究可以分为以下三个方面:数据调查方面, Lars Leden[1]等采集约300个交叉口数据对行人过街安全评估参数开展研究, 得出左转机动车对行人威胁系数高于右转机动车。张会、景超等[2, 3]统计行人过街特征参量变化规律, 得到信号交叉口行人群在有限弹性空间内的微观特性。仿真模拟方面, Ishaque[4]等人利用仿真软件通过设置不同信号配时、机动车类型与交通流量, 从系统延误角度考虑左转机动车对行人受到干扰影响。冲突机理建模方面, 杨佩昆[5]、戴彤宇[6]等人研究信号控制交叉口行人过街延误中的车流干扰延误, 通过实际交叉口的案例得到干扰延误值, 确定行人过街设施服务水平。徐良杰[7]、冯树民[8]等人通过分析行人与左转机动车的相互干扰机理及其带来的影响, 建立了行人-机动车通过冲突区域时的干扰延误模型。另外, 较为常用的信号交叉口行人延误计算方法是HCM算法, 其采用的单项指标评价体系具有较强的可操作性, 但该算法并未考虑行人受同相位左、右转机动车流干扰所导致的延误, 没有体现左转机动车干扰下的延误变化。
上述研究成果, 在一定程度上促进了行人与左转机动车冲突的理论研究, 但是缺乏对行人过街全过程时空信息的反映, 没有真实、全面地再现行人过街行为的复杂规律。本研究在上述研究成果的基础上, 运用视频处理技术跟踪全时空序列下行人的过街行为, 分析左转机动车不同干扰程度下行人的运行轨迹变化、行人运行速度变化以及行人干扰延误等过街特性, 得到左转机动车影响下的干扰延误值, 结论可为更加有效和精确的行人过街时间计算以及左转相位设置提供理论依据。
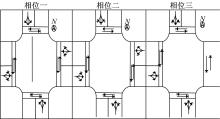
