



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于电控液压制动系统的车辆稳定性控制策略
[李寿涛1  , 马用学
, 马用学1 , 郭鹏程1 , 宗长富2 , 张浩3 ]
, 马用学]
|
|


李寿涛(1975-),男,副教授,博士.研究方向:智能机械及机器人多智能体行为协调与控制,汽车系统动力学与控制.E-mail:list@jlu.edu.cn
针对带有电控液压制动(EHB)系统的乘用车进行研究,提出了一种新的稳定性控制策略。首先利用模糊推理的方法分别对横摆角速度偏差和质心侧偏角速率的门限值进行确定,然后利用逻辑门限PI控制方法计算出附加横摆力矩,最后在EHB系统上对附加横摆力矩加以实现。另外,还采用模糊PI自整定算法对EHB系统轮缸的目标压力进行优化控制。仿真及实验结果表明:模糊PI自整定算法在EHB的整个工作区段都具有良好的控制效果;当车辆在转向过程中失去稳定时,本文所提出的控制策略能够及时地对车辆进行稳定性控制,提高了车辆在行驶过程中的安全性。
This paper presents a strategy of vehicle stability control based on the Electric Hydraulic Braking (EHB) system of the vehicle. First, the yaw rate deviation and the mass-centre sideslip angle rate threshold are determined using fuzzy inference methods. Then, the logic threshold PI control method is used to calculate the additional yawing moment. Finally the additional yawing moment is realized on the EHB system. In addition, the fuzzy PI self-tuning algorithm is used to optimize the control of the target pressure of the wheel cylinder of EHB system. Simulation and experiment results show that the fuzzy PI self-tuning algorithm can obtain good control effect in the whole working section of EHB system. When the vehicle loses stability in steering, the control strategy can implement corrective action in time to improve the safety of the vehicle.
随着汽车技术的快速发展以及道路交通设施的改善, 使得交通安全问题也变得日益紧迫, 而制动系统作为保证汽车安全的重要组成部分, 对提升车辆主动安全性有非常重要的地位[1]。由于传统制动系统在结构和原理上的限制, 使其在提高制动性能方面潜力有限[2]。随着技术的不断进步, 出现了在硬件结构和执行性能上优于传统制动系统的线控制动, 主要包括电控液压制动系统(EHB)和电控机械式制动系统(EMB)[3, 4]。本文所研究的内容及相关实验研究就是在EHB系统上进行的。
目前已有大量的学者对带有传统制动系统的车辆行驶过程中的横摆稳定性控制进行了研究。文献[5]以横摆角速度和质心侧偏角为控制变量, 利用PID控制器计算出附加横摆力矩, 最后通过差动制动的方式实现车辆的稳定性控制。文献[6]提出以线性二自由度车辆操纵特性模型为控制目标, 采用线性二次型调节器(LQR)方法进行了汽车横摆力矩的决策, 计算出附加横摆力矩。文献[7]采用联合逻辑门限与PID控制的方法获得附加横摆力矩, 其控制器可以通过逻辑阈值去调节PID控制器的参数。另外, 也有学者[8]对于EHB系统的稳定性控制进行了相关的研究。
本文针对带有电控液压制动系统(EHB)的乘用车进行研究, 提出了稳定性控制策略。首先利用模糊推理的方法对横摆角速度偏差和质心侧偏角速率的门限值进行确定, 然后利用逻辑门限PI控制方法计算出附加横摆力矩, 最后通过EHB系统实现附加横摆力矩。此外, 本文还针对EHB系统中轮缸压力的跟随特性进行了研究, 采用模糊PI自整定算法对EHB系统轮缸的目标压力进行优化控制。
图1为理想二自由度车辆模型, 由其动力学方程可知, 向心加速度可通过下式计算:

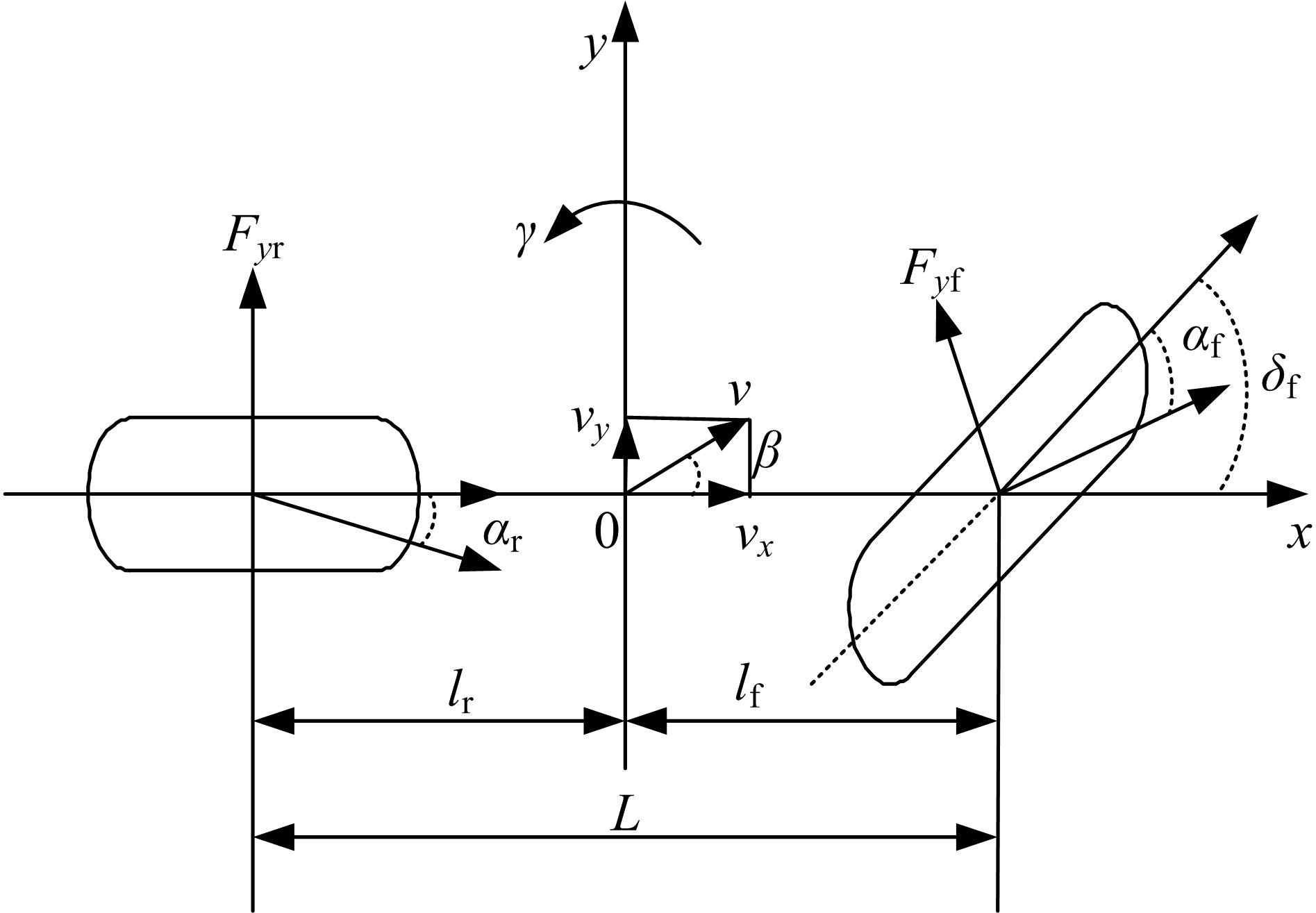 | 图1 理想二自由度车辆模型Fig.1 Ideal two DOF vehicle model |
图1和式(1)中: 



由式(1)可得到 





由参考模型可以获得车辆理想横摆角速度 
式中: 

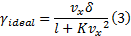
另外, 由于侧向加速度受到轮胎-地面附着系数的限制, 则横摆角速度的上限 

式中: 
联合式(3)(4)可知, 定义理想横摆角速度为:

