





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
电动轮汽车再生制动系统控制策略
[宋世欣 , 王庆年, 王达]
, 王庆年, 王达]
, 王庆年, 王达]
|
|


宋世欣(1987-),男,博士研究生.研究方向:汽车系统动力学.E-mail:songshx@126.com
运用汽车制动稳定性理论对电动轮汽车的机电复合制动系统进行了分析,参考已有的再生制动控制策略,提出了适用于电动轮汽车的再生制动系统控制策略。使用NEDC工况,分别对电动轮汽车和普通电动汽车进行仿真分析,结果表明:所提出的再生制动系统控制策略适用于电动轮汽车,并且能使电动轮汽车在制动稳定性、能量回收能力上明显优于普通电动汽车。
The electromechanical braking system of vehicle with motorized wheel is analyzed using vehicle braking stability theory. Referring to existing control strategies for regenerative braking system, a new regenerative braking system control strategy for in-wheel motor vehicle is proposed. Using the proposed strategy, simulations of in-wheel motor vehicle and normal electric vehicle are carried out under New European Driving Cycle (NEDC) working condition. Simulation results show that the proposed strategy is applicable to in-wheel motor vehicle, and makes the in-wheel motor vehicle markedly superior to normal electric vehicle in terms of braking stability and energy recovery capability.
随着汽车工业的发展, 传统内燃机所带来的空气污染日益加重以及石油短缺的问题, 正在得到越来越多的关注[1]。电动汽车的出现有效地解决了节能与环保的双重问题, 被认为是传统车辆的理想替代品[2]。电动汽车具有能量来源可持续、零排放、低噪音等优势, 同时, 电动汽车通过自身的驱动电机, 可以实现制动能量回收功能。
制动能量回收, 即汽车在制动时, 通过电机将行驶时的部分机械能转化为电能储存在动力电池、超级电容等储能设备中, 供驱动时使用, 以达到延长电动汽车续驶里程的目的, 同时还可起到减少制动器工作强度、延长机械制动系统寿命的作用。
因为具备上述优点, 制动能量回收技术已成为纯电动汽车和燃料电池汽车等新能源汽车节能减排的主要技术之一。本文针对电动轮驱动电动汽车的制动系统进行分析, 提出了适用于电动轮汽车的制动能量回收策略, 并对该策略进行了仿真分析。
