













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
混合动力汽车多平台控制策略架构
[曾小华1  , 彭宇君
, 彭宇君2 , 宋大凤1 , 白鸽2 , 王庆年1 ]
, 彭宇君|
|


作者简介: 曾小华(1977),男,副教授.研究方向:混合动力汽车关键技术.E-mail:zengxh@jlu.edu.cn
为了减小混合动力汽车的开发周期和成本,提高开发效率,提出一种基于Simulink的适用于不同开发阶段、不同仿真环境、不同构型、不同车型的具有良好可读性的混合动力汽车多平台能量分配策略的通用构架。采用标准化、模块化、层次化的建模思想进行模型框架的搭建。仿真验证表明,与现有的模型框架相比,采用本文架构的控制算法具有良好的可读性、扩展性、通用性、移植性和继承性等特点。
In order to reduce the development period and cost of hybrid electric vehicle, and improve the efficiency of development, a more readable Matlab/Simulink based control strategy architecture for hybrid electric vehicle is proposed. The architecture is suitable for different simulation environments, different configurations and different vehicle types. The ideals of standardization, modularization and stratification are applied to build the architecture. It is verified that compared with the existing architecture, the new proposed architecture is more readable, extendable, universal, portable and inheritable.
一些具有不同优势的商用软件, 如Simulink与Cruise、AMESim、PSAT等的联合仿真[1, 2, 3, 4]逐渐成为研究混合动力汽车能量分配策略的主要手段。针对混合动力汽车产品开发的各个阶段, 基于Simulink的V模式开发方法满足了汽车电控系统开发中的高可靠性、快速和低成本等诸多要求, 也逐渐成为了汽车行业开发混合动力汽车控制系统的主要手段[5]。然而, 现有的混合动力汽车Simulink能量分配算法模型, 大多只是针对某一固定的车型、固定的联合仿真软件和V模式开发中的某一个环节而搭建的[6, 7, 8, 9], 存在着移植性、通用性和继承性差的问题, 难以满足当前混合动力汽车对高开发效率的要求。为解决上述问题, 本文采用标准化、模块化的建模思想, 提出一种基于Simulink的适用于不同开发阶段、多种仿真环境、不同构型、不同车型的混合动力汽车多平台控制策略架构。
现代控制系统开发流程(V模式开发流程)包括:功能设计与离线仿真、快速控制原型、代码自动生成、硬件在环仿真、标定/ 整车测试。这种开发流程构成了从功能设计、软件编程、可靠性测试到标定的汽车电控系统开发一体化解决方案。
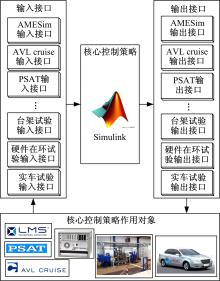
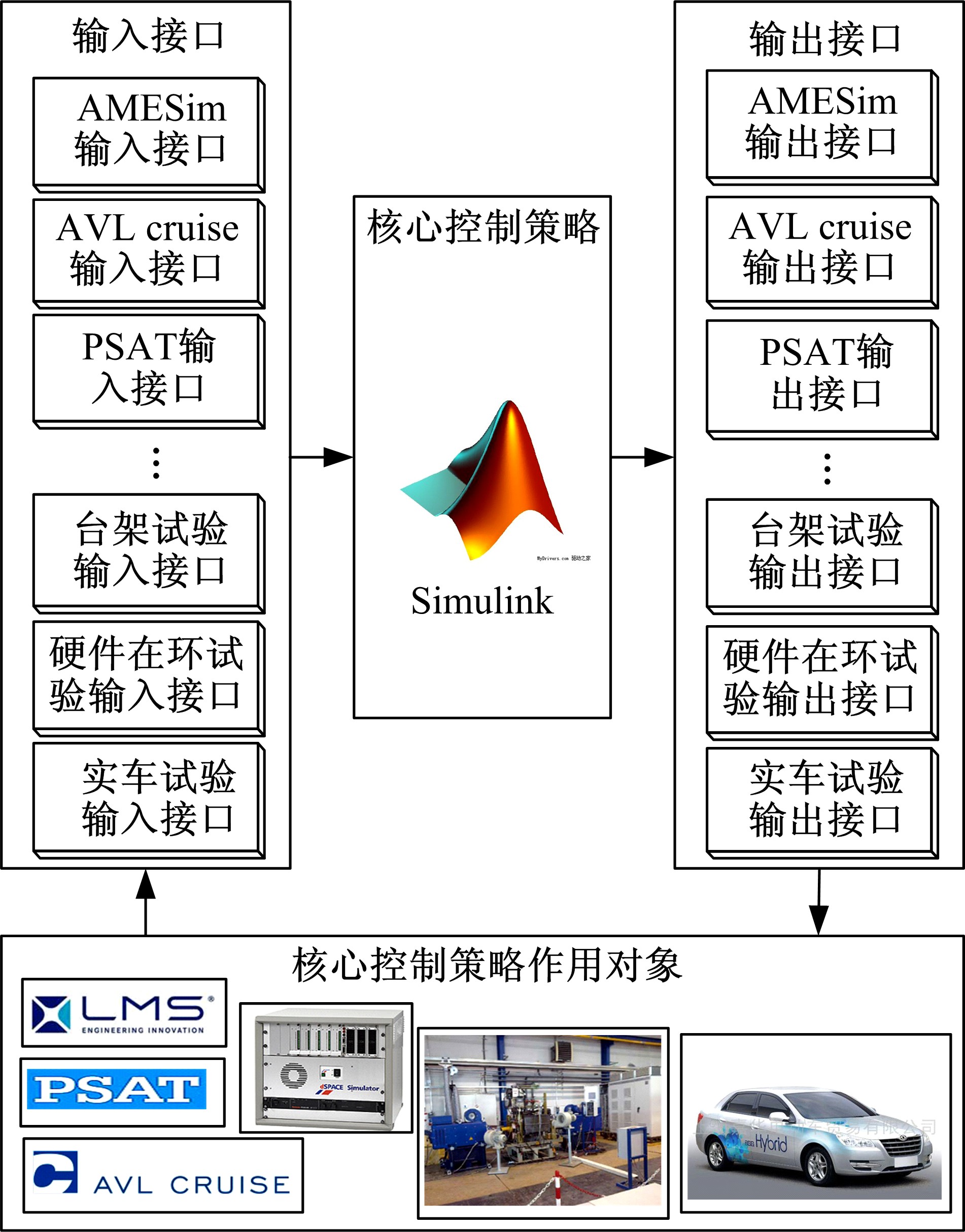 | 图1 采用多平台能源分配框架的平台Fig.1 Platform using multi-platform control strategy |
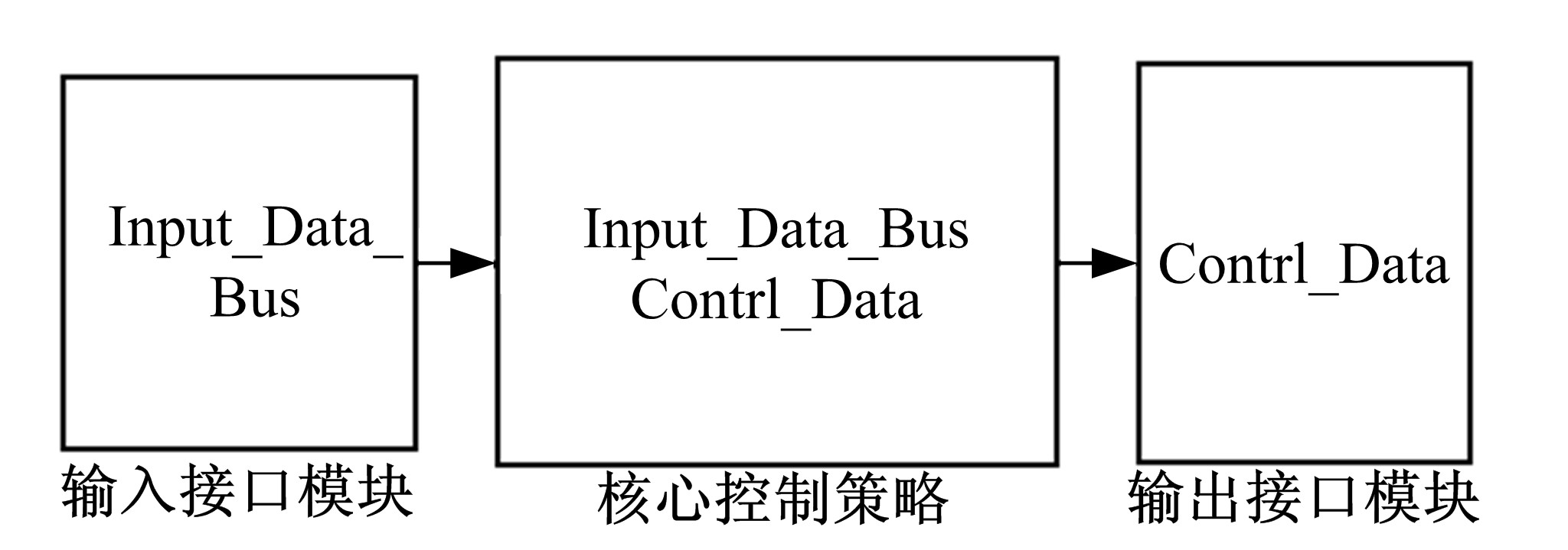
在混合动力汽车电控系统V模式开发流程中, 基于Simulink的能量分配策略贯穿于整个开发过程。不同阶段的能量分配策略的主要思想是一致的, 但是由于不同阶段(离线仿真/硬件在环/实车调试)能量分配策略针对的情况不同, 控制策略作用的对象也不同。随着开发阶段的不断深入, 常常需要对控制策略做出相应的调整。另外在功能定义阶段, 若需要采用不同的仿真平台, 也存在更换平台时的策略调整。因此, 本文提出多平台控制策略架构, 将能量分配的核心控制策略和输入接口、输出接口划分为三个完全独立的部分, 如图1所示。其中, 核心控制策略为能量分配的核心算法部分, 而输入接口和输出接口则完成核心策略和不同平台之间的信号对接和交互。