车辆在高速或低附着系数路面工况下进行转向操作时, 很容易出现转向不足或过度转向的情况, 导致车辆的不稳定[9]。
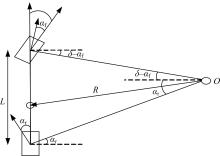
为了分析车辆在转向过程中的不稳定性, 需要对车辆的转向模型进行研究, 获得车辆转向过程中车轮的侧偏特性。本文利用文献[10]中理想二自由度车辆模型的侧偏角与横摆角速度之间的线性关系得到车辆的转向特性。图2为车辆在转向过程中的转向模型。车辆的瞬时转向中心 





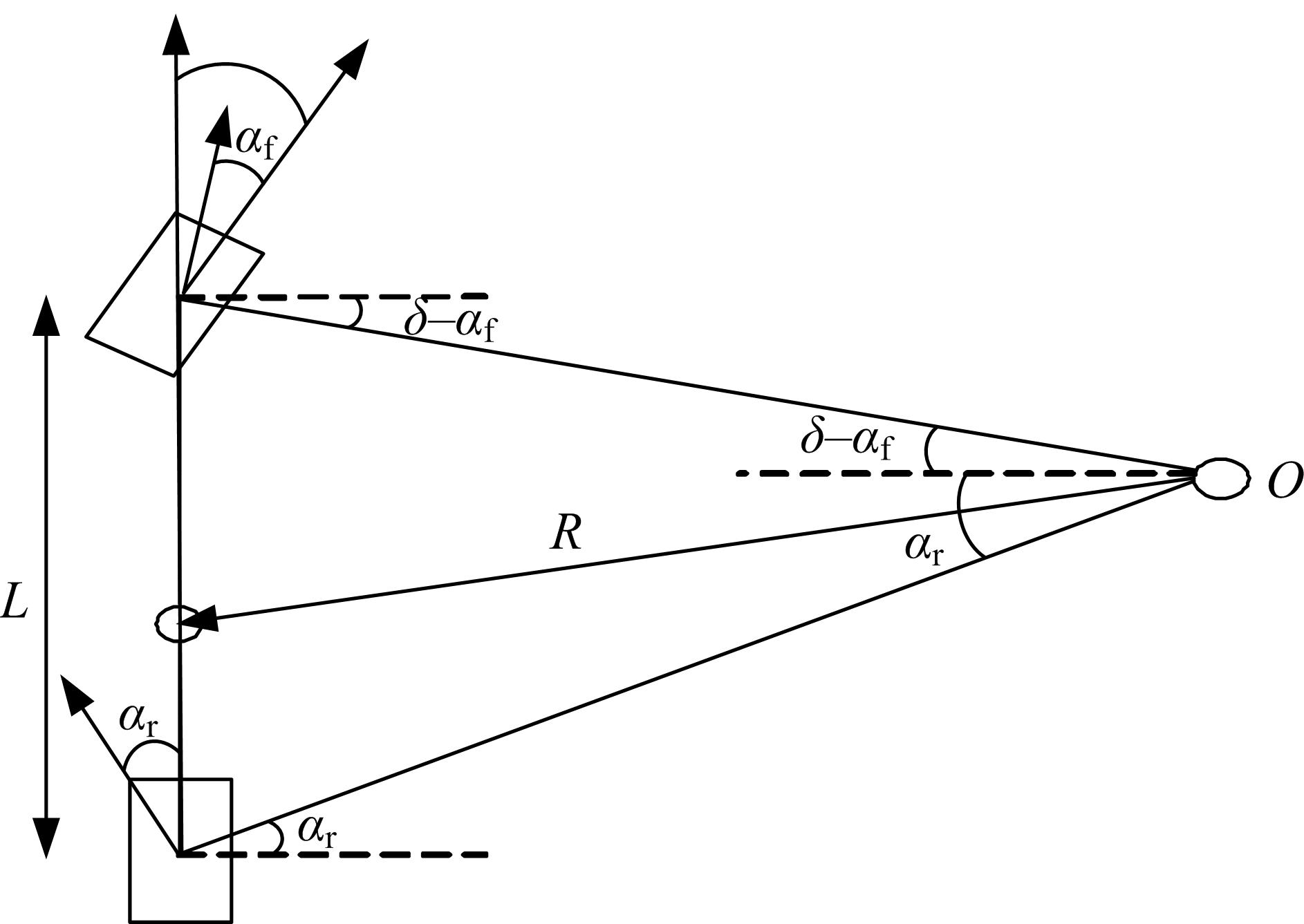 | 图2 车辆转向模型Fig.2 Vehicle steering model |
设Δ γ 为理想横摆角速度与实际横摆角速度的差值, Δ γ =γ _NO-γ , 则当 


利用横摆角速度的偏差以及质心侧偏角速率判断车辆行驶的实际路径是否与期望路径一致, 当车辆行驶路径偏离理想路径一定程度时, 控制系统对车辆施加控制以保持车辆的行驶稳定。对于附加横摆力矩的计算, 本文利用模糊推理的方法确定横摆角速度偏差和质心侧偏角速率的门限值, 再利用逻辑门限PI控制方法计算出附加横摆力矩。
2.1.1 控制变量有效值的计算
有效横摆角速度偏差 






在不同的工况下为了使车辆的横摆稳定性控制系统能够充分有效而又不过于敏感地进行稳定性控制, 就要针对不同的汽车运动状态以及驾驶员操作设计不同的门限值 




因此, 可根据方向盘转角速率和路面附着系数与横摆角速度的关系, 利用模糊逻辑推理的方法对门限值Δ γ th进行确定。该模糊控制器以方向盘转角速率绝对值和路面附着系数作为输入量, 以门限值Δ γ th作为输出量。模糊控制器的模糊逻辑规则如表1所示。
| 表1 确定门限值Δ γ th的模糊逻辑规则 Table 1 Fuzzy rule for Δ γ th |
此外, 质心侧偏角变化率的有效值 




| 表2 确定β th门限的模糊逻辑规则 Table 2 Fuzzy rule for β th |
2.1.2 附加横摆力矩计算及其实现
本文选择PI控制的方法进行附加横摆力矩 

式中: 
车辆稳定性所需要的附加横摆力矩是通过EHB系统调节四个轮缸制动压力来实现的。针对四个车轮独立制动时所产生附加横摆力矩的效率不同, 本文选用单轮差动制动方式进行横摆稳定性控制。由于轮间压力分配和EHB系统不是本文的重点, 这里不作详细论述。
对于附加横摆力矩所对应的轮缸制动压力计算, 本文不考虑车轮滑移率以及踏板制动等因素的影响, 直接根据决策出的 

式中: 




