基于路面识别的汽车驱动力模糊滑模控制
 , 张进
, 张进 Fuzzy sliding mode traction control based on road friction coefficient estimation
ZHAO Jian1 , ZHANG Jin1 , ZHU Bing1, 2
, ZHANG Jin 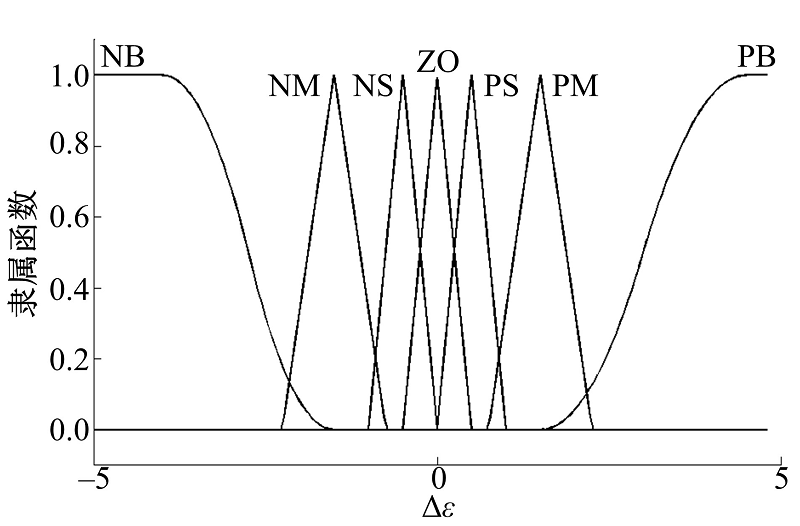
基于路面识别的汽车驱动力模糊滑模控制 |
|
赵健, 张进 |
Fuzzy sliding mode traction control based on road friction coefficient estimation |
|
ZHAO Jian
, ZHANG Jin |
| 输出Δ ε 的隶属函数 |
| |