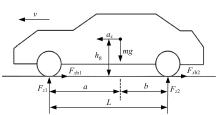
把整车看作一个刚体, 当汽车沿水平路面进行制动时, 受力情况如图1所示。针对电动轮汽车的特点, 为便于分析, 对整车模型提出如下假设和简化:
(1)视整车为刚体, 假设在绝对平坦的水平路面上行驶, 忽略悬架系统、簧上质量与簧下质量间的相互影响。
(2)忽略轮毂电机在驱动和制动时可能产生的转矩脉动所带来的影响。
(3)忽略汽车行驶时的空气阻力、轮胎滚动阻力以及车轮转动惯量在制动时的影响。
(4)假设制动时车轮不会滑移。
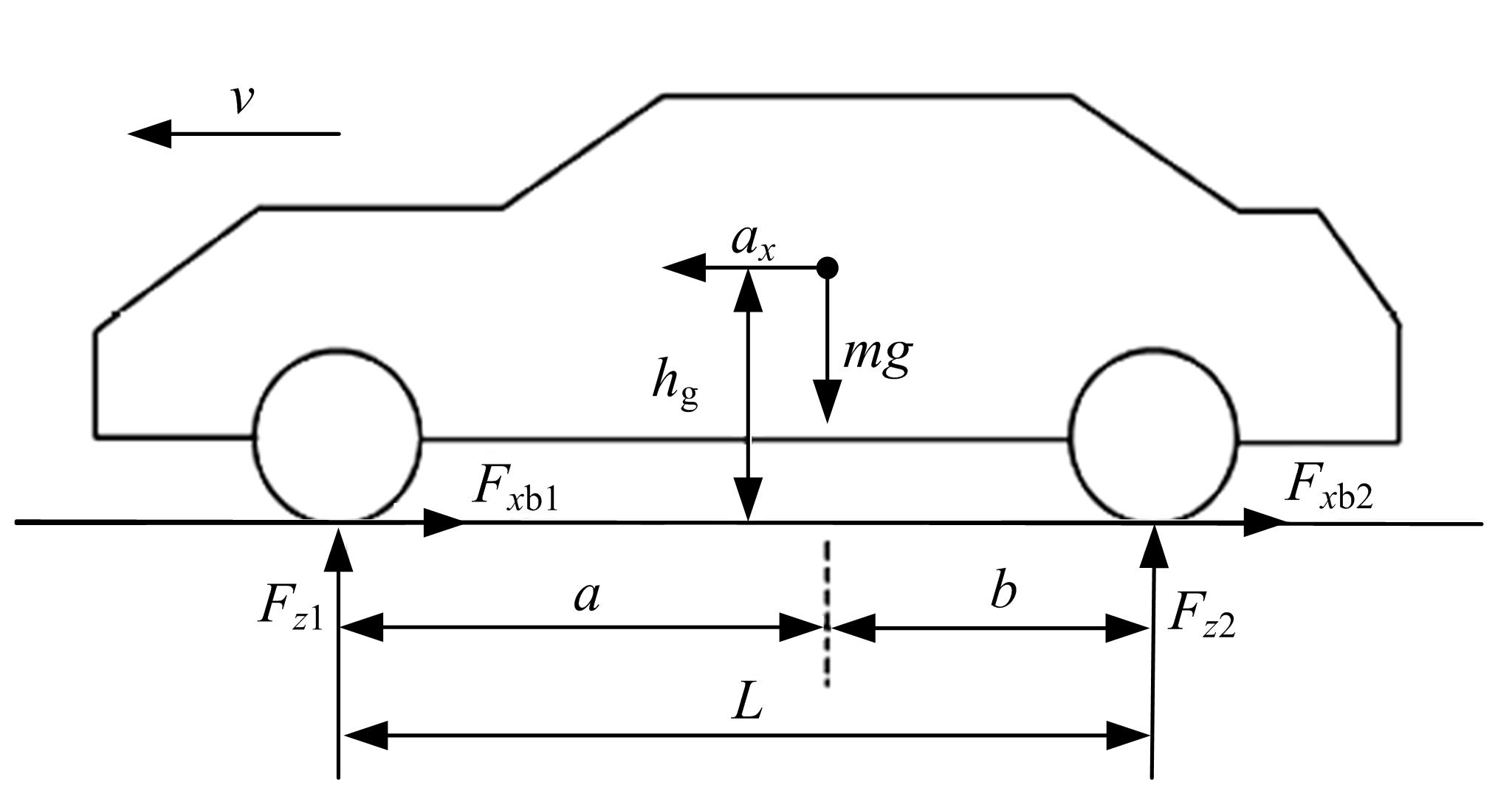 | 图1 整车制动受力Fig.1 Vehicle braking force |
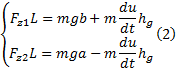
图1中, L为轴距, a为车辆质心至前轴中心线的距离, b为车辆质心至后轴中心线的距离, L=a+b。hg 为车辆质心高度。Fxb1 、Fxb2分别为前后车轮的总制动力, 对于电动轮汽车有:
式中: 

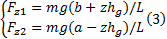
分别对前轮接地点、后轮接地点取力矩, 得:
式中: 



令 
若车辆在不同附着系数的路面上进行制动, 前、后车轮均抱死(不论是同时抱死还是分别先后抱死), 此时 
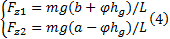
在任何附着系数 
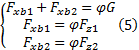