EHB系统的某些物理器件结构上的非线性特性决定了系统工作点不同时会导致系统的传递函数发生变化。而这种变化又不能对其进行精确建模, 使得系统的动态响应不能用简单的模型表达出来, 因此控制时不仅控制器的参数要做相应地改变, 而且可能控制器的结构在某些时候都需要做相应地调整和改变。因此, 这里使用模糊PI算法对EHB系统的轮缸目标压力进行优化控制。
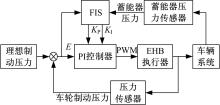
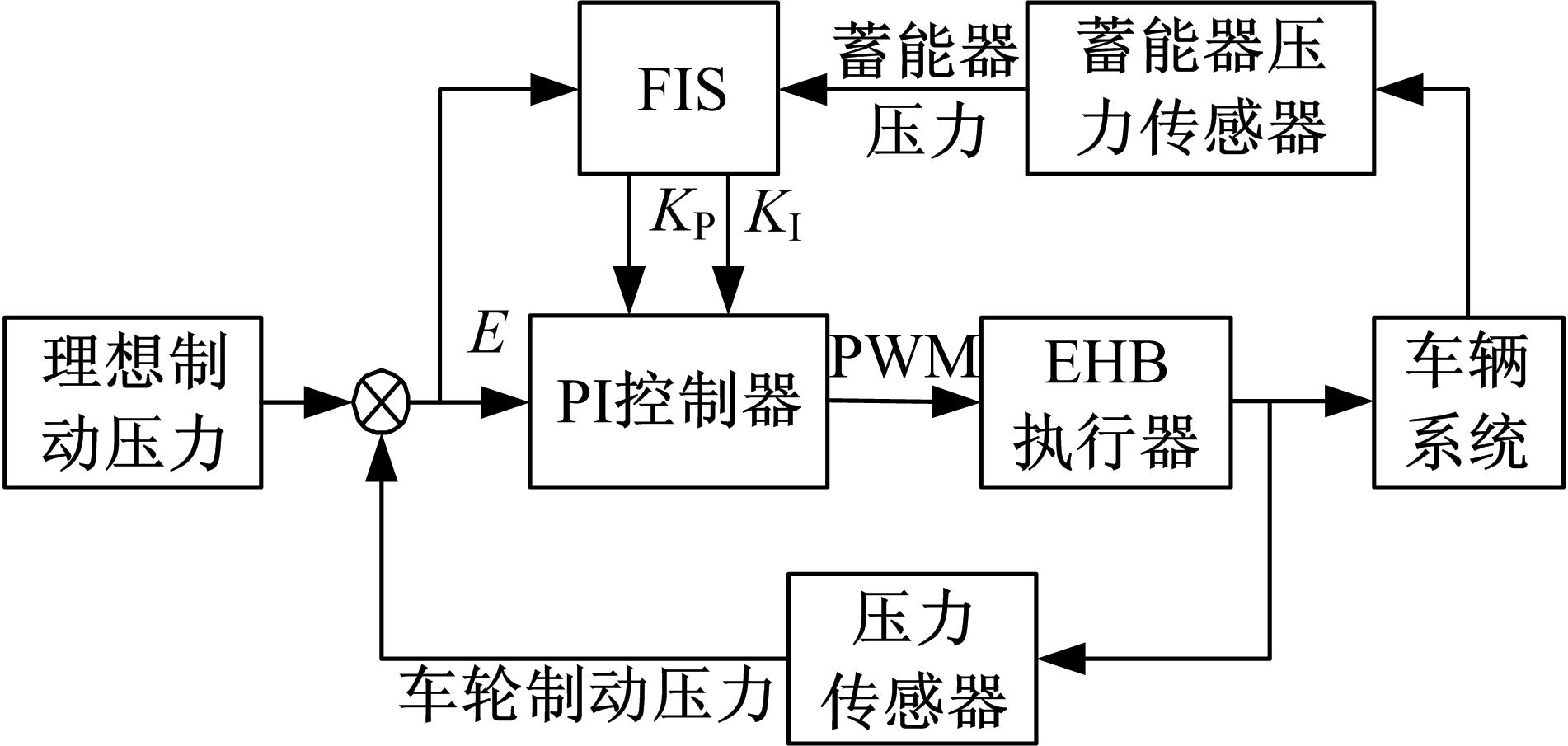 | 图3 轮缸压力控制策略Fig.3 Wheel cylinder pressure control strategy |
轮缸压力控制策略如图3所示, 模糊PI控制器的输入量为:目标轮缸压力 