核心策略的输入和输出信号是根据实车实际情况能够直接或者间接获取的并与能量分配有关的信号。为了方便不同的平台与核心能量分配策略的对接, 输入接口和输出接口部分需要结合能量分配核心策略模块和各个平台的特点, 针对各个平台分别进行信号的规整和转换处理。例如, 实车中加速踏板开度一般是由电压信号表示的, 而能量分配的核心策略中一般采用0~100%的小数来表示加速踏板的开度, 因此需要在图1中的实车试验输入接口中对加速踏板电压信号进行标定。采用图1中的框架后, 当整车在不同平台之间切换时, 不需要对核心能量分配策略做出调整, 只需要切换到相应的接口即可。一般而言, 能量分配算法中输入到核心控制策略的信号以及从核心控制策略输出的信号如表1所示。
| 表1 核心控制策略相关的输入/输出信号 Table 1 Input/output signals of main control strategy |
核心控制策略的模型框架的构建基本原则如下:
(1)采用总线结构:所有的信号以及与模式切换相关的状态量均输入到总线, 各个模块的输入信号也均取自总线。
(2)统一的建模规范:依据Matlab控制算法建模指南MAAB(MathWorks automotive advisory board)中建模规范建立模型, 关键参数和可以标定的参数均写在m文件里, 各个模块、信号、参数的命名规则均参考在汽车行业被广泛应用的开源仿真软件Advisor的命名规则。
(3)采用模块化、使能结构:依据功能划分独立的模块, 通过调整模块是否使能, 开启或者关闭相应的功能, 从而满足不同复杂程度的模型的要求。例如, 可以对相应的使能信号赋值, 如控制诊断、信号处理等是否使能。
依据上述原则, 能量分配核心控制策略可以分为必备模块和选配模块两个部分。顶层必备模块包括信号预处理、模式选择、行车控制三个主要部分。这三个部分与能量分配规则密切相关。而选配模块主要包含监视器和诊断编码等, 其中监视器是为了在调试时为相关信号的监测提供便利; 而诊断编码则用于带有诊断功能的模型中诊断代码的编写。如图2所示, 模型采用总线结构。采用总线结构的优势在于:①减小了同一个信号多处使用时模型的复杂程度, 使得模型层次更加清楚, 可读性更好; ②增加或减少选配模块时, 对模型的改动小, 扩展性好; ③关键信号引入总线, 方便关键变量的监测, 使得调试过程中错误的排查更加简单。