针对上述现象进行数据采集, 其中数据选取遵循以下原则:①无专用左转相位, 但具有左转车道的信号交叉口; ②行人在过街时受左转车辆的影响较大, 基本不受其他因素干扰; ③出口车道数至少要有2条或以上; ④释放的左转车辆不受非机动车过街影响, 或非机动车较少的状况; ⑤释放左转车辆不受上一相位对向滞留直行车的影响; ⑥剔除由于左转车辆在交叉口内变道超车造成交通混乱的数据, 以此保证行人过街各参数具有较高的合理性、可靠性。根据上述原则, 选取长春市自由大路与同志街(交叉口1)、延安大路与重庆路(交叉口2)两个三相位交叉口进行视频观测, 运用吉林大学自主开发的Tracpro软件进行交通流全时空信息采集, 主要包括坐标、位移、时间以及点速度等。同时记录了交叉口几何条件及信号配时参数, 分别如图1和表1所示。
 | 图1 调查地点的相位示意图Fig.1 Phase diagram of survey sites |
| 表1 调查地点的参数统计表 Table 1 Parameter statistics of survey sites |
文中数据采集时段均为平峰时段, 原因在于高峰时段行人密度过大, 行人的特征跟踪点容易被遮挡, 导致误差增大; 同时在高峰时段, 由于行人流量过大, 可能导致拥堵甚至混乱现象出现, 无法反映行人与左转机动车相互干扰的正常行为。
 | 图2 数据采集过程Fig.2 Schematic diagram of the data collection process |
现以交叉口1为例, 说明数据的具体采集步骤。图2(a)为交叉口视频拍摄场景; (b)为标定过程实现视频得到的帧图像像素坐标到大地坐标的转化过程, 得到大地坐标系中行人的坐标; (c)为利用视频处理技术按照时空序列对行人过街数据的提取, 得到行人的点速度、轨迹分布、过街时间、位移等参数; (d)为以人行横道上左上角为原点建立坐标系, 通过上述采集、标定、跟踪、分析四步骤实现对左转相位干扰下的行人过街行为全时空信息提取。