联立式(4)(5)可得前、后车轮同时抱死时轴间制动力分配关系:

式(6)即为理想的前、后轮制动力分配曲线。
电动汽车中再生制动系统的加入, 为电动汽车制动策略的设计添加了一些复杂性, 再生制动系统的控制策略应满足以下要求:
(1)合理分配前轮与后轮的制动力, 以保证车辆制动时的稳定性。
(2)合理分配机械制动与再生制动的制动力, 在不影响制动性能的前提下, 力求尽可能多地回收能量, 以增强车辆续航能力。
(3)控制策略应与ABS、ESP等系统相融合, 不影响其性能。
并行制动控制策略主要应用于单轴驱动的新能源汽车的并行制动系统。所谓并行制动系统是指在不改变传统汽车制动系统的基础上, 加入一个制动电机, 也就是电动汽车的驱动电机, 这样并行制动系统的驱动轴在制动时采用机械制动与再生制动联合制动, 非驱动轴仅采用传统的机械制动[4]。
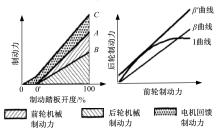
图2为一种典型的并联制动系统控制策略, 可以看出这种策略较为简单, 仅需获取驾驶员的制动踏板开度便可依据策略进行机电制动力的分配, 不改变传统的制动操纵系统即可实现, 成本低, 但是其简单的执行机构和控制策略很难兼顾制动稳定性和能量回收最大化。
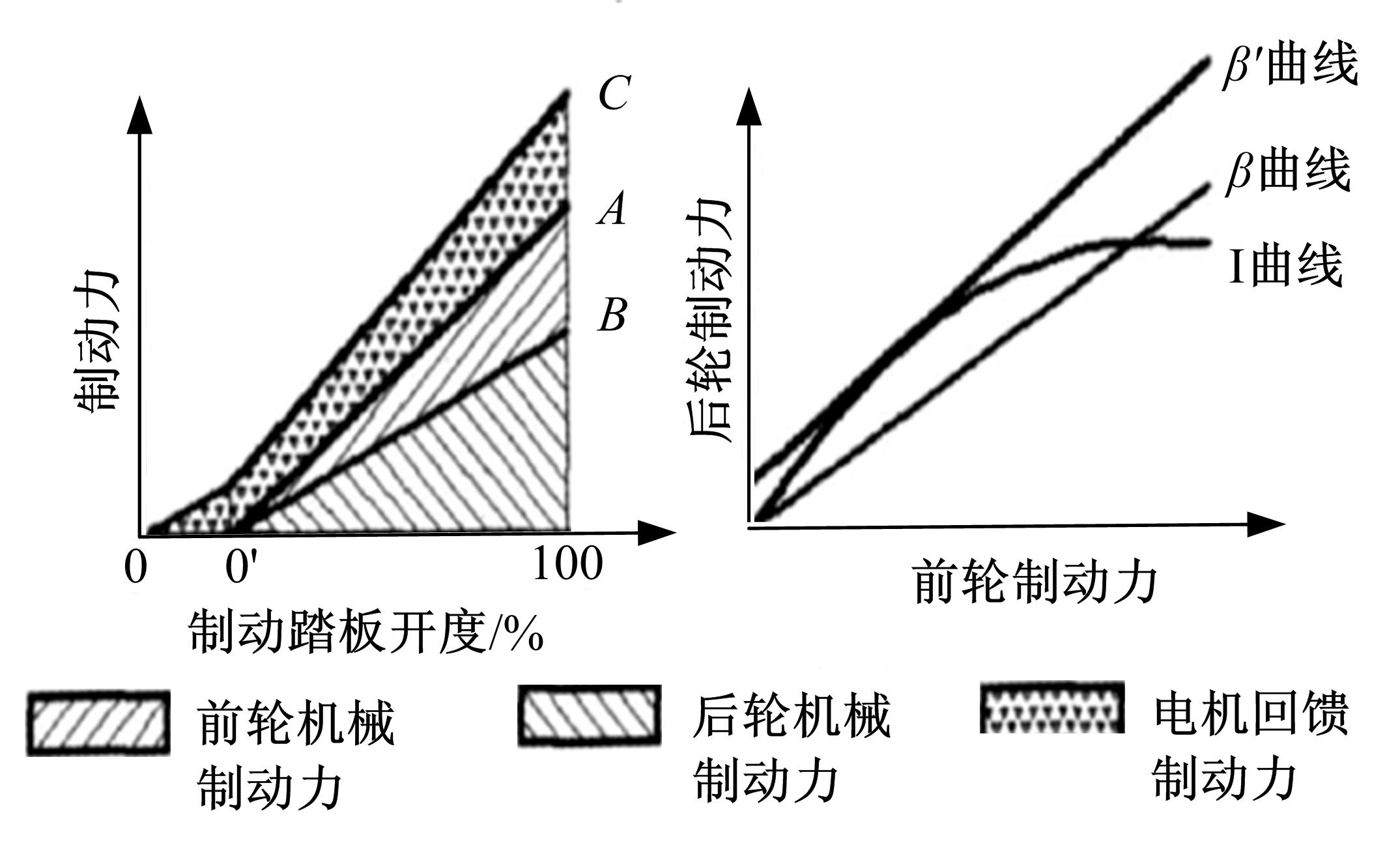 | 图2 并联制动系统控制策略Fig.2 Parallel braking system control strategy |