对于模糊PI自整定控制, 采用三角形隶属度函数对输入变量进行模糊化, 用重心法对输出变量进行解模糊。为了能够达到良好的压力控制效果, 在参数整定实验基础上, 建立了模糊 
| 表3 KP和KI模糊推理规则表 Table 3 Fuzzy rules for KP and KI |
在利用AMESim搭建EHB系统的液压调节器模型的基础上, 为验证理想制动力跟踪算法的有效性, 分别以阶跃信号和电子制动踏板获得的制动信号作为轮缸的目标压力。
图4为以6 MPa的阶跃信号作为目标压力得到的实验仿真结果。图中压力响应曲线的超调量很小, 而且响应速度快。
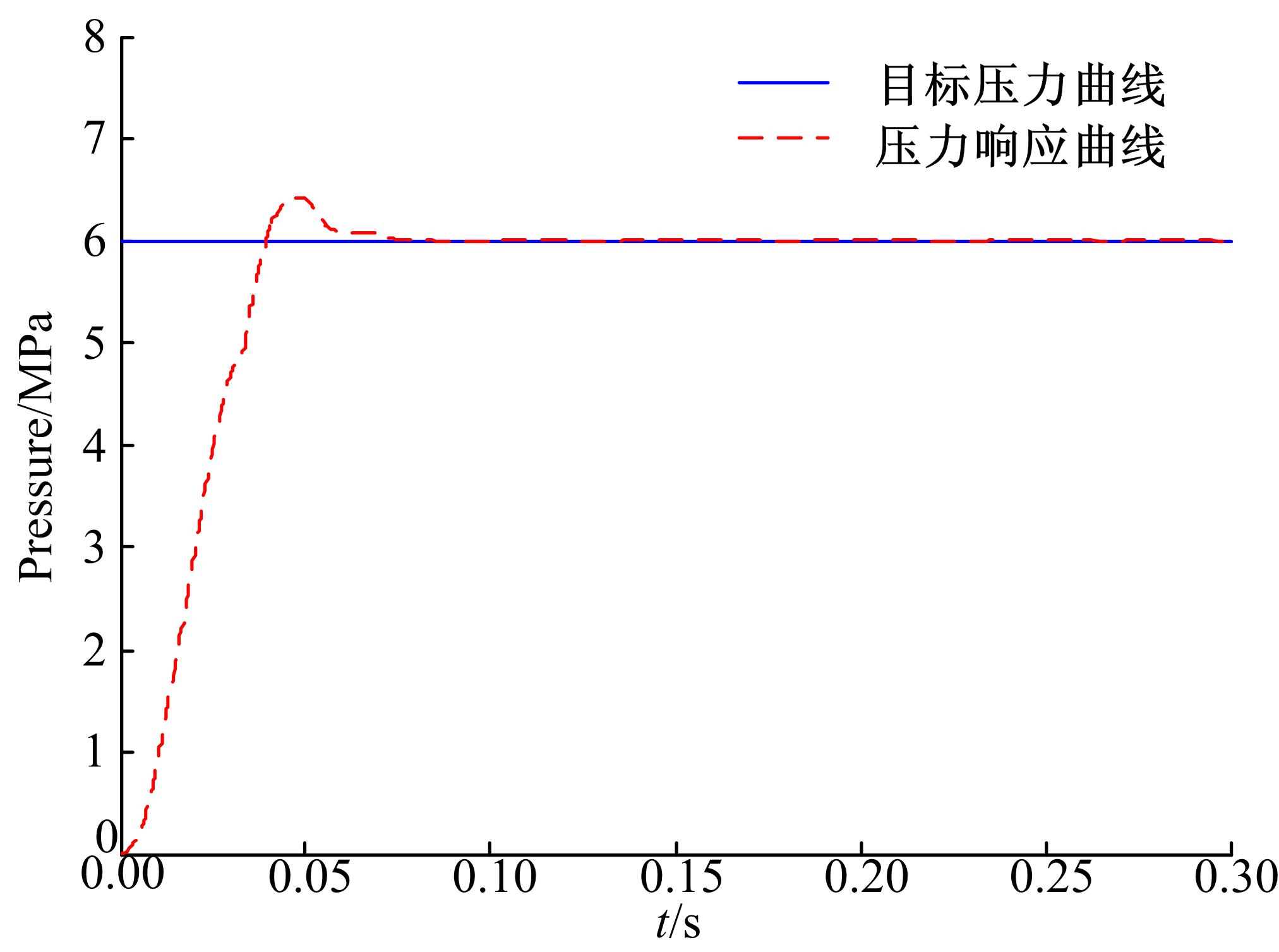 | 图4 制动力阶跃输入下的压力曲线Fig.4 The pressure curve with braking force step input |
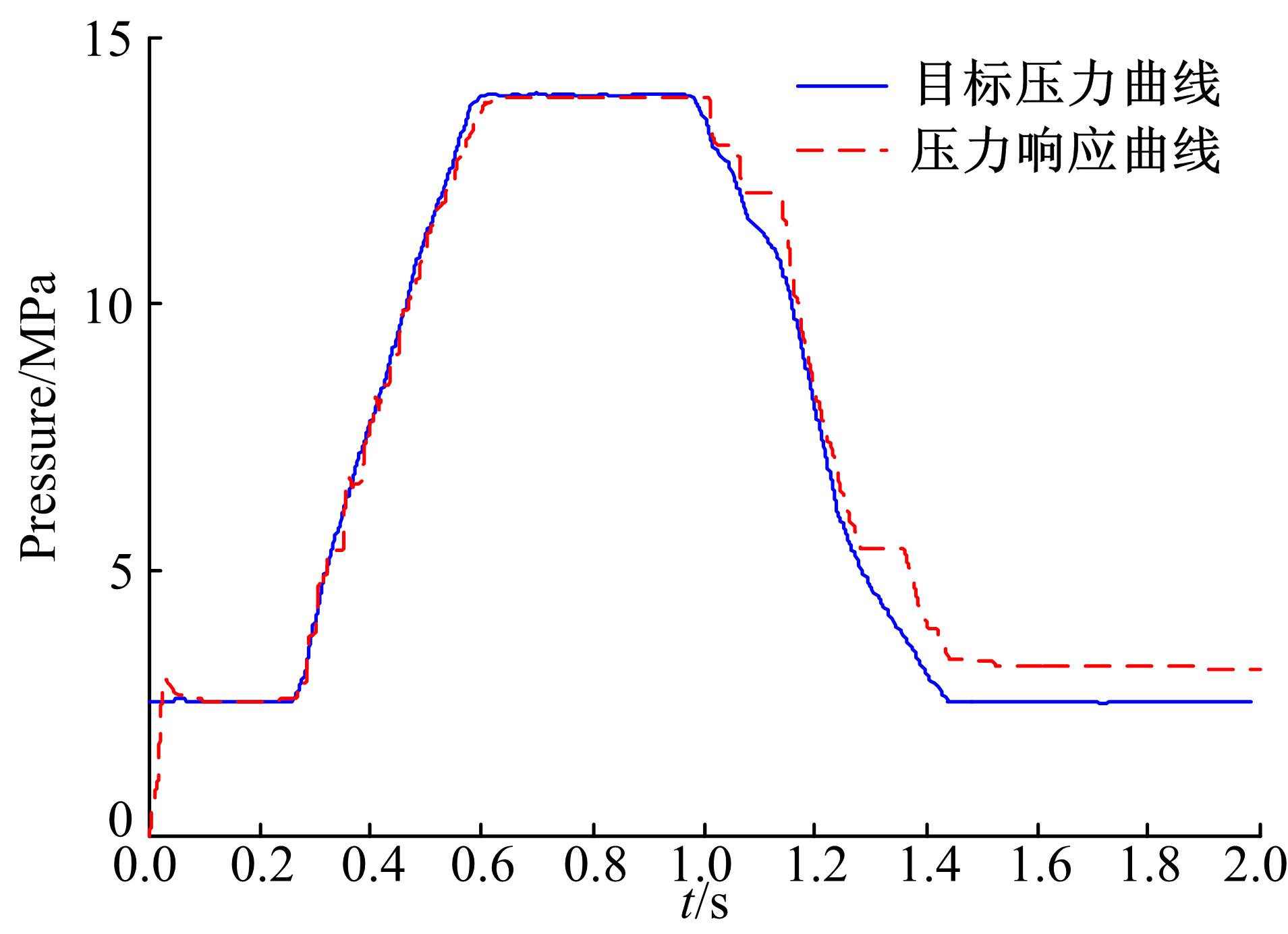 | 图5 电子踏板制动信号输入下的压力曲线Fig.5 The pressure curve with electronic pedal brake pressure input |
图5为以制动信号作为目标压力值得到的实验仿真结果, 可看出模糊PI控制器具有很强的跟踪能力, 能够很好地实现轮缸压力对目标信号的随动功能。因此, 在模糊PI控制器的控制下, 对于目标压力的响应特性具有很好的效果。