2.1.1 不同干扰程度下的行人过街速度分析
行人在过街的过程中, 首先会观察是否有左转车辆到达, 根据是否符合通过条件进行决策。可按照行人在人行横道处是否受左转车辆干扰及受干扰后不同表现行为分类:①无干扰状况:行人在左转机动车未达到冲突点或者是左转机动车空放时, 行人顺利地通过交叉口, 此时机动车对行人的干扰可忽略; ②有干扰状况又分为两种情况:ⓐ适时通过:恰好机动车流中出现可穿越间隙, 行人无需等待较小; ⓑ等待通过:等待机动车辆减速、停住或等待到车流中出现可穿越间隔后, 选择适当的间隙过街。
通过视频处理技术对上述三种行人的微观行为作分析, 为排除其他因素的干扰, 此处研究受其他因素影响较小的行人样本。针对观测时段内的1148个样本量, 选取速度波动较为明显的样本得到图3, 其横轴表示人行横道的长度, 纵轴表示在相应坐标点的行人点速度。图3表明无干扰状态下行人过街速度较为平稳, 适时穿越过街的平均速度值明显高于无干扰状态, 等待通过方式下行人出现明显的减速等待特性。针对上述不同过街行为的行人过街速度作分析, 同时剔除个别因素造成的特例行人行为特征, 得到速度波动状况及行人在冲突区域的行驶的平均步行速度如表2。
| 表2 无干扰及有干扰行人的点速度特征 Table 2 Speed characteristics of non-interference and interference pedestrians |
左转机动车与人行横道的交汇处形成冲突区域, 在冲突区域内的平均速度为样本在冲突区域内点速度的平均值, 计算如下:

式中:n为行人进入干扰区域第一个轨迹点; m为行人驶出干扰区域的最后一个轨迹点; vn 为n点对应的速度; vm 为m点对应的速度。
 | 图3 交叉口1、交叉口2有干扰及 无干扰下的行人过街速度波动图(a)交叉口1Fig.3 Speed fluctuation figures of the pedestrian interference and non-interference in the intersection one and two |
 | 图3 交叉口1、交叉口2有干扰及 无干扰下的行人过街速度波动图(b)交叉口2Fig.3 Speed fluctuation figures of the pedestrian interference and non-interference in the intersection one and two |
表2表明在不同的通过方式下, 行人的速度波动不同, 实验中等待穿越的速度波动明显比其他两种行人过街的速度波动大。同时针对交叉口调研得到行人过街特性包括多种因素的共同作用, 尤其是等待直到绿灯末期时变化较为明显, 为此, 分析行人在受到干扰同时受到绿灯时间作用的变化特性。
2.1.2 行人在绿灯不同时段的过街速度比较
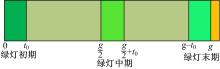
行人在通过人行横道的过程中, 不仅受到左转机动车的干扰, 还与绿灯时间有密切的关系。在干扰区, 绿灯时段不同使得行人在绿灯信号启亮、绿灯时间过半及绿尾间时段受干扰的微观行为也有所差异, 现选取三个时间段, 如图4。
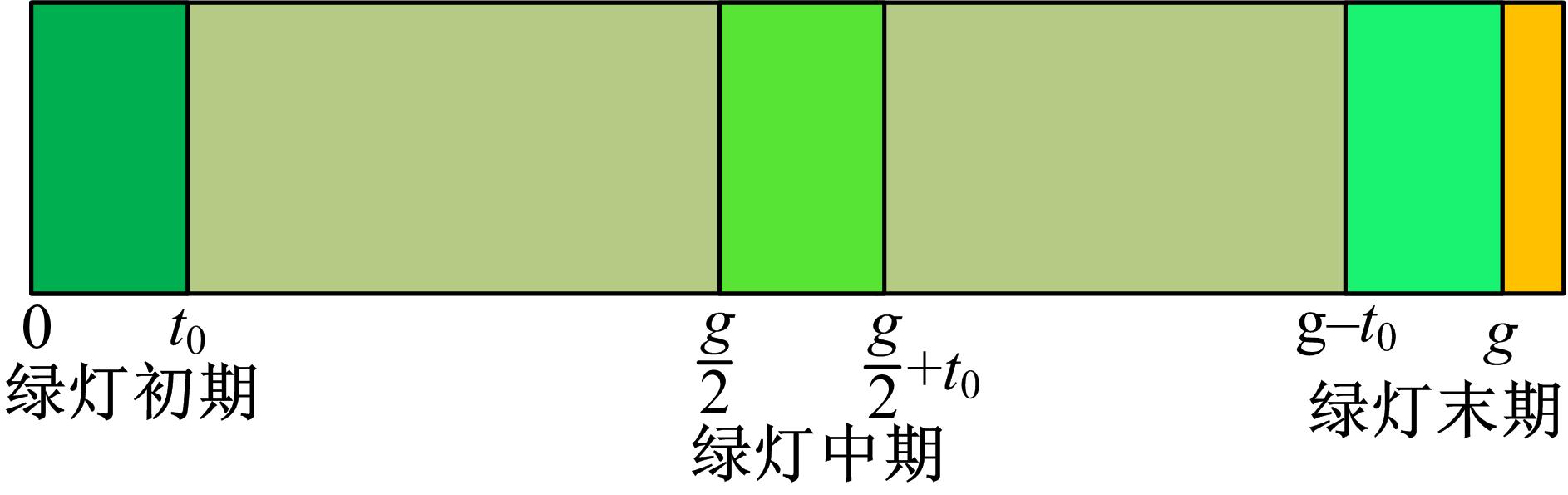 | 图4 绿灯时段划分图Fig.4 Schematic of green division |