该控制策略按照理想制动力曲线(即I曲线)进行分配, 当电机可提供的制动力大于等于驱动轴所需的制动力时, 该轴制动力都由电机提供, 而非驱动轴制动力由机械制动器提供; 当电机可提供的制动力小于驱动轴所需的制动力时, 电机提供最大再生制动力, 其余部分由驱动轴的机械制动器提供, 非驱动轴制动力全部由机械制动器提供。
该策略可同时兼顾制动稳定性和能量回收最大化, 对该策略的研究主要集中在仿真阶段, 该策略要求制动操纵机构具有独立精确控制前后轴制动力分配的能力。因市场上现有的电动汽车多为单轴驱动且搭配传统的制动操纵机构, 无法对机械制动系统和再生制动系统单独进行操纵, 故还未得到实际应用。
一直以来, 因电动轮汽车驱动力矩可自由分配, 可以实现力矩矢量控制等传统汽车上很难实现的控制策略, 因此得到了越来越多的关注。
电动轮汽车的4个车轮内均安装有轮毂电机, 且随着电机、电池技术的发展, 再生制动能力有了很大提升, 在中低强度制动时, 轮毂电机及电池系统所能提供的再生制动能力完全可以满足制动要求, 此时可以依据I曲线进行制动力分配, 达到在获得尽可能多的回收能量的同时保证制动稳定性, 中高强度制动下再生制动与机械制动一同工作, 以保障制动强度, 这是电动轮汽车理想的再生制动控制思路, 需要所配备的制动操纵机构具有如下特点:
(1)操纵机构具有较长的液压制动系统空行程, 且在空行程内具有一定的踏板力模拟能力, 以满足低强度时只有再生制动系统工作而机械制动系统不介入工作的需要。
(2)制动操纵机构应具备在一定范围内自由调整液压制动系统压力的能力, 可以在机械制动系统与再生制动系统共同工作时调整二者的制动力分配。