为了进一步验证压力跟随算法的有效性, 在搭建的硬件在环试验台上进行了硬件在环试验研究。所建立的硬件在环试验台由液压供给单元, 制动踏板单元、电控单元、液压控制单元及车辆道路模拟单元等几部分构成。
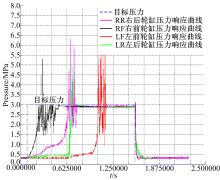
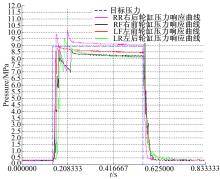
为了验证控制器在EHB的整个工作区段都具有良好的控制效果, 分别针对低压段3 MPa以及高压段9 MPa给定阶跃信号, 四个轮缸进行独立制动, 此时EHB系统的阶跃响应如图6所示。由图中可知, 不考虑传感器噪声的影响, EHB系统的上升时间在0.03~0.8 s内, 稳态误差可以控制在0.03~0.085内, 取得了很好的动态响应效果以及较佳的稳态特性。
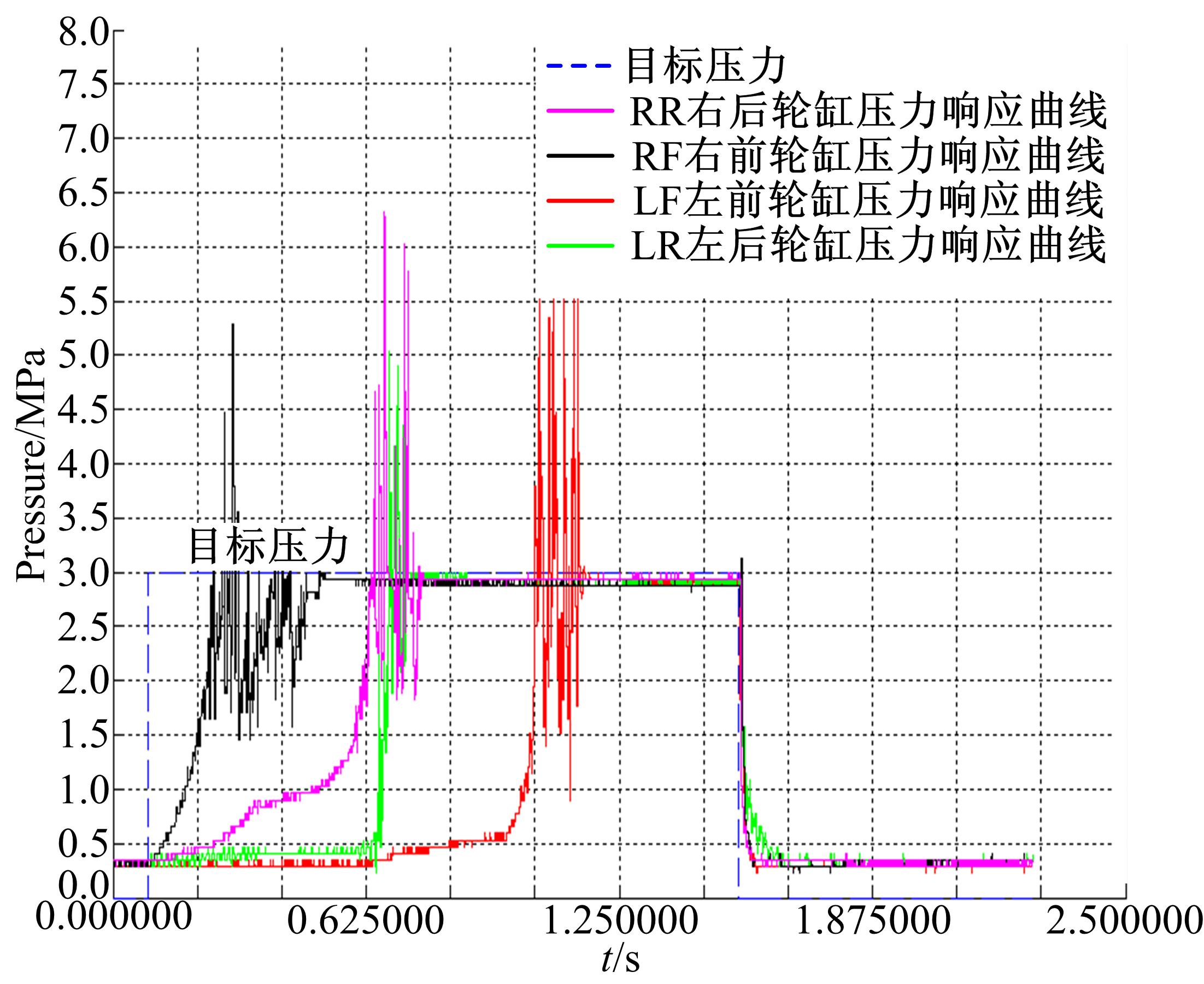 | 图6 四轮独立制动时的EHB系统轮缸压力阶跃响应曲线(a)参考输入为3 MPaFig.6 Step response curve of wheel cylinder pressure of EHB system with four wheel independent brake |