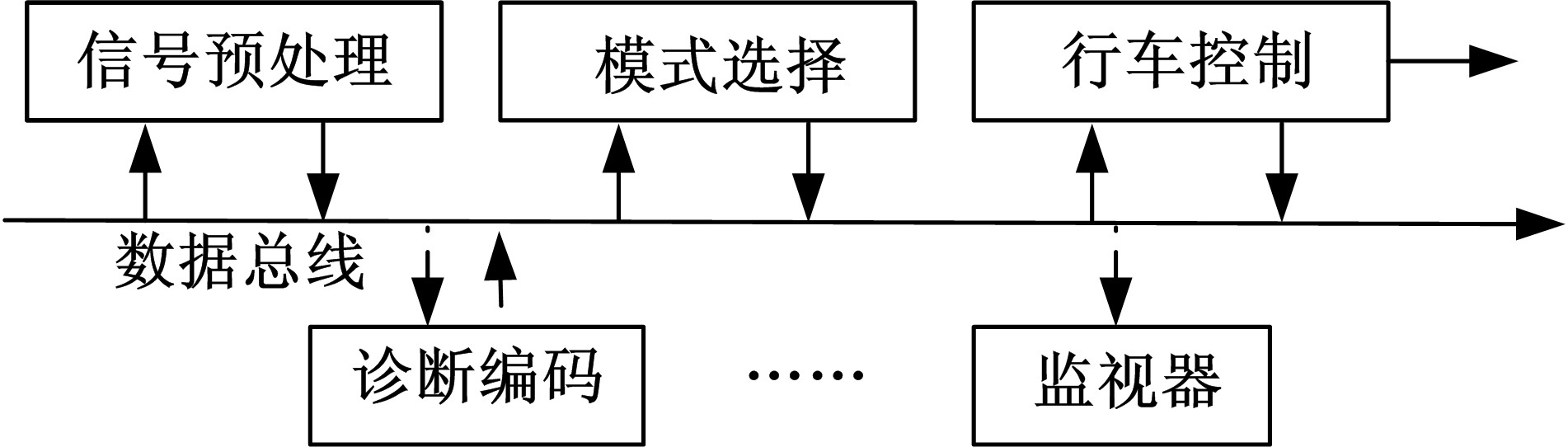 | 图2 能量分配核心控制策略Fig.2 Main control strategy for energy distribution |
1.2.1 信号预处理
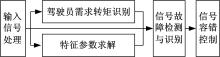
信号预处理部分必备基本模块如图3所示。
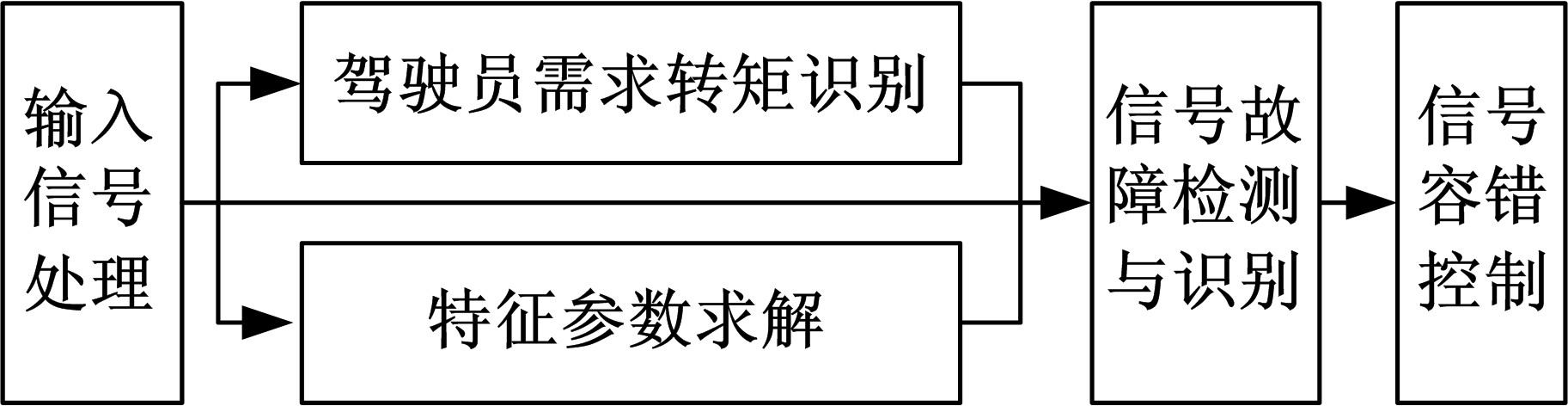 | 图3 信号预处理模块构架Fig.3 Architecture of signal preprocessing module |
输入信号处理主要是根据实际信号的特点选取限幅滤波、中位值滤波、限幅平均滤波、一阶滞后滤波、小波分析、短时傅立叶变换等方法进行处理, 去除信号中的干扰噪声。
驾驶员需求转矩识别是根据车速、加速踏板开度、制动踏板开度等信号采用查表、模糊逻辑等算法求解当前需求的驱动转矩。
特征参数求解是根据输入信号得到系统的其他一些与能量分配有关的特性参数, 如发动机峰值转矩、经济曲线; 电机额定转矩、外特性、超过额定转矩允许工作时间; 电池允许的最大充、放电电流等。混合动力汽车具有不同的构型, 其包含的主要部件不同, 输入信号也会不同, 具体的特征参数主要依据当前构型包含的部件和后续模式选择模块以及行车控制模块的需求来求解。如并联构型和串联构型, 可根据驱动电机转速查表得到驱动电机的峰值转矩、额定转矩等; 具备BSG的构型, 可根据BSG电机的转速查表得到BSG电机的峰值转矩、额定转矩等。
当要求控制策略具有一定的容错能力或者具备在线诊断能力时, 需要进行信号故障的检测和识别。其具体包括对通讯异常、信号本身异常、信号间逻辑关系异常等的检测与识别。一般可以采用限值检测、合理性分析、模糊逻辑、卡尔曼滤波等进行故障的检测; 采用计时、计数等方法进行故障的识别。
信号的容错控制是在检测和识别完故障后, 根据故障持续的时间或者错误严重程度对信号采取如下不同的容错处理:①采用备用值替代; ②采用算法估算值或者其他信号替代; ③采用该信号前一时刻的值。
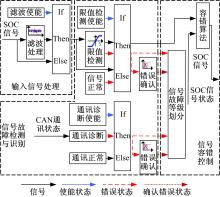