近几年一些科研人员都提出了能够满足以上要求的新能源汽车制动操纵机构[6], 本文选用一种新型的机电复合制动系统制动操纵机构[7]来实现所提出的电动轮汽车再生制动系统控制策略。
图3为电动轮汽车制动系统控制流程, 图4为所提出的控制策略。
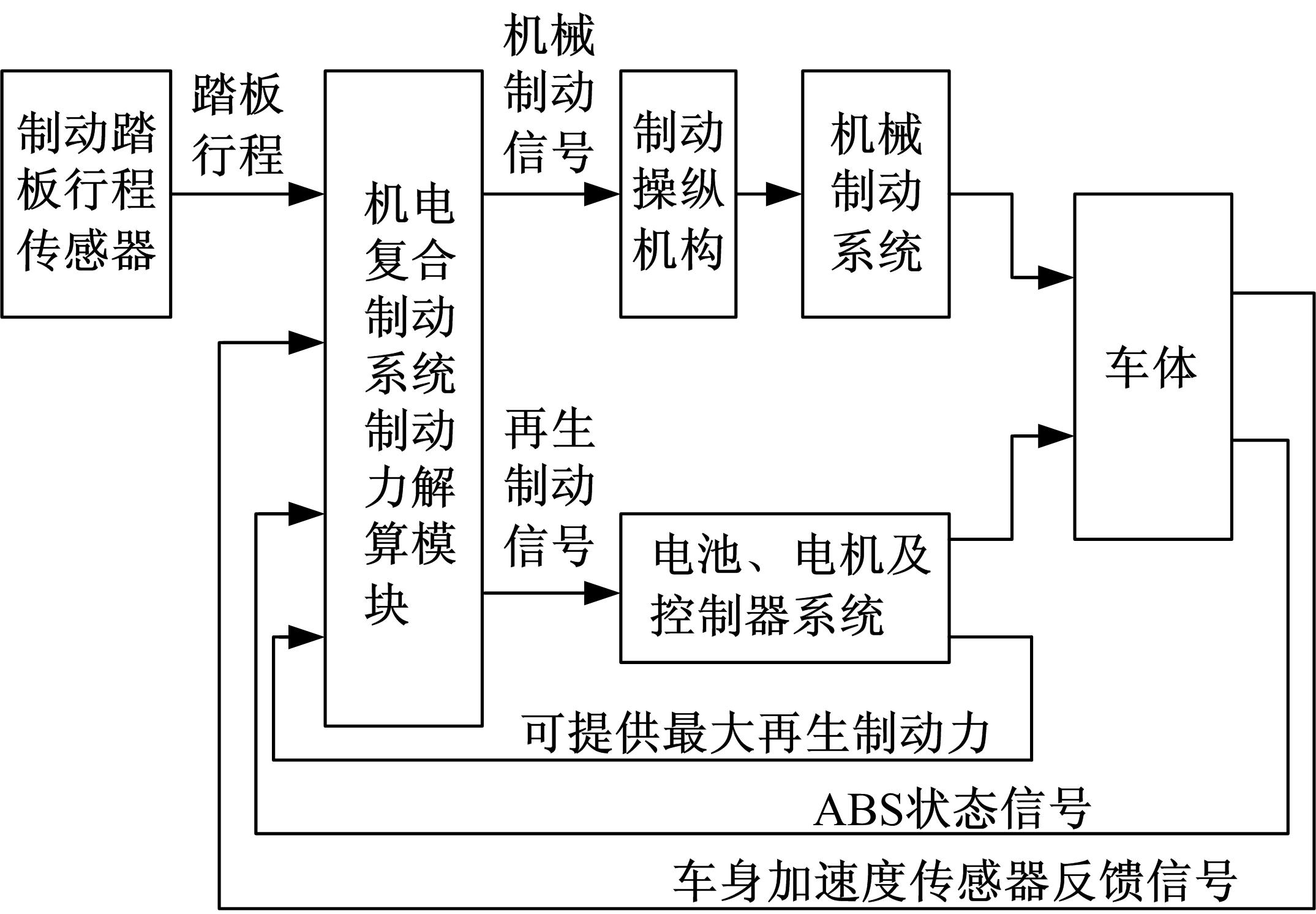 | 图3 电动轮汽车制动系统控制流程Fig.3 Control processes of in-wheel-motor vehicle braking system |
 | 图4 电动轮汽车制动系统控制策略Fig.4 Control strategy for in-wheel-motor vehicle braking system |
本文采用AMESim软件对纯电动汽车、车辆行驶环境及驾驶员模型进行建模。模型中的电池、电机子模型采用查表的方式建立, 相关性能数据由实验获得, 该方法建立的模型使得仿真结果更接近于实际。为对比采用理想再生制动力分配策略的电动轮汽车与采用并行制动力分配策略的普通电动汽车在制动力分配特性、制动稳定性、制动能量回收能力等方面的不同, 上述模型采用表1中的两组参数分别进行仿真, 两种目标车辆具有相同的整备质量、几何参数和电池模型, 以及相近的电机功率, 因此具备可比性。仿真工况采用NEDC标准工况。
| 表1 仿真参数 Table 1 Simulation parameter |
按照前面制定的机电复合制动分配策略以及仿真模型, 采用NEDC工况进行了A、B车型的仿真对比。