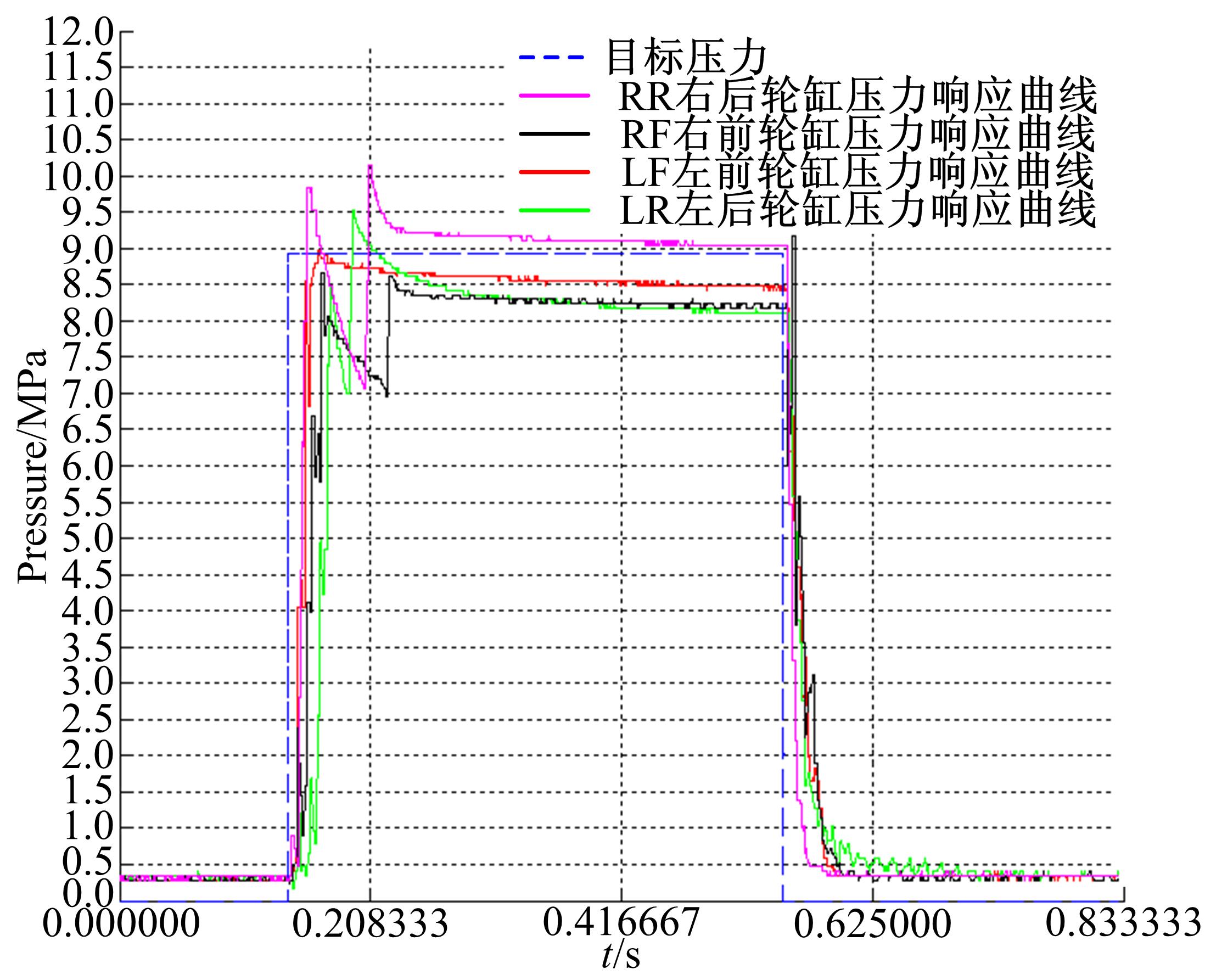 | 图6 四轮独立制动时的EHB系统轮缸压力阶跃响应曲线(b)参考输入为9 MPaFig.6 Step response curve of wheel cylinder pressure of EHB system with four wheel independent brake |
当踏板给出不同区段不同梯度的斜坡信号时, 对EHB系统四轮独立制动。测量四轮轮缸压力跟踪响应曲线如图7所示。由图7可知, 所设计的控制器能够在很短时间内跟随上斜坡信号, 具有非常好的跟踪能力, 并且波形稳定。
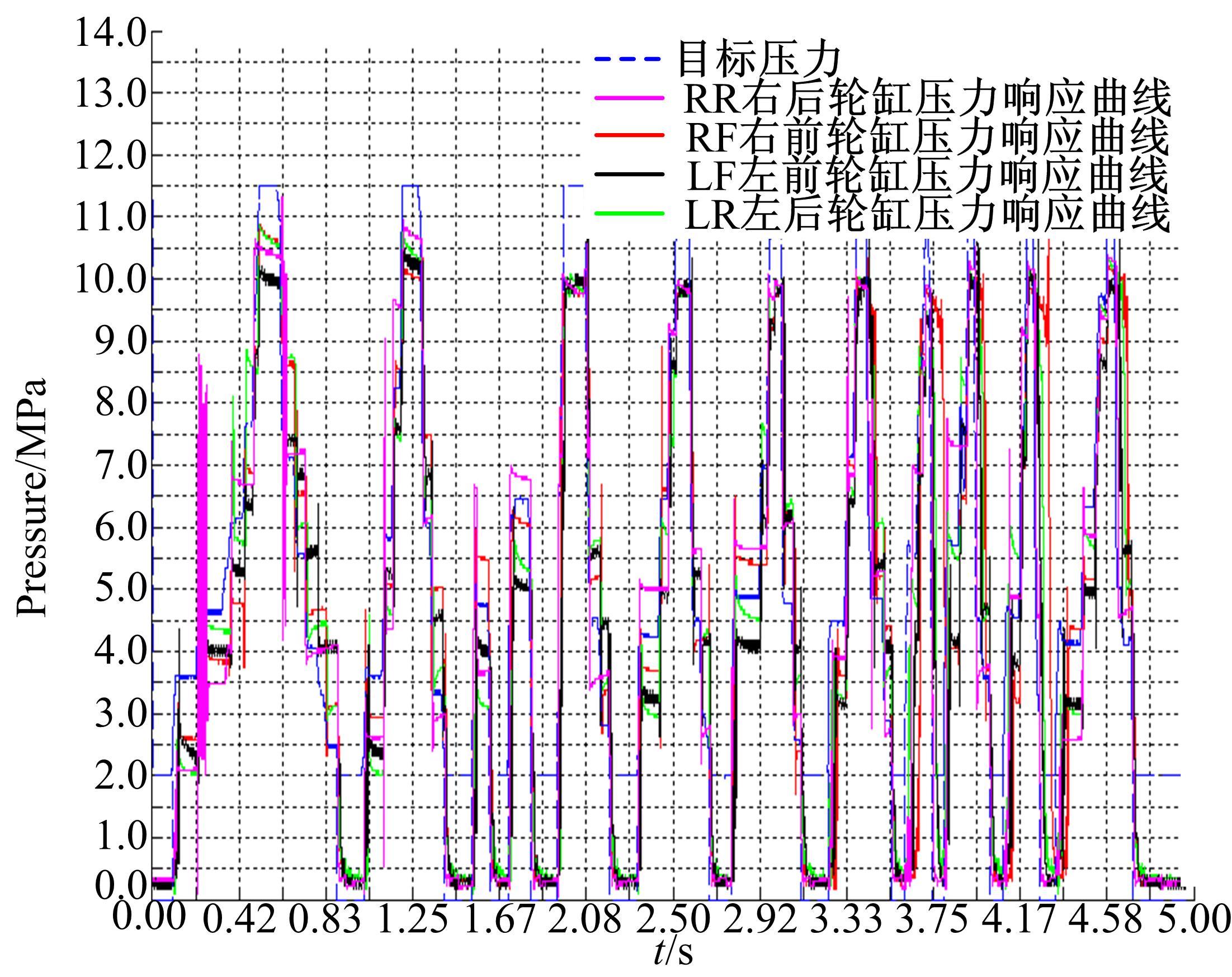 | 图7 不同梯度斜坡信号作用下四轮轮缸压力 跟随响应曲线Fig.7 The following response curve of four wheel cylinder pressure under the action of different ramp signals |
采用紧急双移线ISO3888-1∶ 1999[13]的工况进行仿真实验, 利用CarSim自带的驾驶员模型按照上述双移线工况进行人-车-路的闭环仿真, 并设定初始车速为85 km/h, 路面附着系数为0.4。
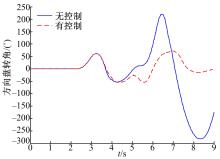
图8为双移线实验的方向盘转角。由图中可知, 车辆无稳定性控制时比带有稳定性控制时的前轮转角大, 在第6秒之后方向盘转角发生剧烈变化, 并且导致车辆失稳不可控制。