设干扰区域前行的等待点到对面人行横道线处的距离为L, 此时行人刚到达此处, 有左转机动车通行且不存在行人可通过的间隙, 统计无干扰状态下行人样本量为400, 通过人行横道花费的平均时间为:

式中: 

通过视频数据观测不同绿灯信号期间行人受到左转机动车干扰的步行速度列于表3。
| 表3 行人在绿灯不同时段的过街点速度比较 Table 3 The comparison of the interference pedestrians' speed at different green time |
统计数据显示, 绿灯启亮时, 过街人群中前排的行人有充分时间过街, 按自己认为可以安全过街的步行速度过街, 即使受到左转机动车的阻滞作用, 速度也明显增大。绿灯中期行人已经开始产生时间上的紧迫感, 特别是在左转机动车的干扰下会以稍微快的速度通过。在绿灯末期, 行人由于左转机动车阻滞等待时间较长或者是到达时间较晚, 直到在绿灯末期才有机会找到穿越间隙通过交叉口, 到达人行横道的行人会以较快的步行速度过街, 甚至以小跑的速度过街, 致使速度明显加快, 说明绿灯时间的变化与左转机动车共同影响行人过街特性。
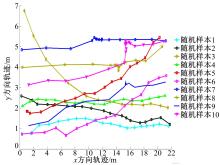
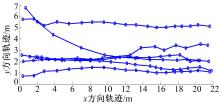
在微观变化的基础上, 由于左转机动车的阻滞与绿灯时间的共同作用, 伴随着行人过街特征的宏观变化, 具体表现为运行轨迹也随之改变, 跟踪行人全时空信息的轨迹变化状况如图5所示。
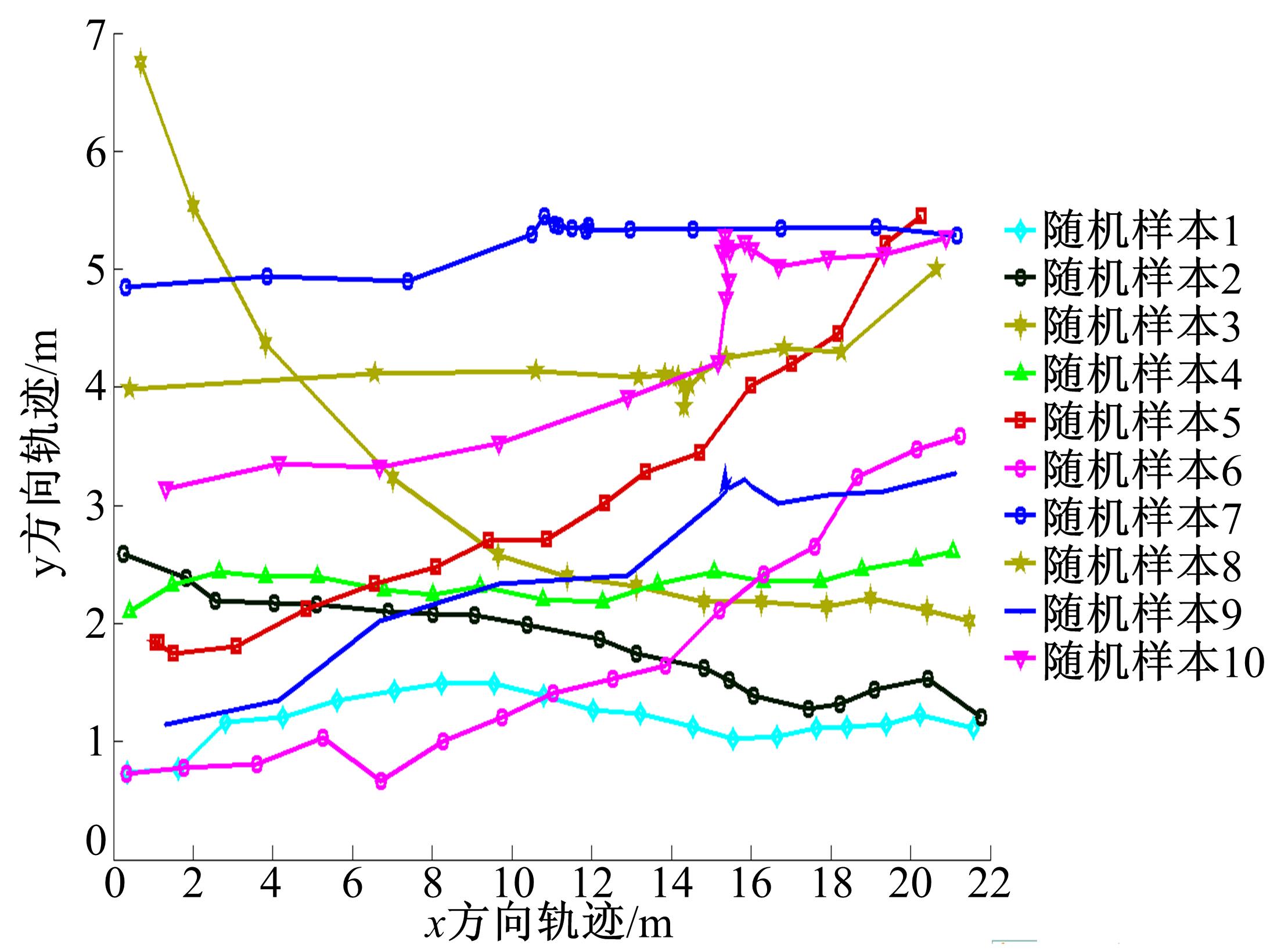 | 图5 交叉口1及交叉口2随机行人轨迹示意图(a)交叉口1Fig.5 Stochastic pedestrian path diagram in the intersection one and two |