图5为两种车型的机电复合制动制动力矩分配曲线, 由图5(a)可以明显看出, 因NEDC工况中制动强度偏小使得A车型在很多情况下制动踏板开度未超过踏板空行程, 此时只有再生制动工作而机械制动并未工作; 图5(b)中B车型因采用并行制动控制策略, 并且仅使用传统的制动操纵机构, 只有很少的制动踏板空行程, 故B车型再生制动与机械制动都是同时介入工作。
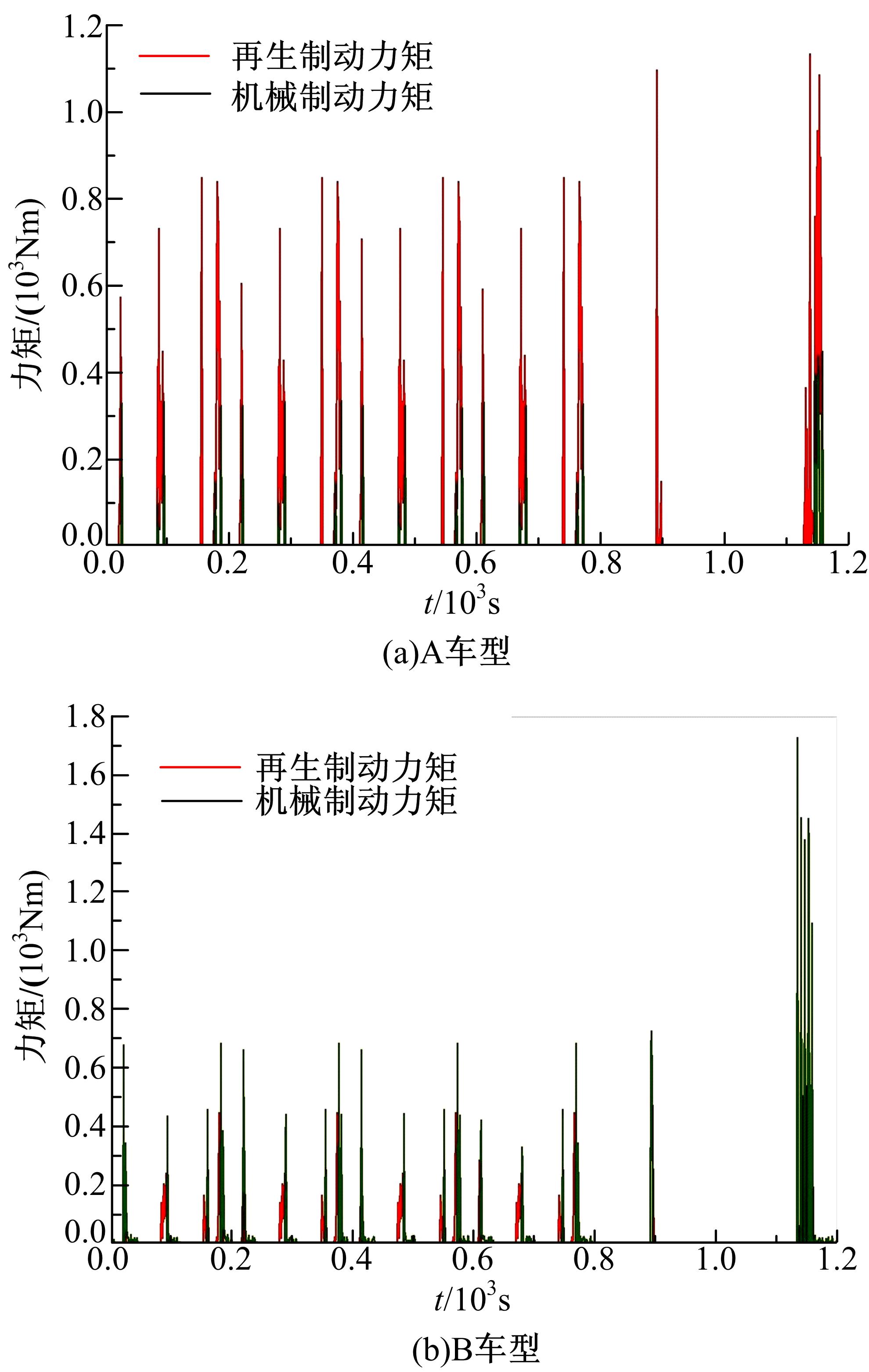 | 图5 机械制动、再生制动制动转矩分配对比Fig.5 Contrast on braking torque distribution of mech anical braking and regenerative braking |
图6为前、后车轮制动力分配的仿真结果。A车型和B车型的前轮制动力矩需求要大于后轮, 但B车型只有前车轮具有再生制动能力, 因此前轮制动力矩与后轮制动力矩的差值较A车型更加明显。
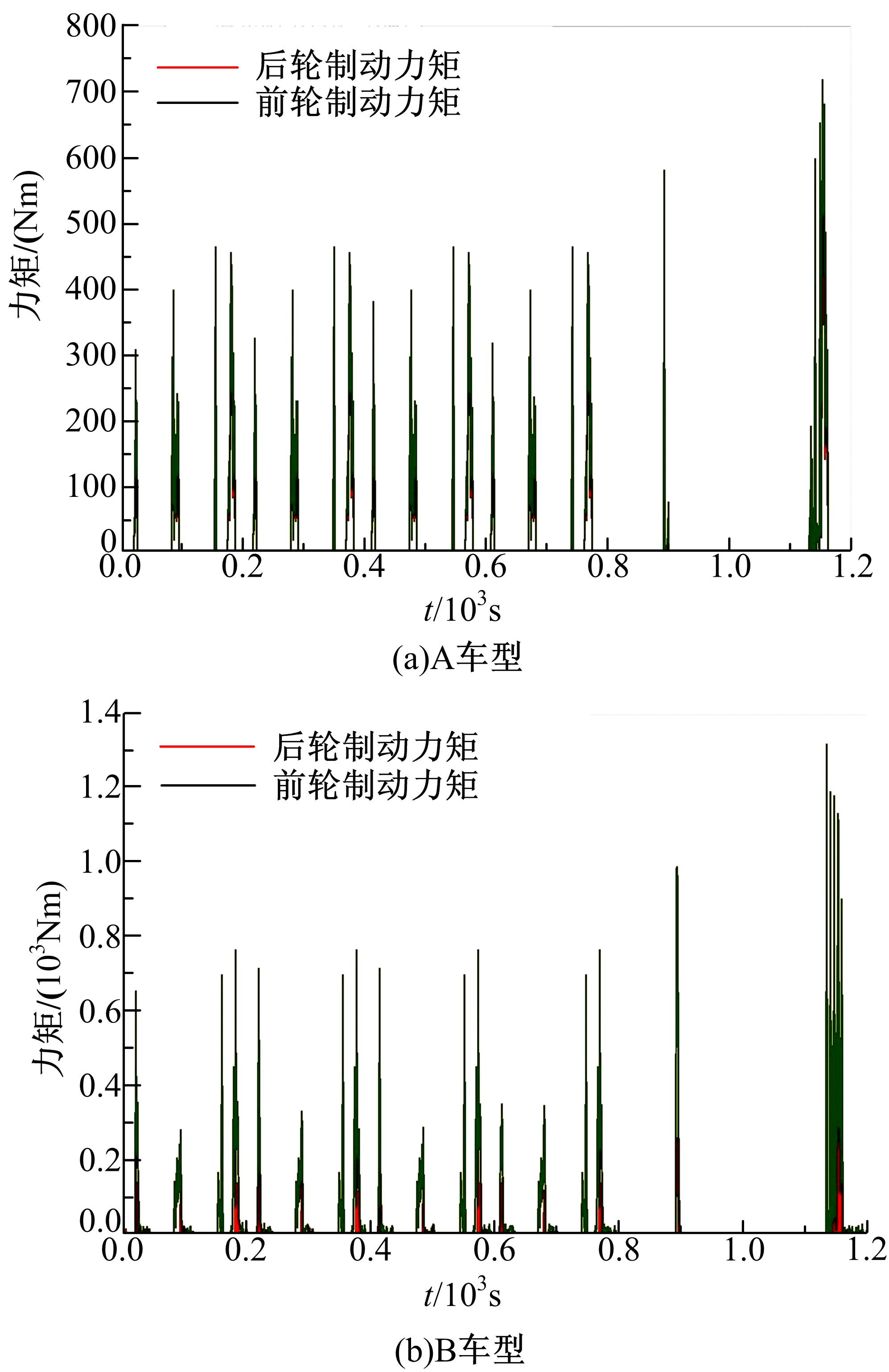 | 图6 前、后车轮总制动力矩分配对比Fig.6 Contrast on total braking torque distribution of front wheels and rear wheels |
实际制动力矩的分配与理想制动力分配曲线的对比如图7所示。该图能更加鲜明地反映A、B车型在前、后车轮制动力分配特点及制动稳定性方面的区别。图7(a)中, A车型的实际制动力分配始终跟随I曲线, 与I曲线贴合较好; 图7(b)中, B车型的实际制动力分配明显在I曲线之下, 并且与I曲线距离较远, 说明A车型具备明显优于B车型的制动力分配特性及制动稳定性。