 | 图8 方向盘转角对比Fig.8 Steer angle comparison |
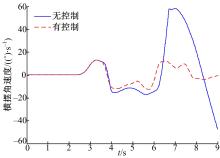
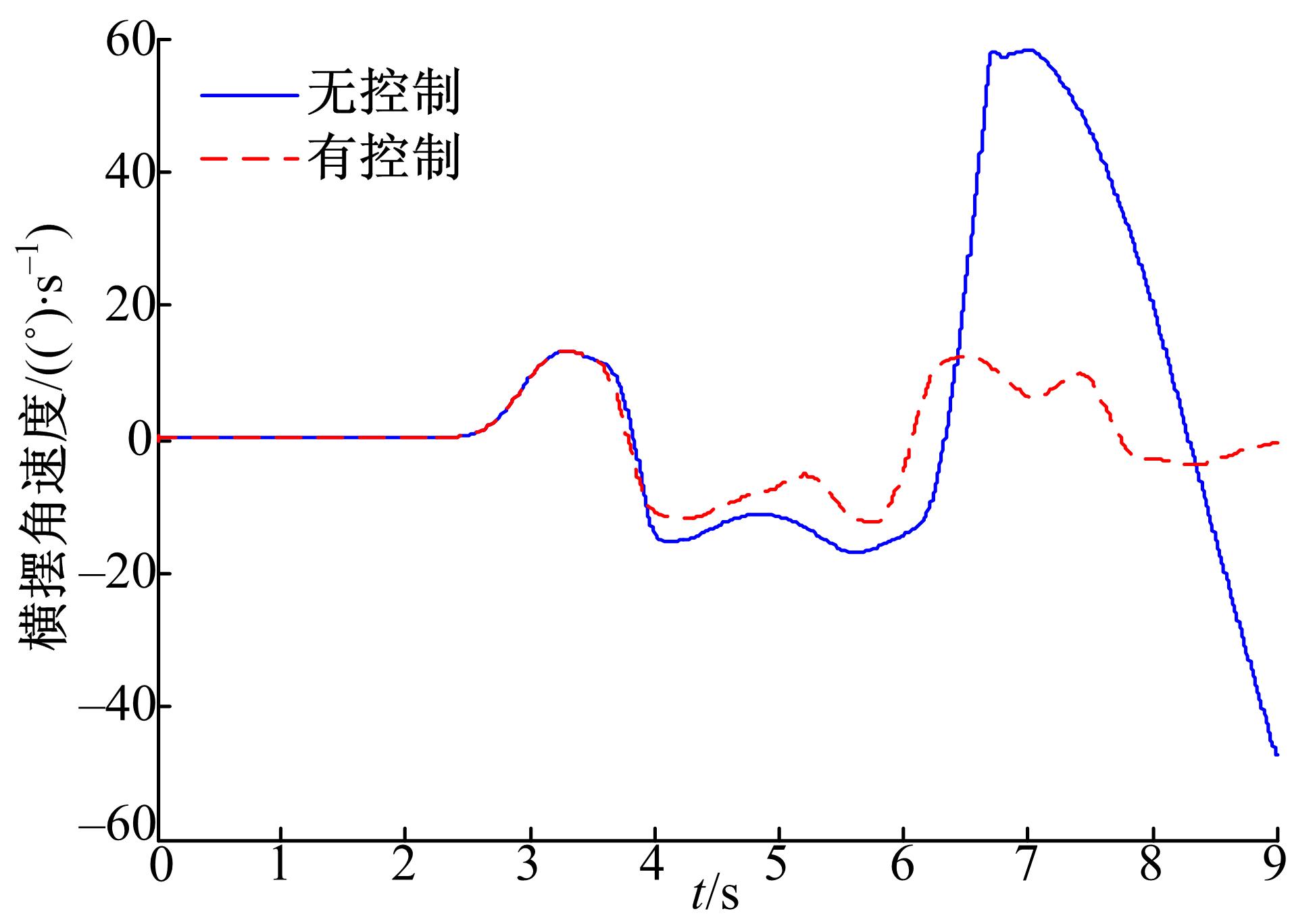 | 图9 横摆角速度对比Fig.9 Yaw rate comparison |
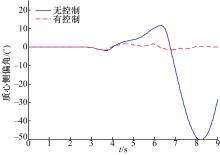
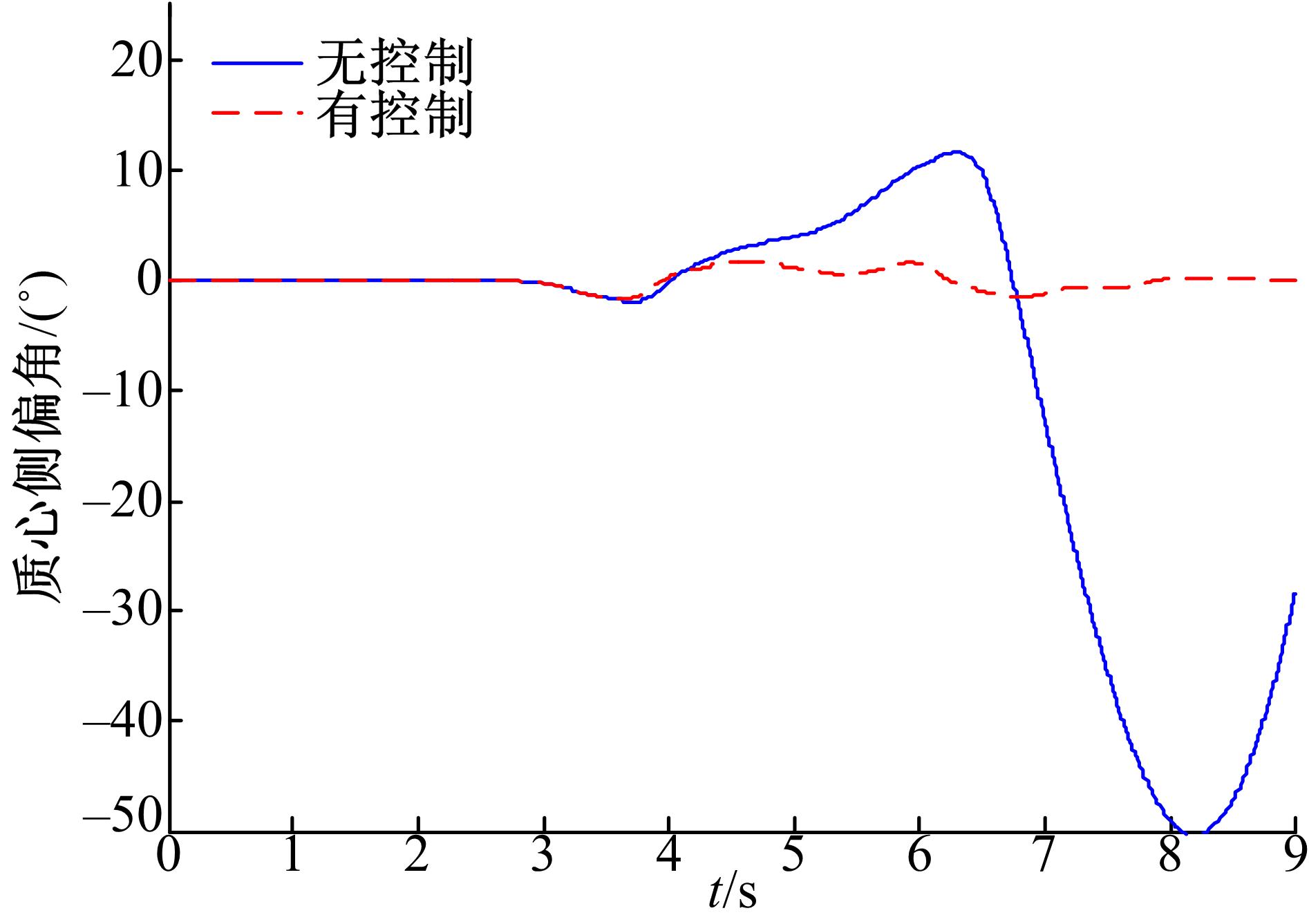
图9和图10分别为横摆角速度和质心侧偏角对比。在不施加横摆稳定性控制时, 从图9可知, 车辆横摆角速度的最大值约为60 ° /s, 严重偏离了理想的横摆角速度; 由图10可知, 质心侧偏角最大值达到了50° , 车辆严重失稳。即当车辆无控制时的横摆角速度和质心侧偏角都分别有急剧增大的趋势, 车辆发生失稳。而当车辆加入稳定性控制时, 车辆的横摆角速度能够跟踪理想横摆角速度, 且质心侧偏角能够保持在很小的范围内, 车辆能够保持稳定状态。
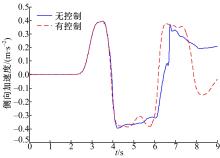
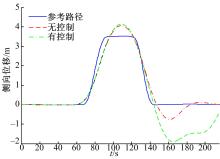
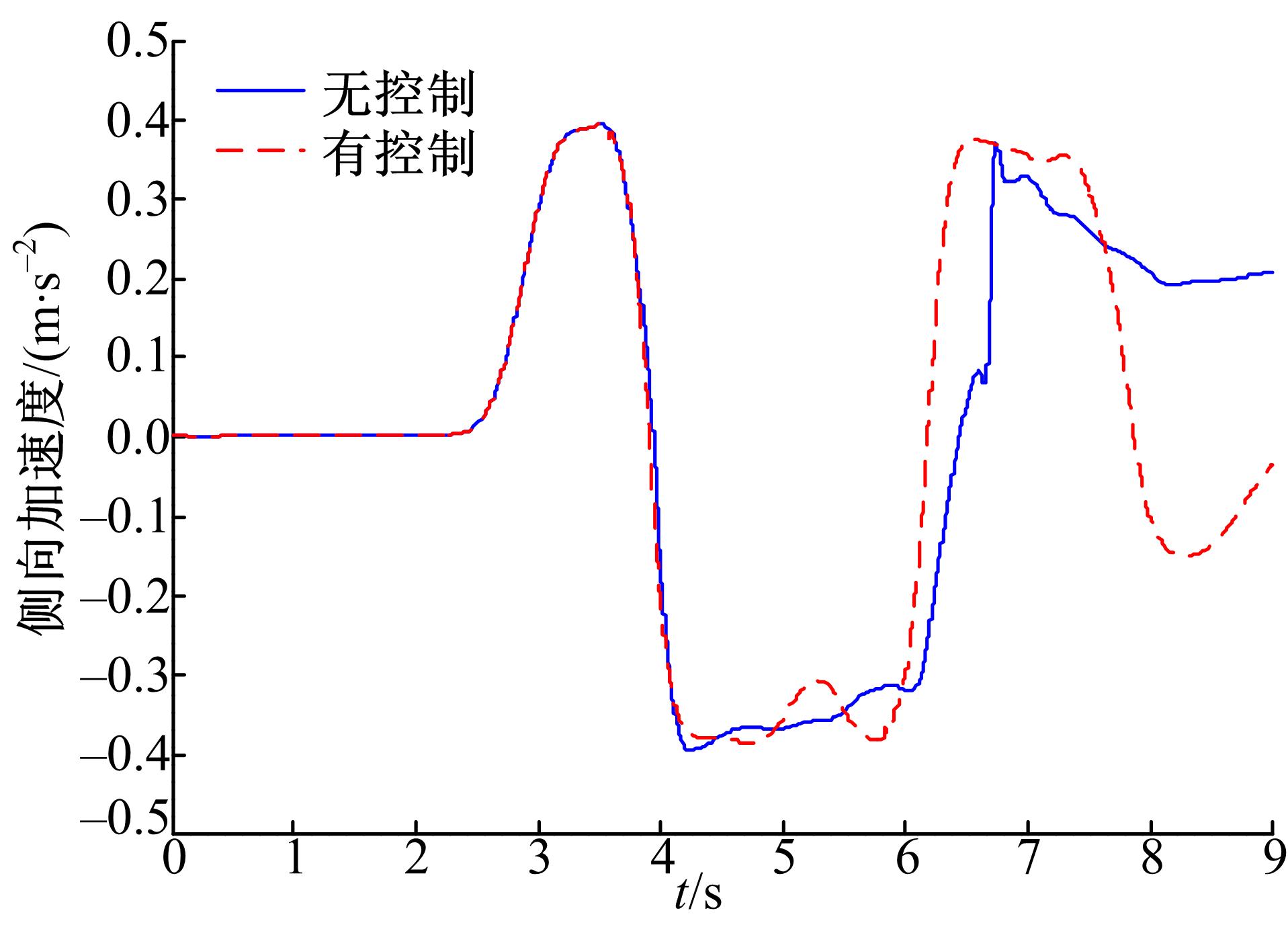
