基于NURBS的挖掘机器人时间最优轨迹规划
 , 王飞, 张登雨
, 王飞, 张登雨 NURBS-based time-optimal trajectory planning on robotic excavators
GUAN Cheng, WANG Fei, ZHANG Deng-yu
, WANG Fei, ZHANG Deng-yu 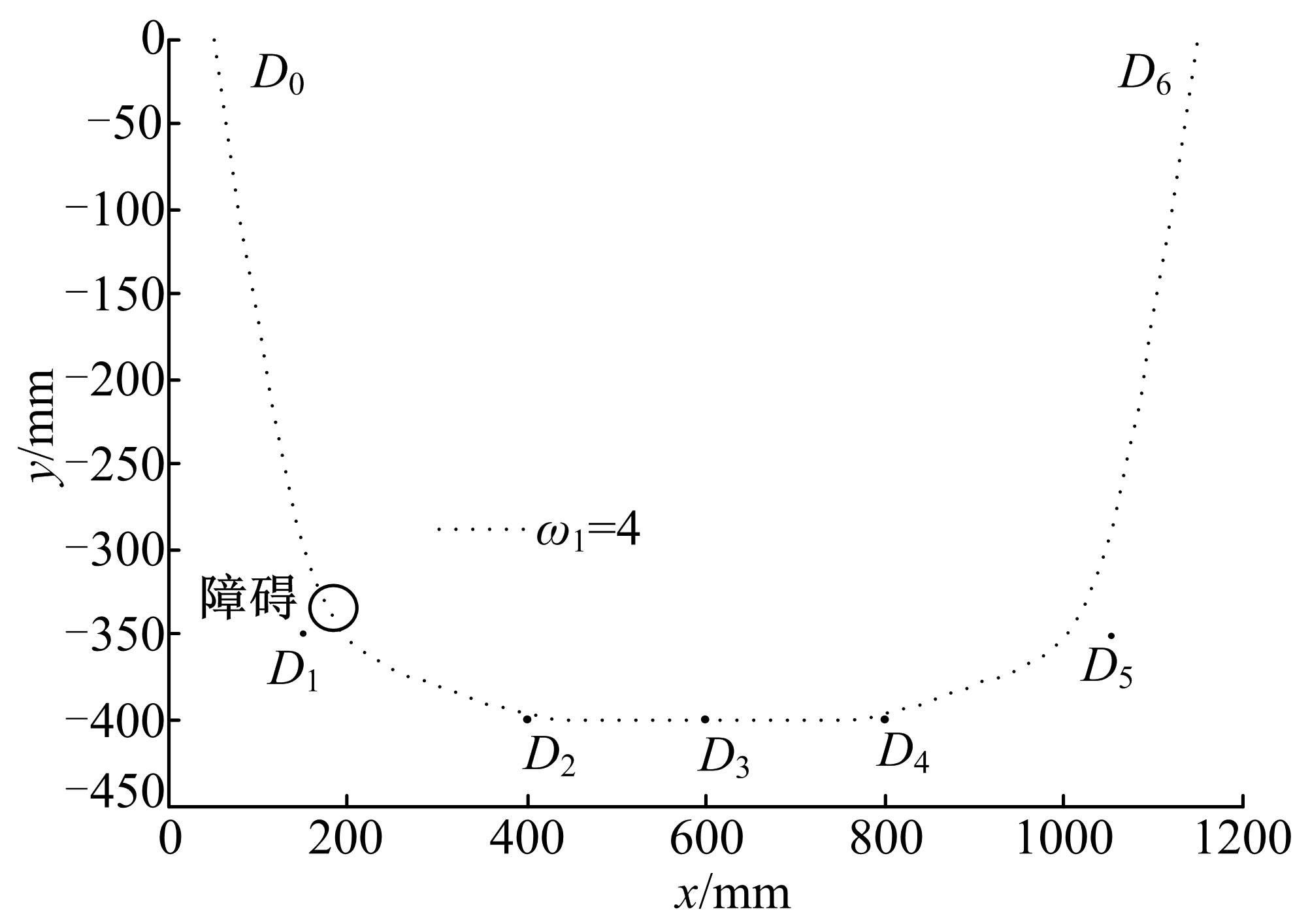
基于NURBS的挖掘机器人时间最优轨迹规划 |
|
管成, 王飞, 张登雨 |
NURBS-based time-optimal trajectory planning on robotic excavators |
|
GUAN Cheng
, WANG Fei, ZHANG Deng-yu |
| ωi =[1 4 3 1 3 4 1]时挖掘机器人铲斗末端轨迹曲线 |
| |