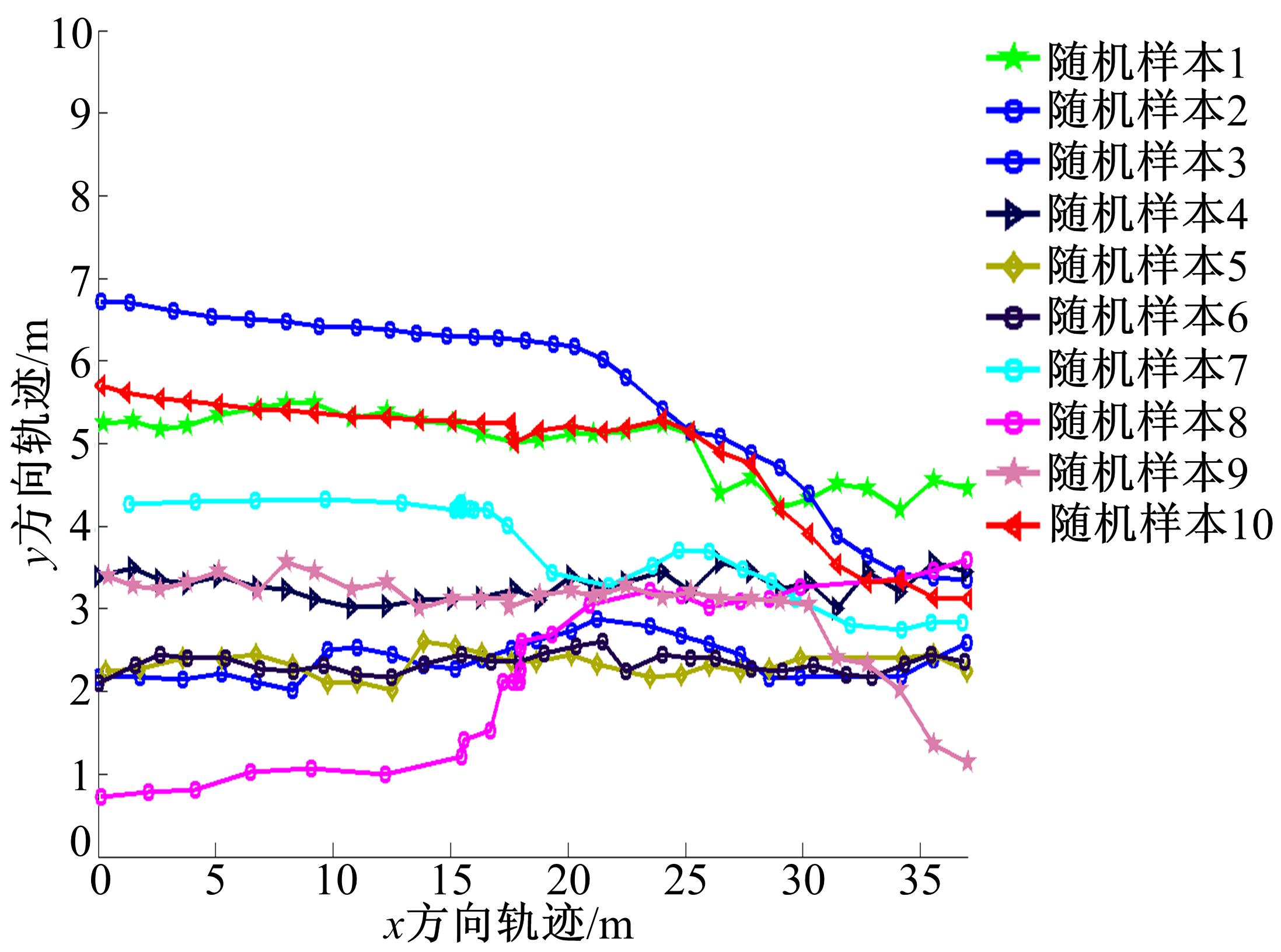 | 图5 交叉口1及交叉口2随机行人轨迹示意图(b)交叉口2Fig.5 Stochastic pedestrian path diagram in the intersection one and two |
为分析左转机动车对行人过街轨迹的影响, 以交叉口1为例, 选取无干扰状况、适时通过及等待通过样本量分别为400、323、425轨迹作分析, 选取较为典型的行人过街轨迹的变化示意见图6。
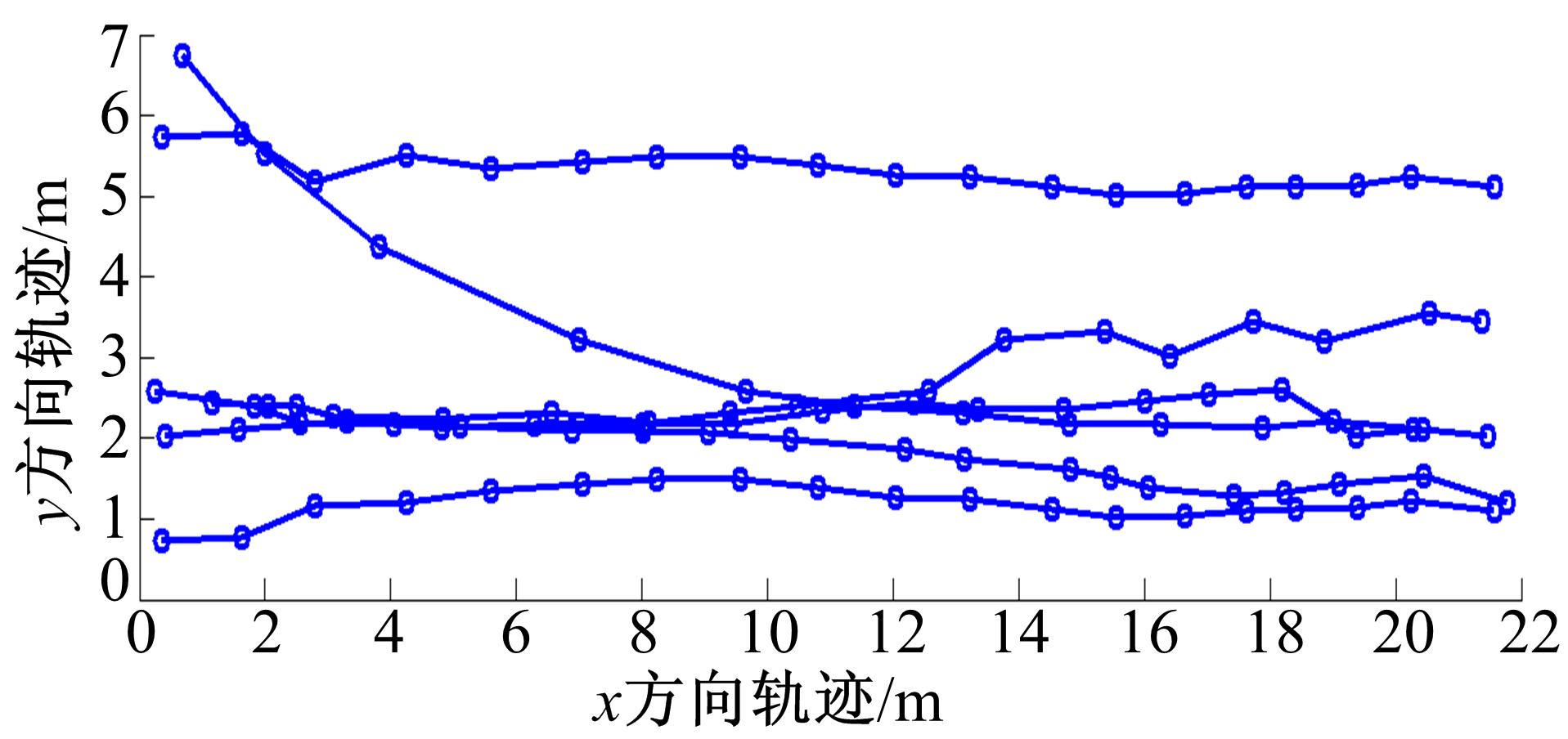 | 图6 无干扰及有干扰的行人轨迹示意图(a)无干扰状况Fig.6 Trajectory schematic of interference and non-interference pedestrians |
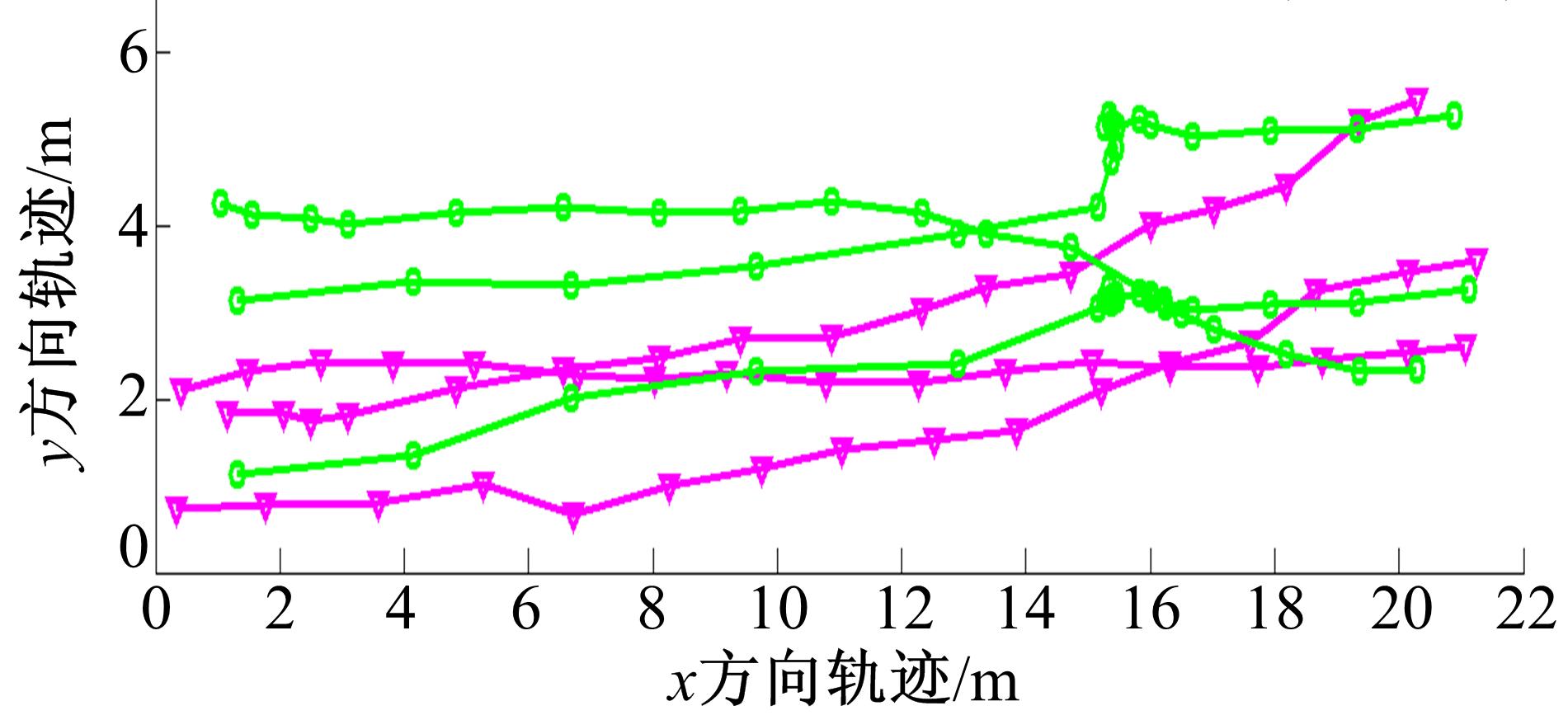 | 图6 无干扰及有干扰的行人轨迹示意图(b)有干扰状况Fig.6 Trajectory schematic of interference and non-interference pedestrians |
图6说明由于左转机动车的阻滞使得在受干扰的状况下, 行人的过街轨迹点密集程度发生变化, 即轨迹点疏密度和分布状况能够反映行人受干扰程度, 对有干扰和无干扰状况的轨迹点数进行统计。以距人行横道原点的水平距离为横坐标, 单位网格面积上平均行人轨迹点数为纵坐标, 得到单位面积上行人的轨迹点数分布, 如图7所示。