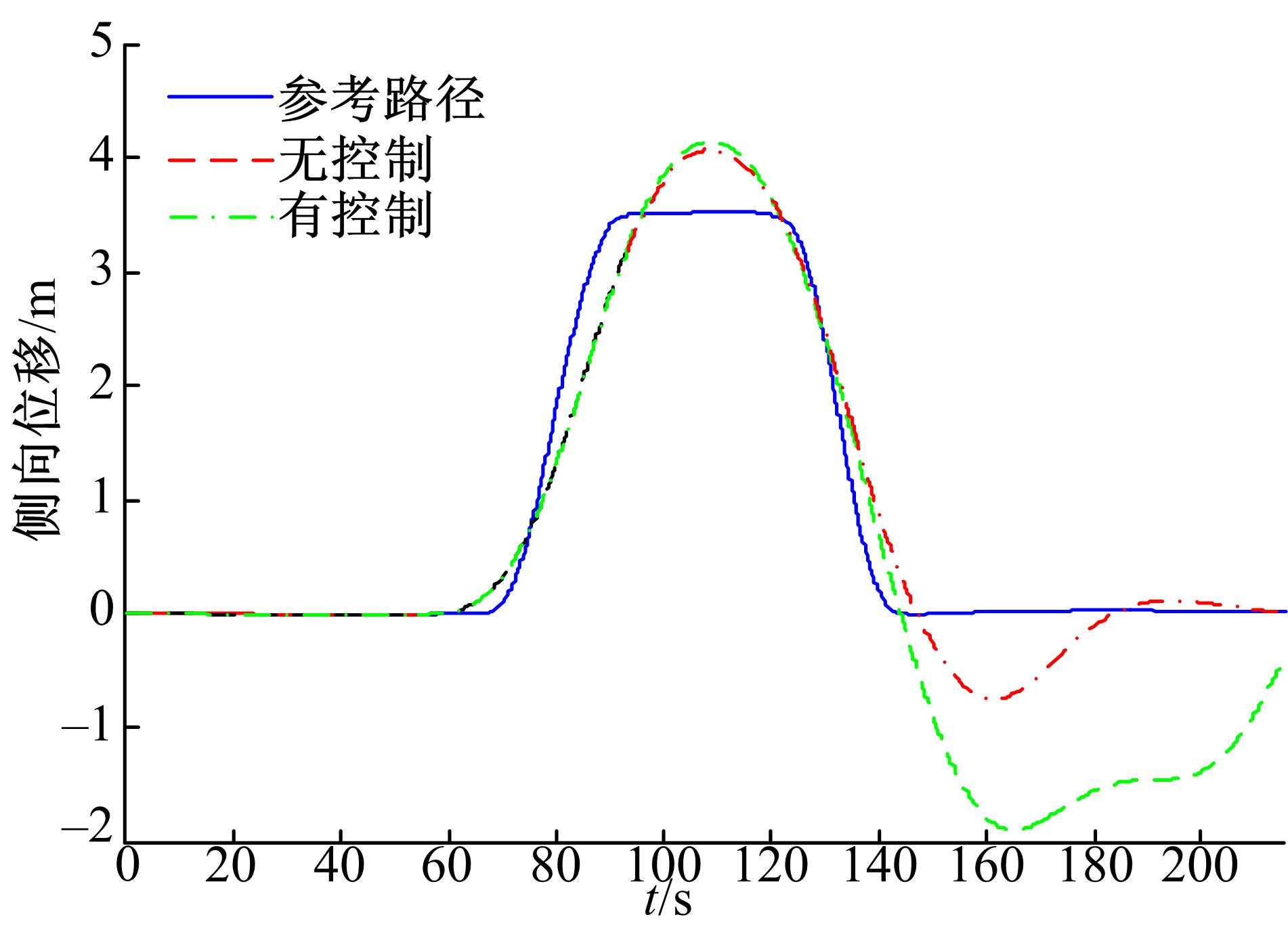
图11和图12分别为侧向加速度和车辆运动轨迹。由图可知, 在车辆无稳定性控制的情况下, 车辆失去了稳定性; 而当车辆有稳定性控制时, 车辆能够稳定行驶。
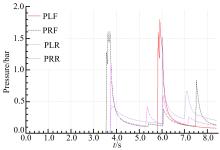
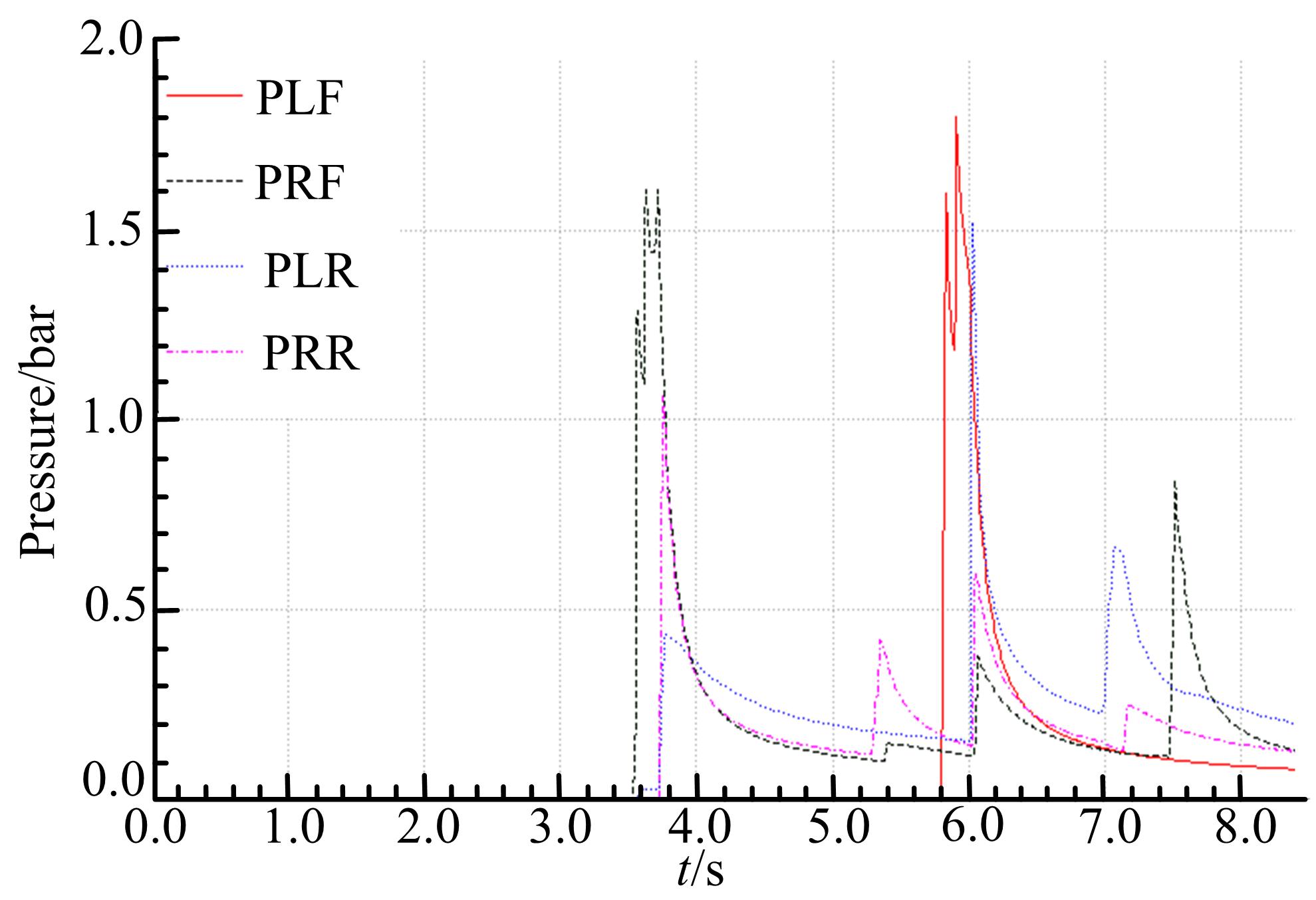
在车辆进行双移线试验的过程中, 当车辆出现严重的过度转向或不足转向时, 由于横摆稳定性控制的作用, 会对车辆的车轮施加一定的制动力, 进而改善车辆的稳定性。图13为在有稳定性控制的情况下获得的轮缸制动压力曲线。
本文提出了基于EHB系统的车辆稳定性控制策略。首先, 对轮缸压力跟随特性及控制方法进行了研究, 采用模糊PI自整定算法对EHB系统轮缸的目标压力进行优化控制。然后, 对车辆稳定性控制策略进行了研究, 在运用模糊推理对控制变量的门限值进行确定的基础上, 利用逻辑门限PI控制方法计算出附加横摆力矩, 并通过EHB系统实现附加横摆力矩。实验结果表明:模糊PI自整定算法在EHB的整个工作区段都具有良好的控制效果; 本文所提出的控制策略能够及时处理转向过程中出现的不足转向和过度转向, 大大改善了车辆转向行驶的安全性。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|