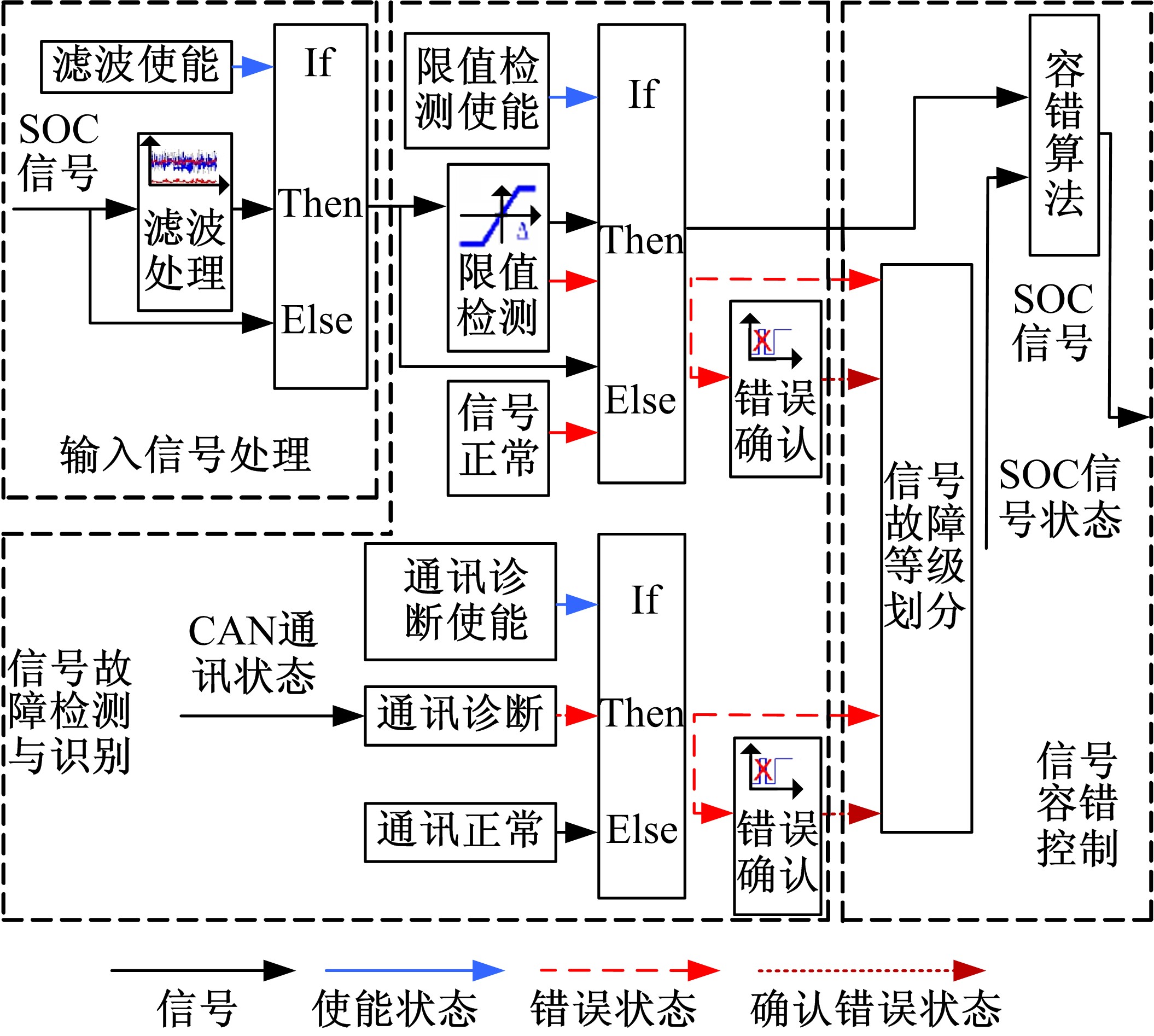 | 图4 SOC信号预处理模块框架Fig.4 Architecture of SOC signal preprocessing module |
信号的处理采用模块化使能结构, 以电池SOC的处理(见图4)为例, 该框架列出了实车中SOC信号需要进行的各种处理, 具体包括:滤波处理、限值检测(包括斜率限制、最大/最小值限制)、通讯诊断、错误确认和容错算法。当运用于不同平台时, 可以调整相应的使能状态信号关闭对应的处理。例如将依据本框架搭建的运用于实车的模型应用于新车型开发的离线仿真阶段时, 关闭信号故障检测与识别功能, 并且调整相应的滤波参数即可。因此该模型具有良好的继承性。
1.2.2 模式选择
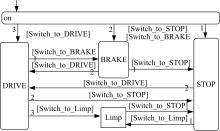
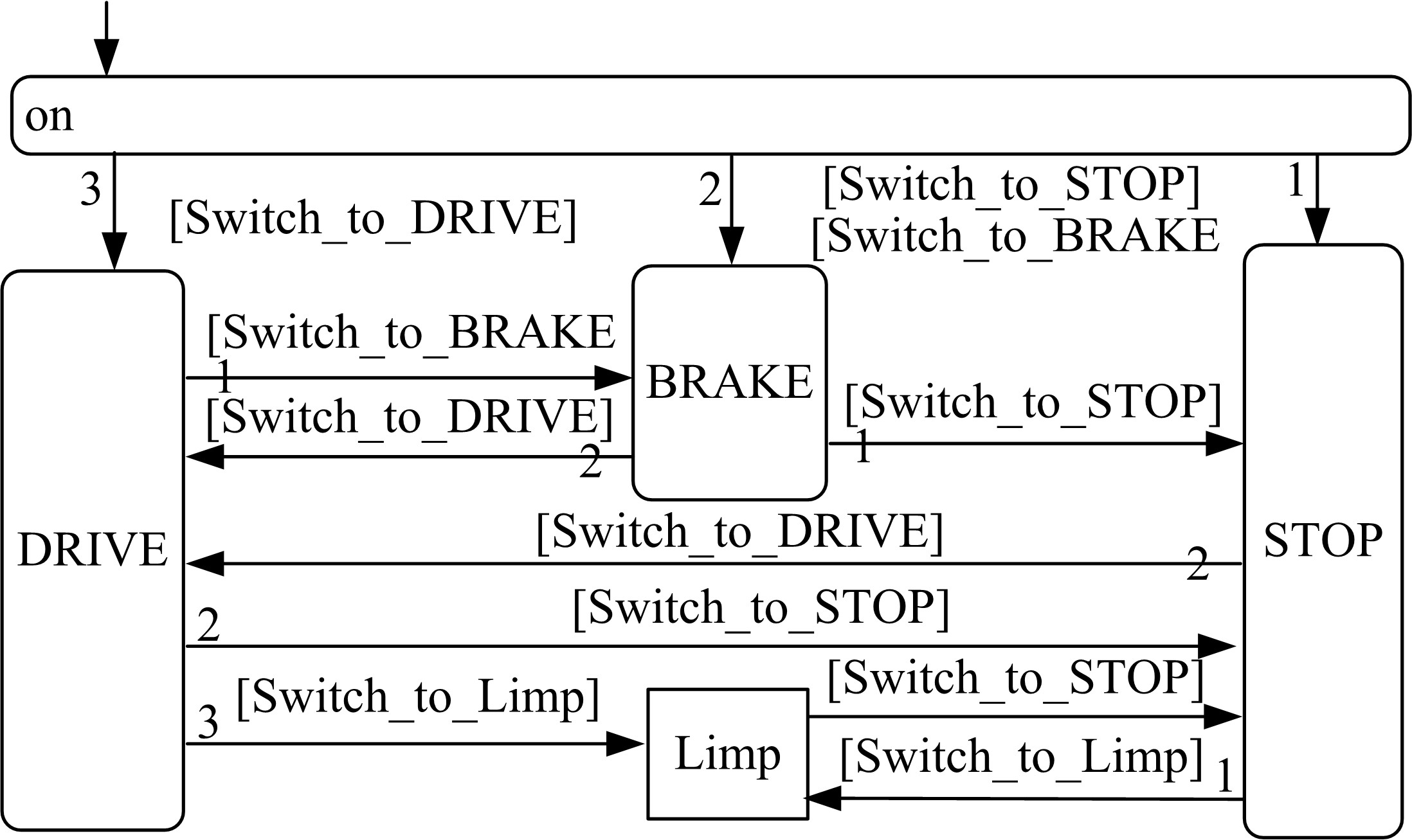
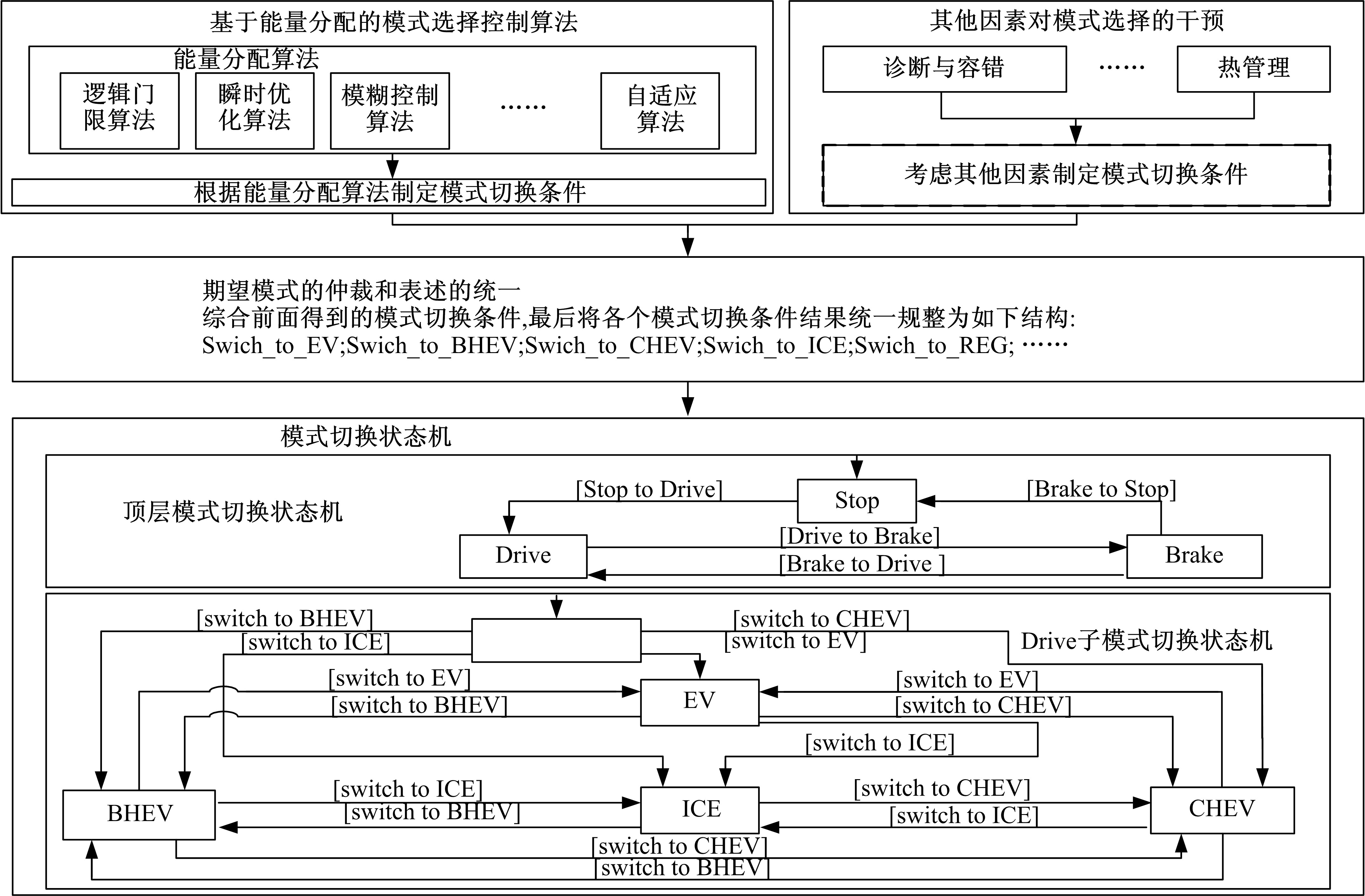
混合动力汽车的模式选择和各个模式下的行车控制是混合动力汽车的核心。一方面, 串联、并联、混联等不同构型的混合动力汽车所依据的模式选择的原则不同; 另一方面, 模式选择的算法各不相同, 常用的有门限值、瞬时优化、模糊逻辑、动态规划等; 再者, 根据模型的功能需求, 可考虑到其他因素对模式切换的影响, 如诊断与容错控制、热管理等。因此, 各个模式切换条件的定义也不尽相同。但是, 无论怎样, 都可以用如图5中所示的框架表示。其中基于能量分配的模式选择控制算法、期望模式的仲裁和表述的统一、模式切换状态机为必备的模块。首先, 在分析完混合动力汽车的构型特点和功能需求后, 采用不同的能量分配算法可以制定一套模式切换的条件; 另外, 同时也可以考虑诊断与容错控制、热管理、构型等其他因素确定特定状况下的模式切换条件。然后, 将这些模式切换条件综合考虑表述为统一的形式:定义各个模式的切换状态变量用来表示各个模式切换的条件是否满足, 例如, 切换状态变量Swith_to_ICE=1表示当前满足切换到发动机单独驱动的条件; 切换状态变量Swith_to_ICE=0表示当前不满足切换到发动机单独驱动的条件或者当前的混合动力汽车由于构型的原因不具备发动机单独驱动模式(串联构型无发动机单独驱动模式)。