 | 图7 行人轨迹点密度示意图Fig.7 The pedestrian trajectory point density diagram |
图7表明由于左转机动车的阻滞使得在受干扰的状况下, 行人的过街轨迹点密集程度增加, 表现为在左转机动车和行人轨迹冲突区附近(横坐标13~16附近)出现了明显的轨迹点叠加状况。
在上述微观特性研究的过程中发现绿灯时间对行人的过街行为存在不可忽略的影响, 因此分析绿灯时间变化对行人轨迹变化的影响, 见图8。
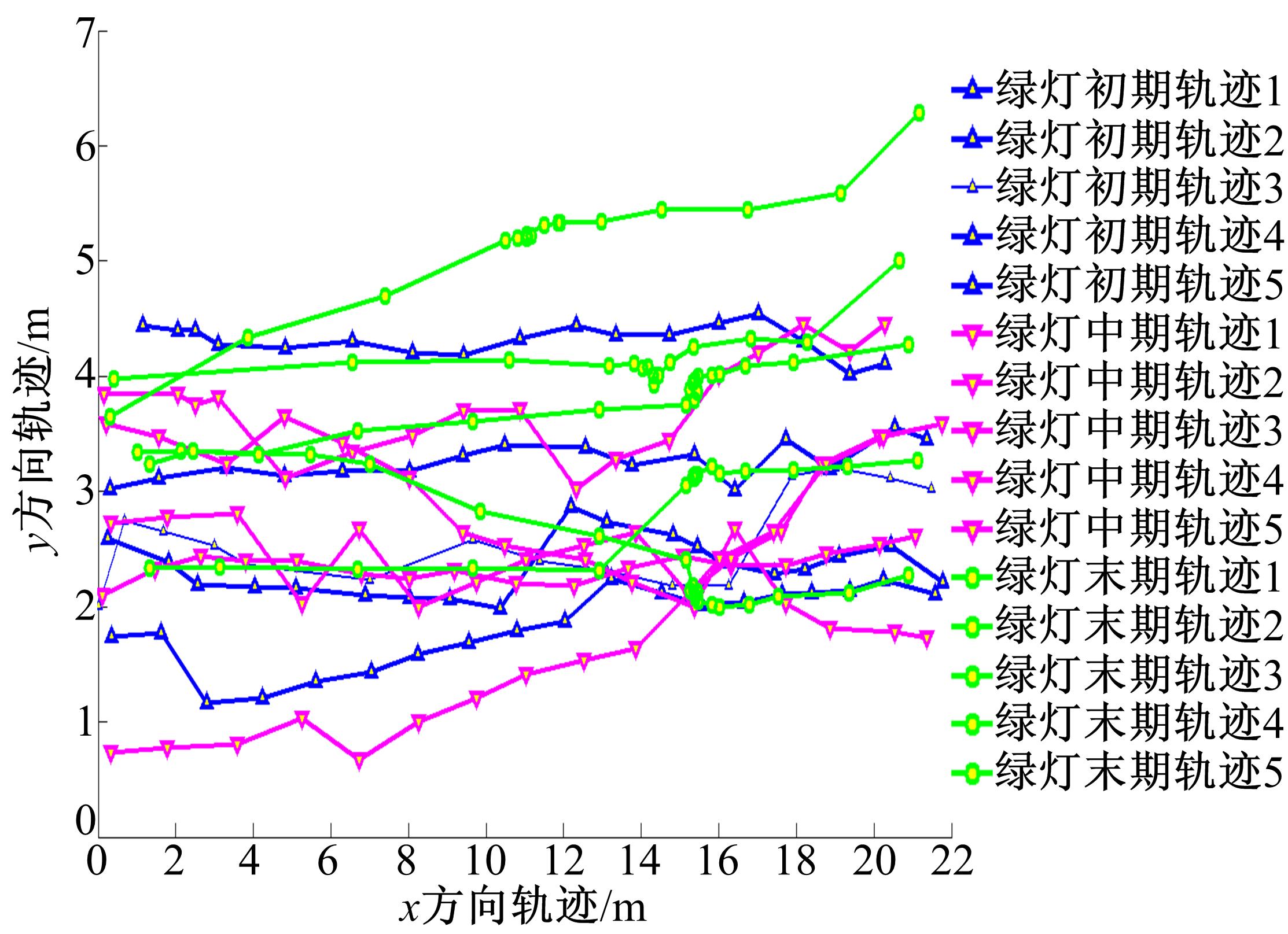 | 图8 左转车干扰及绿灯时间共同作用下的行人轨迹示意图Fig.8 Trajectory schematic of the pedestrians under the turn left vehicles and the green time |
在绿尾及黄灯时间, 由于信号灯和左转机动车共同作用, 开始为均匀的轨迹点, 然后受左转机动车阻滞, 行人出现等待, 直到绿灯末期或黄灯时间才有可穿越间隙, 而此时的时间不足够行人过街, 多因素共同刺激行人出现加速快跑的行为。
为进一步反映四种典型情况行人行为的变化规律, 分析了样本行人位移随时间的变化趋势, 以行人过街时刻为横坐标、行人在对应时刻发生的位移为纵坐标, 绘制了不同过街方式的位移变化趋势, 如图9所示。
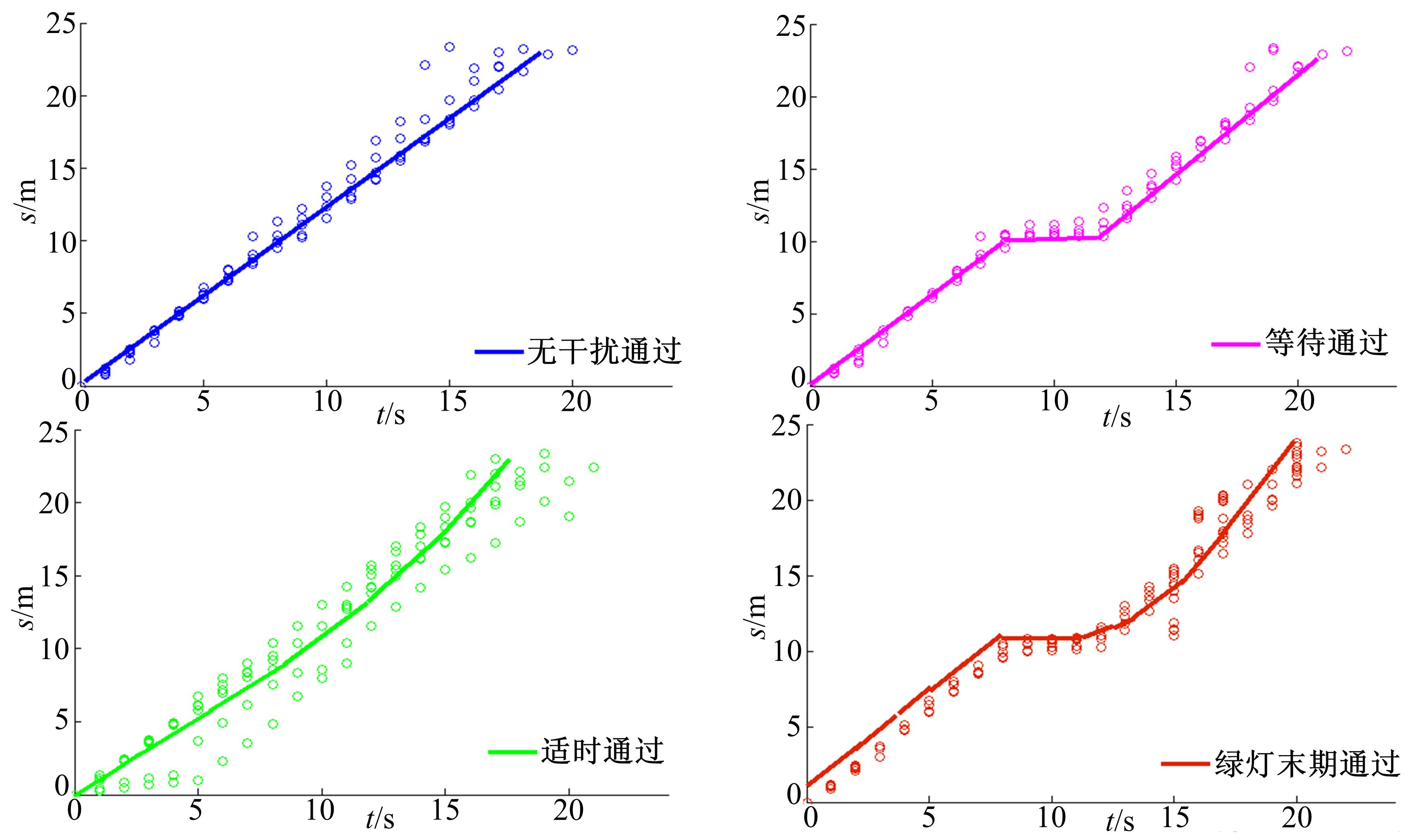 | 图9 行人位移变化趋势图Fig.9 Displacement change trend diagram of pedestrians |