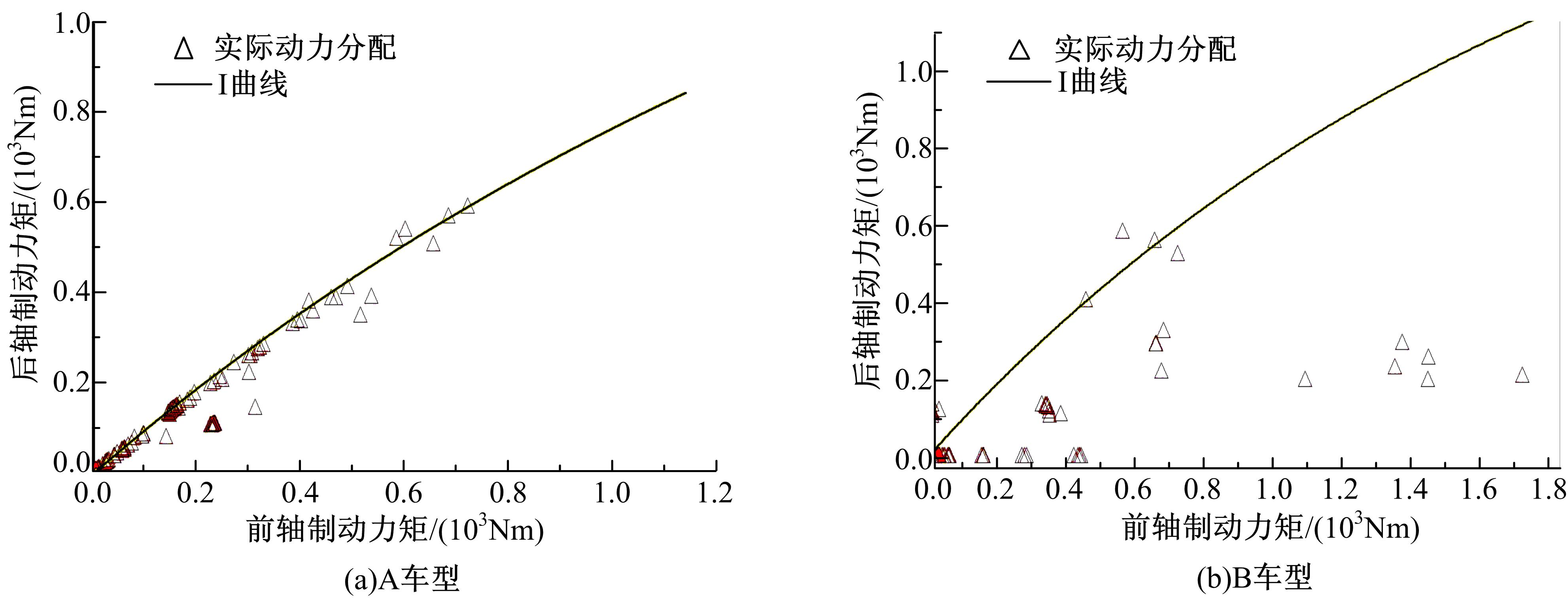 | 图7 实际前、后车轮制动力矩分配情况Fig.7 Actual distribution of the front and rear braking torque |
图8为一个NEDC循环中不同车型的电池SOC变化曲线。仿真初始时的电池SOC设置为100%, 一个NEDC循环终了时, A车型SOC为95.50%, B车型SOC为94.58%, 若关闭再生制动功能, 两个车型的SOC在仿真结束时均为93.57%。A车型的制动能量回收率为30.02%, B车型的制动能量回收率则为15.71%。可以看出, 在NEDC这种以中低强度为主的工况中, 采用理想制动力分配策略的A车型, 其制动能量回收能力明显高于B车型。
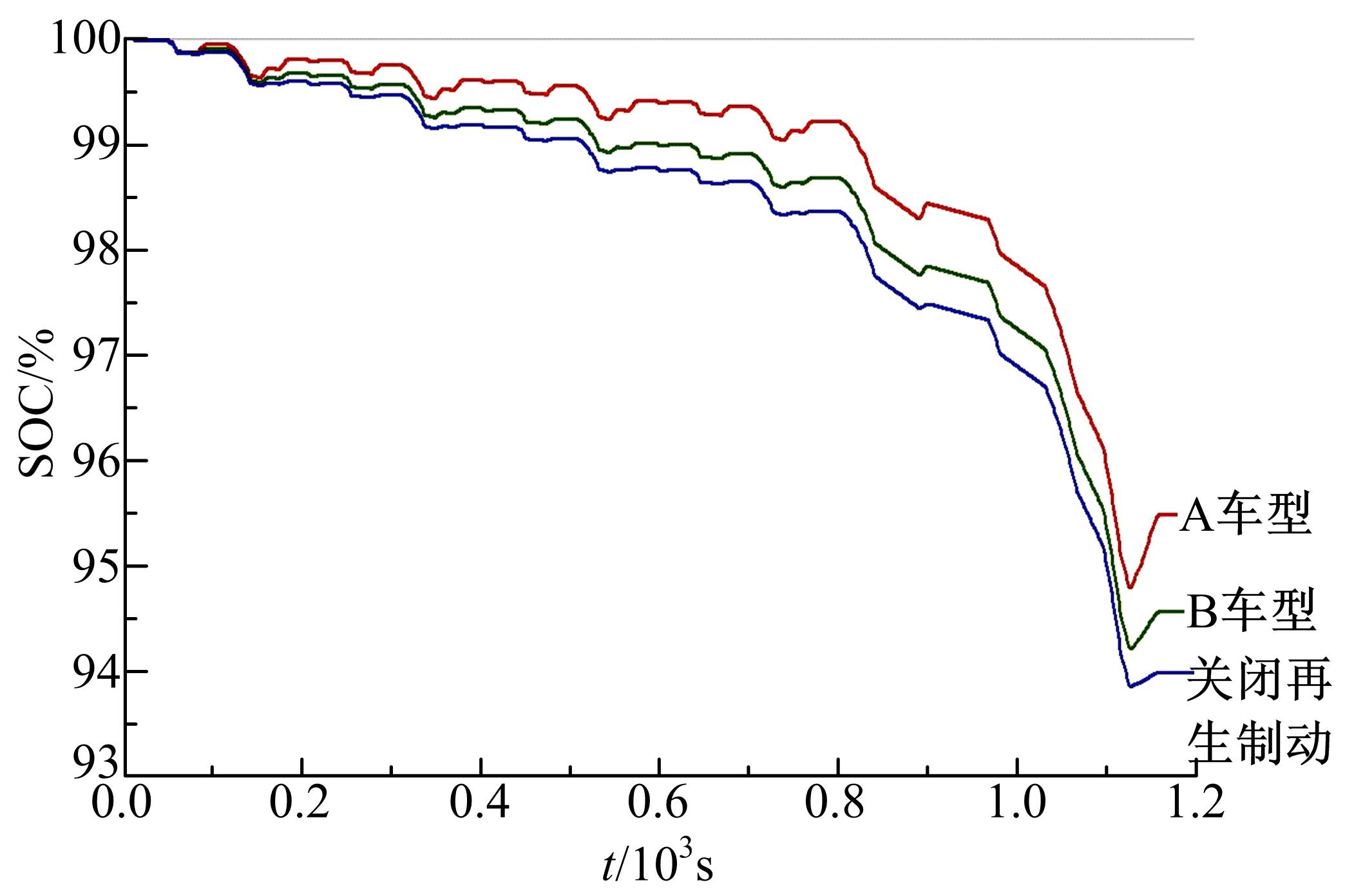 | 图8 SOC仿真结果Fig.8 Simulation result of SOC |
提出了适用于电动轮汽车的制动系统控制策略, 通过对搭载该控制策略的电动轮汽车模型进行仿真, 验证了其较使用传统并行控制策略的电动汽车在能量回收比例方面具有很大优势, 且该策略使电动轮汽车的制动力分配接近于理想制动力分配曲线, 具有很好的制动稳定性。实现该策略所使用的制动操纵机构较传统制动操纵机构改动很小, 容易实现, 且在节能和行驶稳定性方面优势明显, 是电动轮汽车再生制动系统比较理想的控制策略解决方案。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|