最后, 将各个切换变量均输入到模式切换状态机中。模式切换状态机采用Stateflow建立, 为分层结构。它涵盖一般混合动力汽车(包括串联、并联、混联等不同构型)的各个层次的各种工作模式:顶层的Stop(停车)、Drive(驱动)、Brake(制动)等; 驱动层的EV(纯电动)、ICE(发动机单独驱动)、BHEV(发动机、电机联合驱动)、CHEV(发动机工作同时电机充电)、LimpEV(纯电动跛行)、LimpICE(发动机单独驱动跛行)、SHEV(串联模式)等; 制动层的PREG(电机制动)、MB(机械制动)、HREG(电机、机械混合制动)以及各个模式之间可行的切换路径。相应地, 各个切换状态变量均列在相应的切换路径上用以控制模式的切换。根据所开发的混合动力汽车的构型和功能特点可以通过简单地改变模式以及对应的切换路径来快速实现模型的建立。更换算法或者模式切换条件时仅需要对前面基于能量分配的模式选择控制算法部分作修改, 其他部分不需要改动。例如, 将依据本文构型搭建的并联式混合动力汽车的控制策略移植到串联构型时, 令串联构型不具有的模式对应的切换变量值恒为0(如令切换状态
 | 图5 模式选择策略框架Fig.5 Architecture of mode selection strategy |
变量Swith_to_ICE=0); 而对于新增的模式则添加对应的模式和切换路径(如添加SHEV模式、SHEV模式与其他模式之间的切换路径、以及切换状态变量Swith_to_SHEV)。因此, 该框架具有较好的移植性、通用性、快速性和继承性。
1.2.3 行车控制
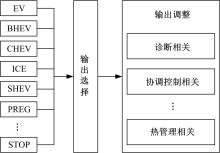
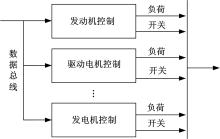
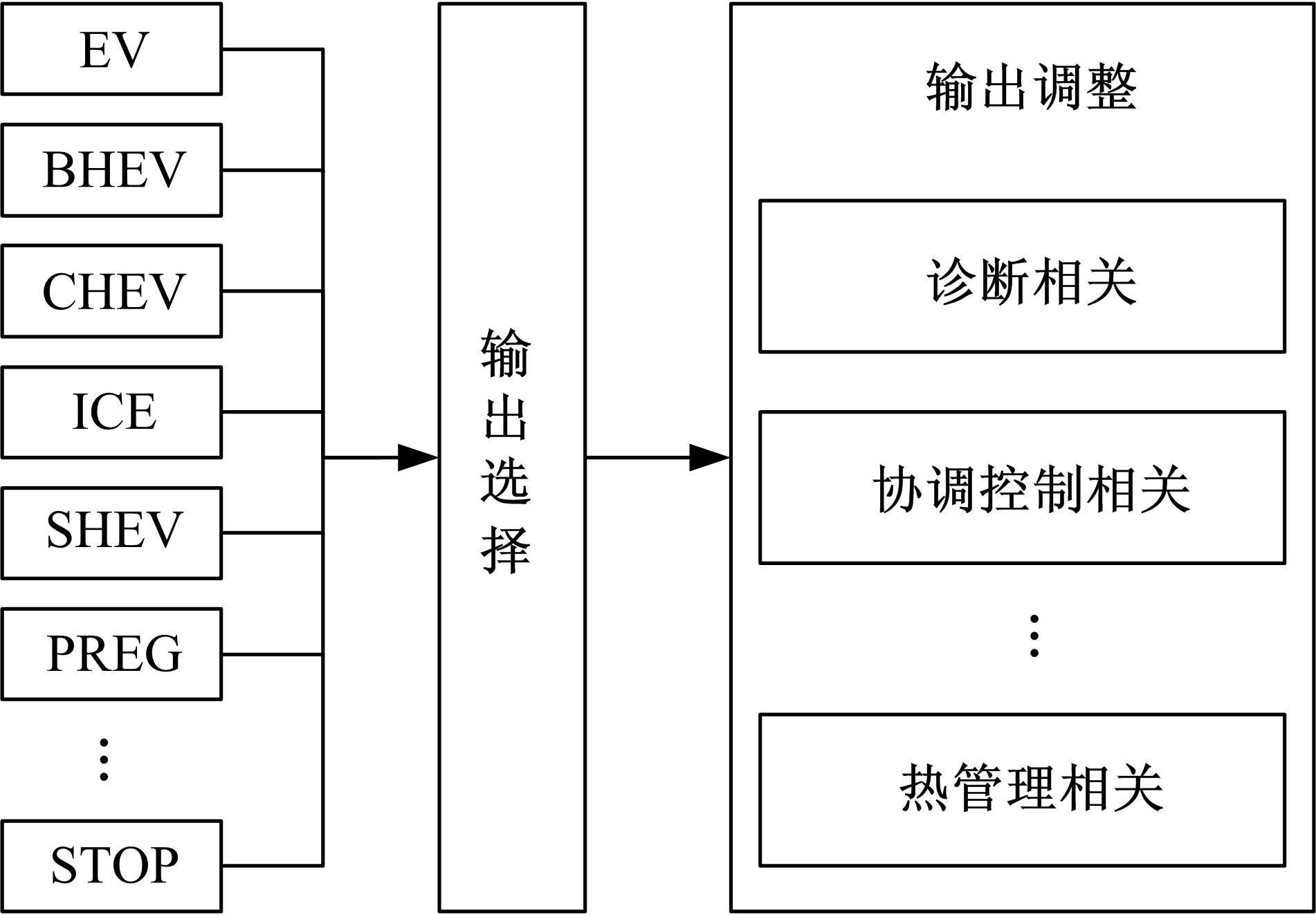
根据模式切换中的模式切换状态机确定的最终的期望工作模式来选择行车控制模块里应该使能的模块, 对该模式下的控制变量进行输出。如图6所示。
 | 图6 行车控制策略框架Fig.6 Architecture of driving control strategy |
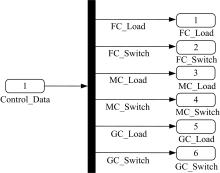