从图9可以看出, 行人在无干扰通过方式下的位移变化近似直线, 行人采用匀速过街; 等待通过和绿灯末期通过由于受到左转机动车的干扰均出现位移持平阶段, 说明行人出现了一段时间的等待, 但绿灯末期通过在持平后抬升更加明显, 说明行人受信号影响采用了较快速度过街; 至于适时通过情况位移没有出现持平现象, 说明行人无等待情况, 但由于行人过街间隙选择存在一定差异, 与无干扰通过相比, 行人位移点分布范围较广, 表明速度变化较大。
上述分析得到的宏观和微观的特性变化可以用行人过街时间的改变来体现, 即干扰延误。无专用左转相位人行横道线处行人干扰延误主要成因是避让左转及右转机动车, 此时行人减速或者是踱步等待导致过街时间的损失。通过上述分析得到并非所有的行人都会产生干扰延误, 即只有受干扰状况下的行人过街行为才会产生干扰延误值。为此统计得到受干扰行人在10个周期的平均干扰延误如表4所示。
| 表4 行人干扰延误统计的数字特征 Table 4 Pedestrian interference delay characteristics statistical figure |
由表4得到的左转机动车对行人过街行为的干扰表现为两种形式:阻滞和刺激, 即阻滞对行人干扰产生的延误为正值; 刺激干扰使行人加速产生的延误为负值, 因此对于行人过街延误的计算中, 要对行人干扰延误做特殊计算, 否则容易导致信号配时不合理等状况。
通过实际调查, 运用视频处理手段分析行人在受到干扰后的运行特性的变化, 最终得到左转机动车干扰下的干扰延误的计算值, 说明干扰延误是行人过街延误过程中不可忽略的一个参数, 单纯的信号延误不能作为两相位及三相位信号配时的准确参数。研究成果可为最短绿灯时间计算、行人过街安全评价以及相位的设置等提供参考。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|