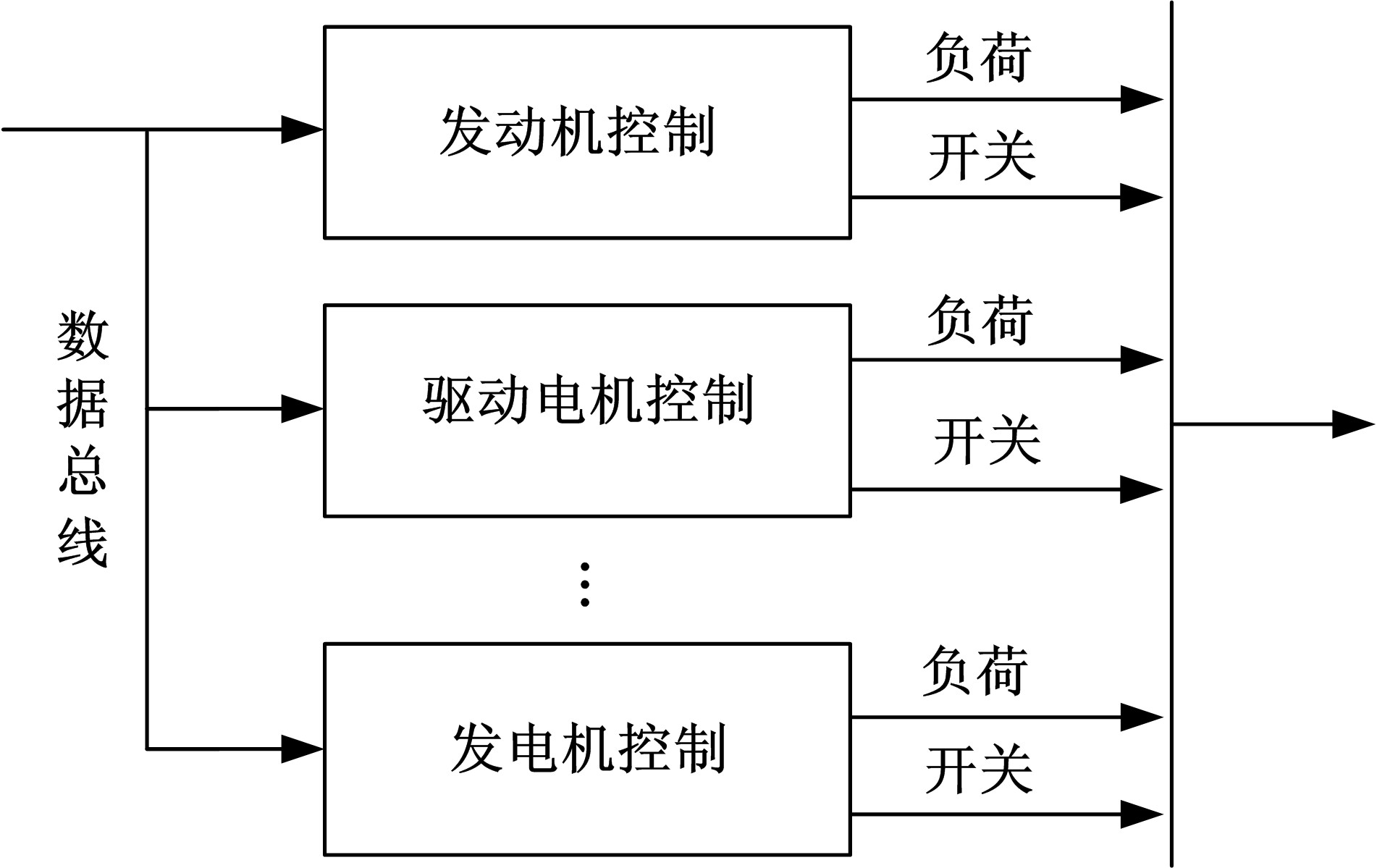
多个模式下的各动力源及变速箱等部件的具体控制由于采用的算法不同、考虑的因素不同, 难以作统一的限定, 但是为了提高模型的可读性和可移植性, 却可以按照各个主要部件以及其相应的控制信号作统一的规整, 如图7所示。根据具体的构型和实际情况, 可控的部件也可以适当地添加或者减少。
 | 图7 各个行车模式下控制策略框架Fig.7 Architecture of each mode control strategy |
如图6所示, 根据模型的性能要求, 还可以对行车控制中输出选择后的各个主要部件的控制信号进行处理。例如, 根据信号或者部件的错误状态进行相应的容错处理; 依据平顺性要求对动力源转矩进行动态协调优化等。
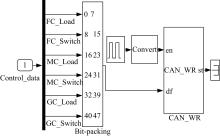
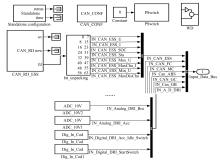
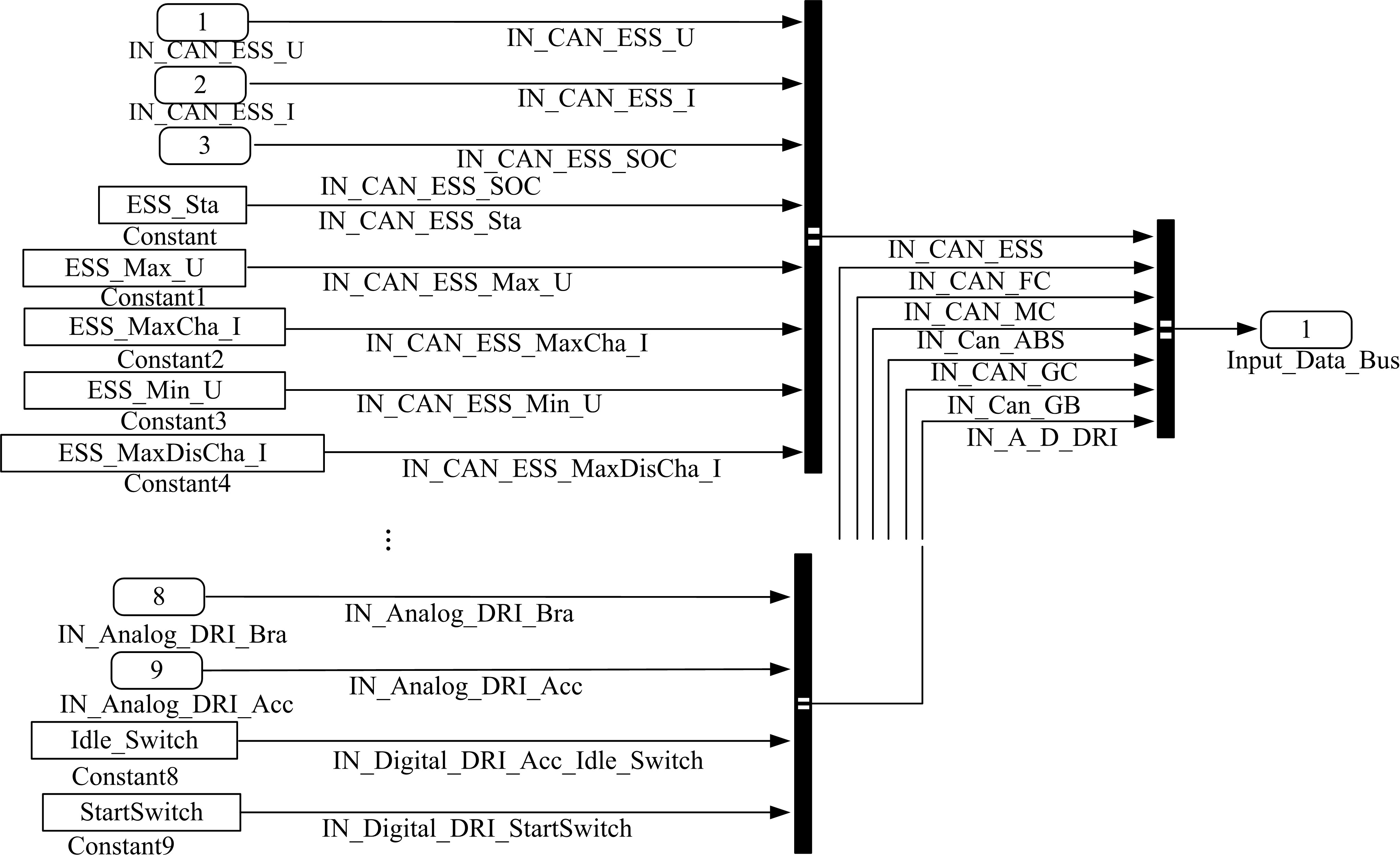
运用本文提出的多平台能量分配策略构架搭建某混合动力汽车控制策略的核心控制策略, 并针对硬件在环平台为该核心模块搭建接口, 如图8所示。图8中的输出接口模块见图9。图8中核心控制策略的内部结构见图10, 从左到右分别为数据处理、模式选择和行车控制三部分。图8中的输入接口模块包括CAN接口配置、CAN接口、A/D接口等, 见图11, 输入到HCU的各个信号按照部件整合到一条总线中。
 | 图8 用于硬件在环的控制策略Fig.8 Control strategy for hardware-in-the-loop |
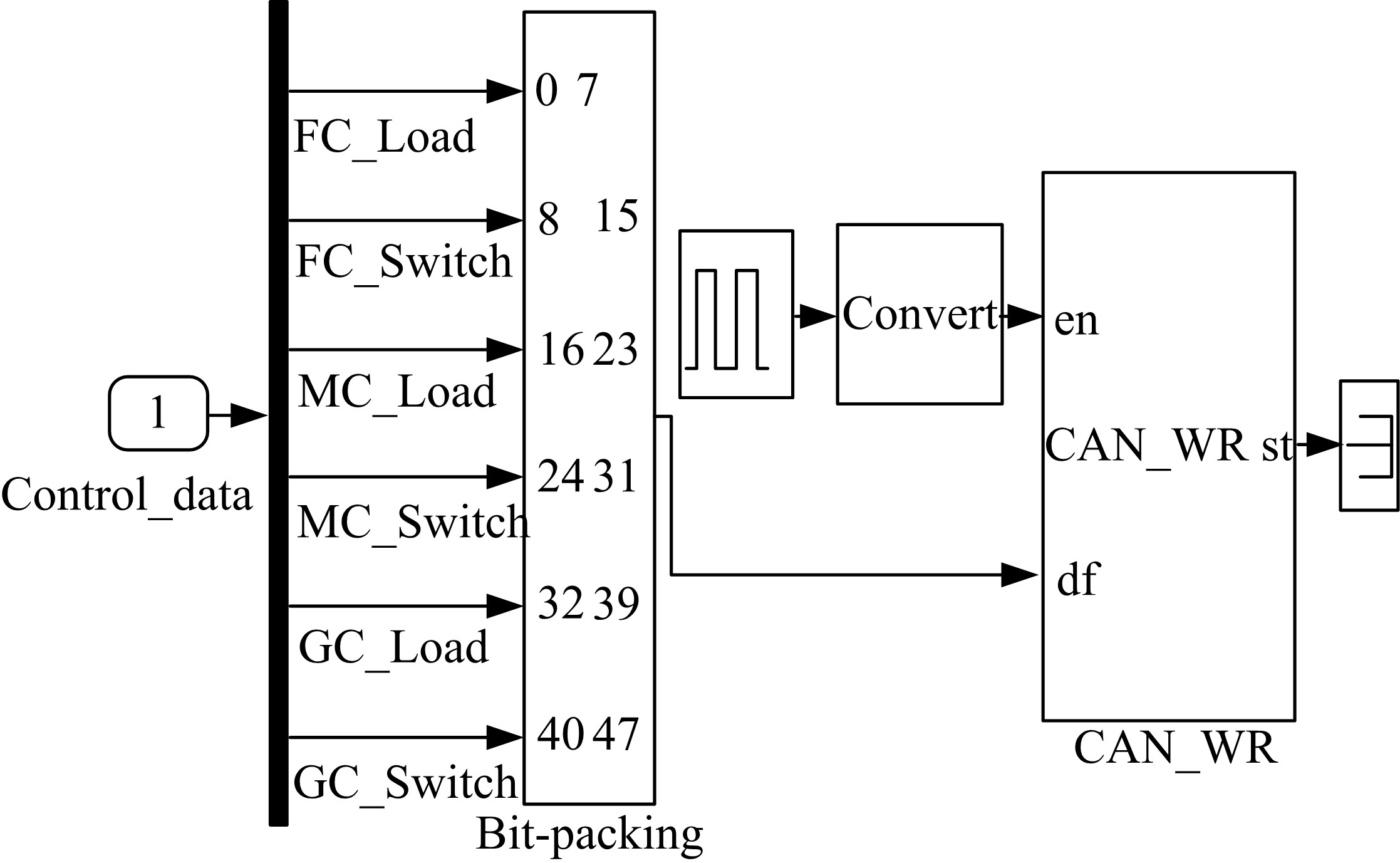 | 图9 硬件在环仿真中的输出接口模块Fig.9 Output interface module for hardware in-the-loop |
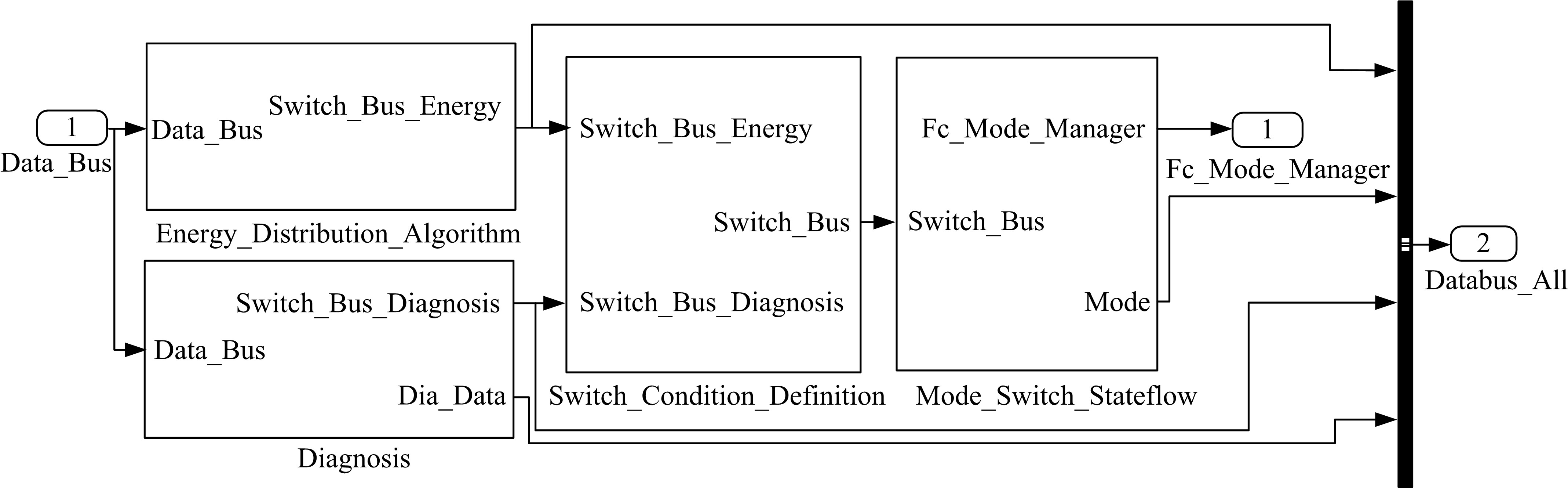
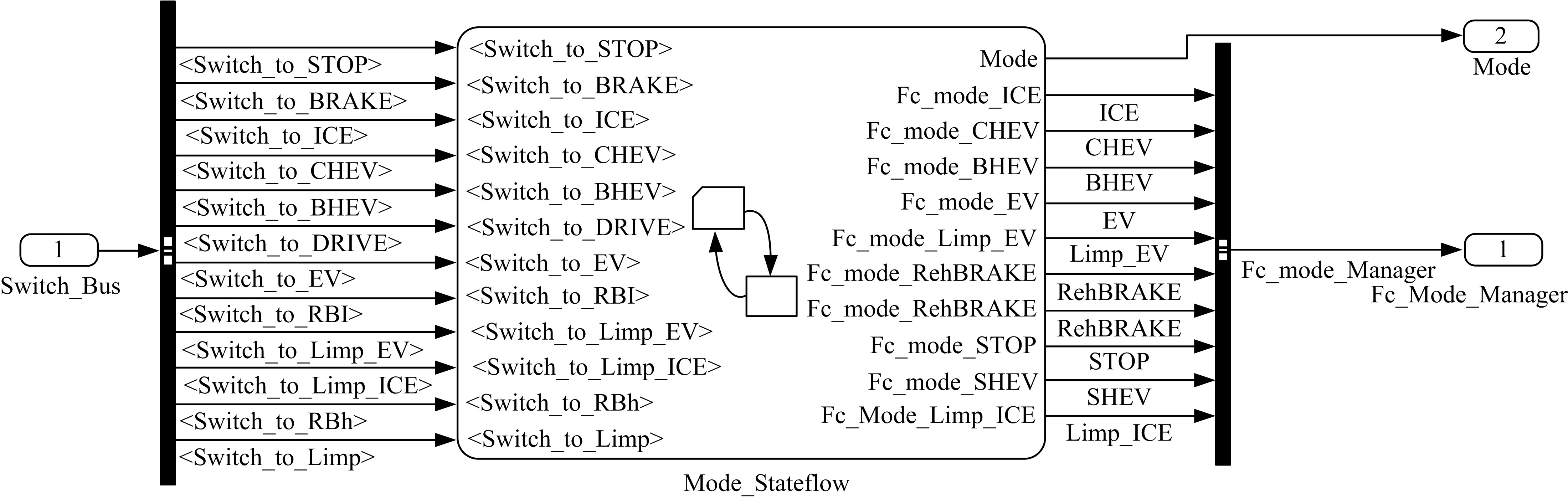
图10中的模式选择部分如图12所示, 这部分包含了能量分配算法、诊断部分、模式仲裁和模式切换状态机。图12中的模式切换状态机输出为当前期望的行车模式以及对应模式的使能信号, 如图13所示。图13中的Stateflow采用多层次结构, 其顶层结构如图14所示。
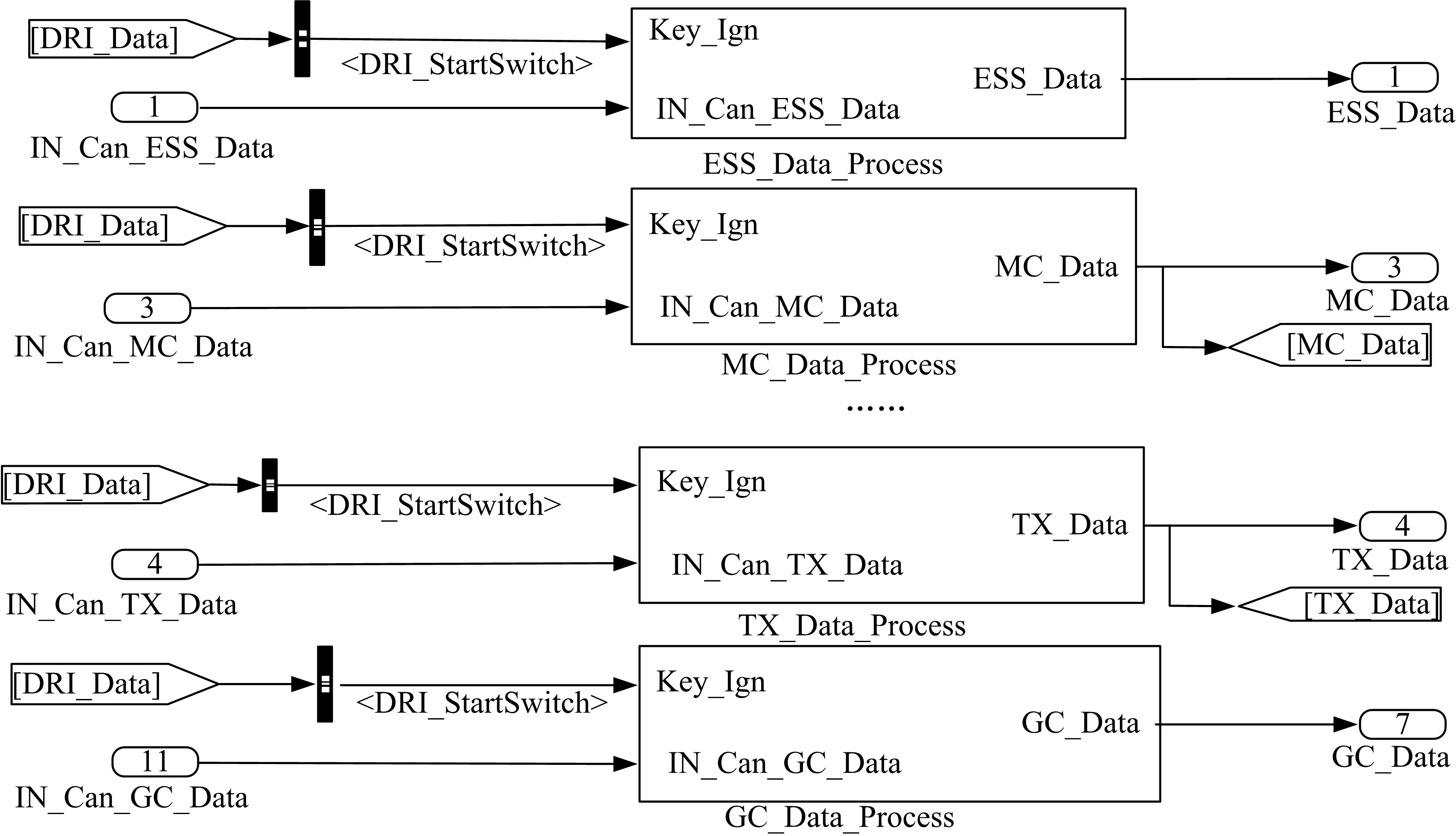
图10中的数据处理部分如图15所示, 这部分按照部件划分各个数据处理子模块, 各个子模块里包含了各个部件信号的处理, 其中驾驶员数据处理子模块里面包含了需求转矩的识别。
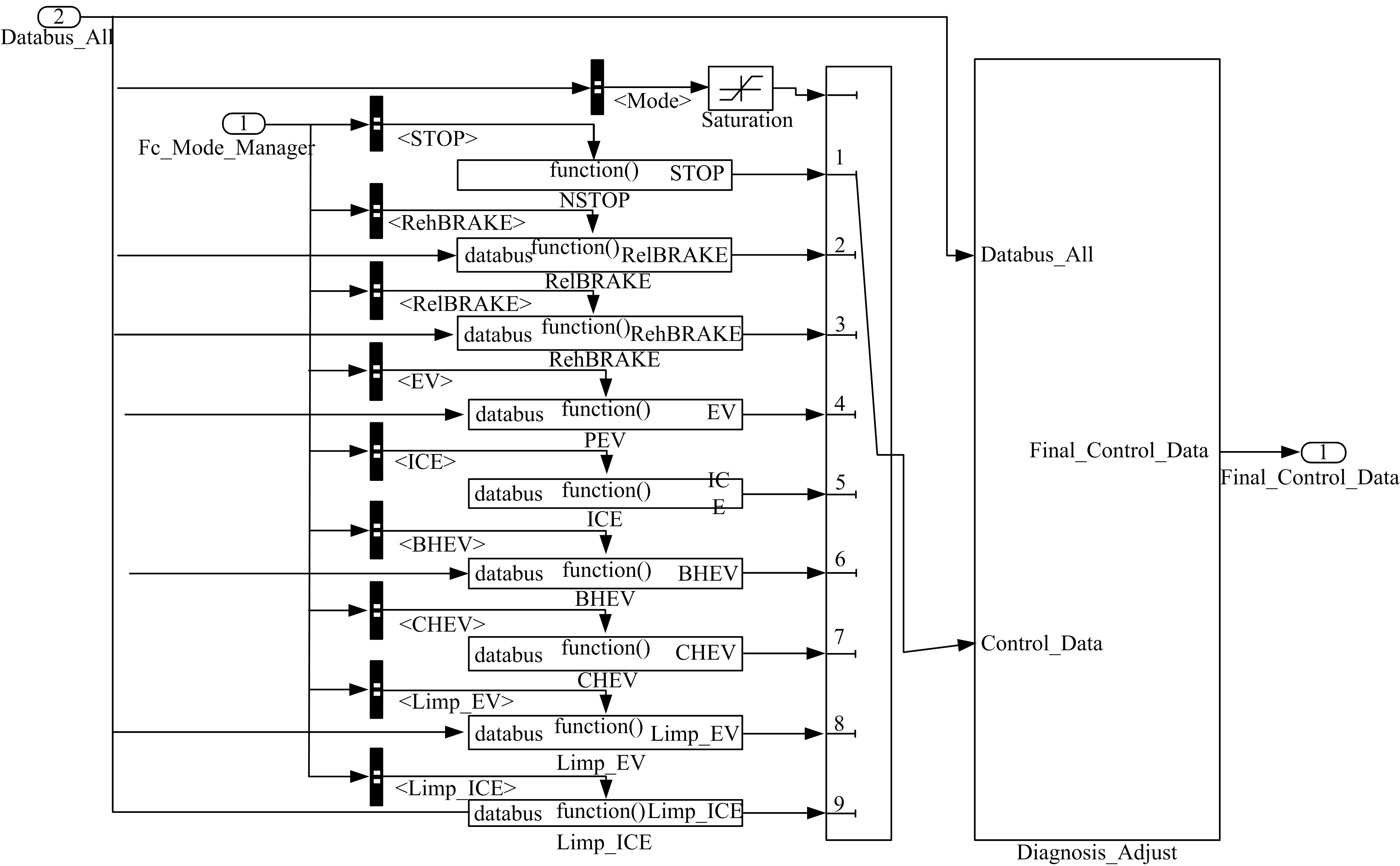
图10中行车部分分为各个模式下主要部件的具体控制模块和考虑诊断时对动力源负荷的调整模块, 如图16所示。
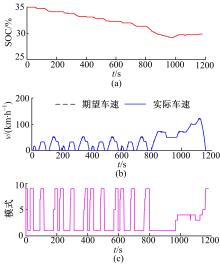
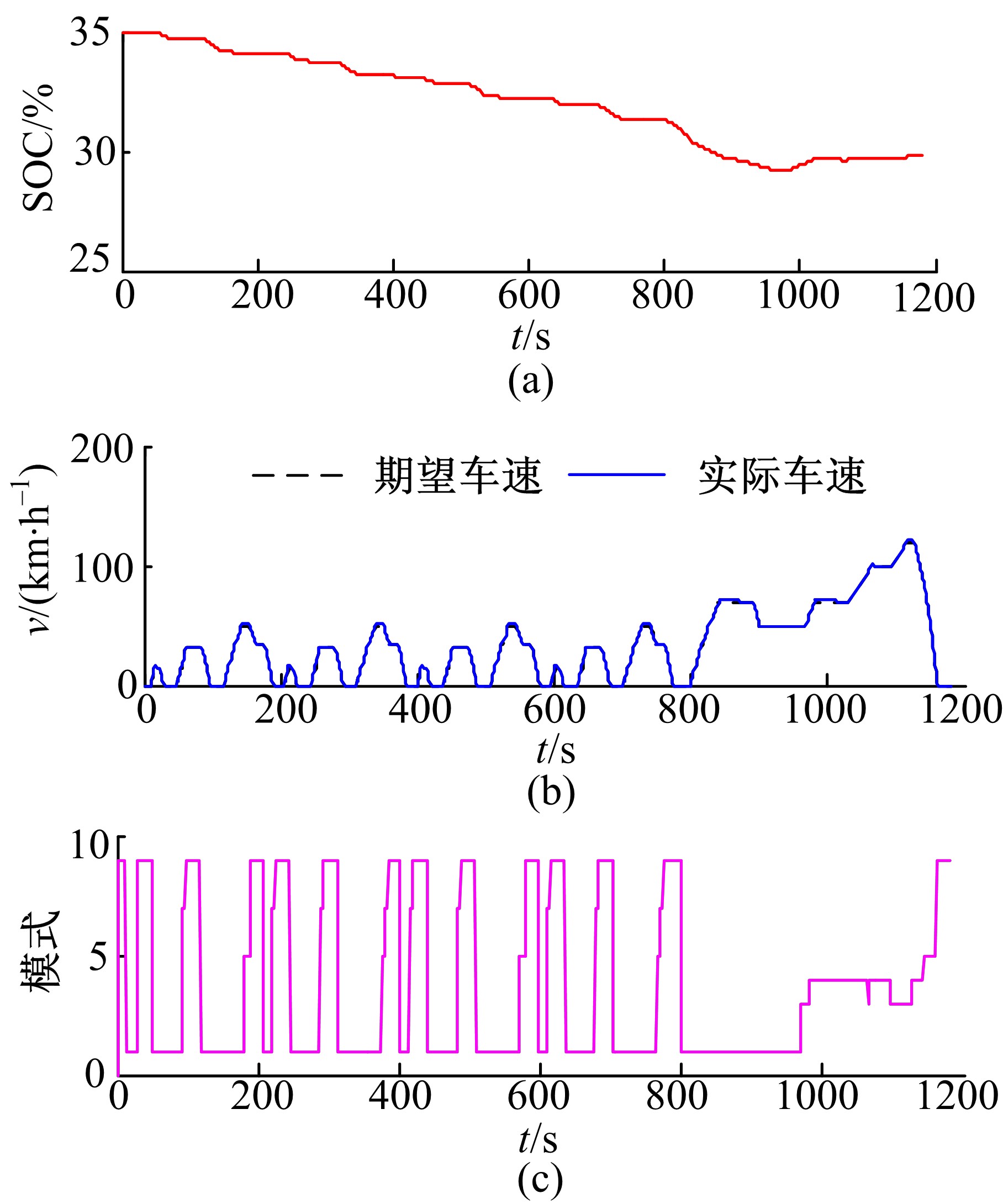
将上述控制策略用于硬件在环平台, 其仿真结果如图17所示。
在建立另外一辆混合动力汽车控制策略时, 前期的与AVL Cruise联合仿真的Simulink控制策略沿用2.1节的控制策略框架, 仅作几点简要修改:①调整能量分配算法中的模式切换条件; ②调整使能参数, 使诊断与容错、输入信号处理等相关模块不使能; ③针对AVL Cruise平台, 为核心模块搭建接口, 包括输入接口和输出接口, 如图18和图19所示; ④修改m文件中控制策略的各参数。
经过简单修改后的控制策略用于Matlab与Cruise的联合仿真, 结果如图20所示。
根据仿真结果可知, 在两个不同平台下, 车速均跟随正常, 车辆模式与预期一致, 电池的SOC响应正常。该离线仿真模型构架采用的是硬件在环中使用的模型构架, 仅对相应的接口和核心控制策略做简单的改动。因此, 本文提出的模型构架具有良好的通用性和继承性。
提出一种基于标准化、模块化、层次化建模思想的适用于混合动力汽车不同开发阶段、不同平台的能量分配策略的通用构架, 该构架具有可读性、可扩展性、通用性、移植性和继承性均良好等特点。通过基于该框架的硬件在环模型和离线仿真模型的搭建, 进一步验证了该框架的通用性和继承性。因此, 采用该框架能够有效地提高混合动力汽车能量分配策略的开发效率。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|