{kind=link}
{kind=link}
{kind=link}
基于向量误差修正模型的短时交通参数预测
[邴其春1  , 杨兆升
, 杨兆升1, 2, 3 , 周熙阳1 , 马明辉1 ]
, 杨兆升, 周熙阳|
|


作者简介:邴其春(1989-),男,博士研究生.研究方向:智能交通系统理论与技术.E-mail:bingqc13@mails.jlu.edu.cn
为了进一步提高短时交通参数预测的精度,针对交通参数之间存在的内在相关性,在对各交通参数时间序列进行平稳性检验、协整检验的基础上,构建了一种适应于短时交通参数预测的多变量时间序列模型-向量误差修正模型,并对模型的稳定性进行了检验。最后,利用上海市南北高架快速路的感应线圈实测数据进行了实验验证和对比分析。实验结果表明,所构建的向量误差修正模型具有较好的预测效果,能够进一步降低短时交通参数预测的误差。
In order to further improve the prediction accuracy of short-term traffic parameters, according to the inherent correlation between traffic parameters, on the basis of stationarity test and cointegration test for traffic parameters time series, a multivariate time series model for short-term traffic parameters forecasting is proposed, which is called vector error correction model. The stationarity of the vector error correction model was tested. Validation and comparative analysis were carried out using inductive loop data measured from the north-south viaduct in Shanghai, China. The experiment results indicate that the proposed vector error correction model has good prediction performance and can further reduce the prediction errors of short-term traffic parameters.
准确、可靠的短时交通参数预测信息是智能交通系统(Intelligent transportation systems, ITS)的基础和关键, 其预测精度直接影响着自适应交通控制系统以及动态交通诱导系统等多项ITS核心功能的应用效果。随着智能交通系统的发展, 短时交通参数预测发挥着越来越重要的作用。传统的预测方法将交通参数数据作为一维时间序列进行预测, 如时间序列模型[1]、支持向量机模型[2]、最近邻模型[3]、神经网络模型[4, 5]等, 此类方法仅考虑了交通参数的时间相关性, 预测效果受到限制。随着研究的深入, 交通参数的时空相关性被应用于短时预测领域。如常刚等[6]提出了一种基于时空依赖性的区域路网短时交通流预测模型; 高为等[7]提出一种基于交通流时空变化特性和RBF神经网络的短时交通流预测方法; Mina等[8]通过构建多变量的时空自回归模型实现了流量和速度的短时多步预测; Stathopoulos等[9]以预测点的上游检测器数据为基础建立了多变量状态空间模型。上述短时交通参数预测方法大多是以单个交通流参数为基础, 考虑其时间或空间相关性建立预测模型, 忽视了交通参数(流量、速度、占有率)之间内在相关性的有效利用。
本文针对交通参数之间存在的内在相关性, 在深入分析各参数时间序列内在关系的基础上, 引入计量经济学中经典的向量误差修正模型, 构建适应于短时交通参数预测的向量误差修正模型, 并利用上海市南北高架快速路的实测数据进行实验验证。
向量误差修正(Vector error correction, VEC)模型是一种具有特定形式的计量经济学模型。其基本思想是:若变量间存在协整关系, 则表明这些变量间存在长期均衡关系, 而这种长期均衡关系是在短期波动过程的不断调整下得以实现的[10]。交通参数时间序列的一阶差分是平稳序列, 受到各参数之间长期均衡关系的影响, 各参数之间存在一种误差修正机制, 使它们的某些线性组合也是平稳序列, 以避免长期均衡关系出现较大偏差。任何一组相互之间存在协整关系的时间序列都存在误差修正机制, 通过变量之间短期的调节行为, 保持其长期均衡关系。因此, 本文通过深入分析交通参数之间的内在相关性, 试图寻找短时交通参数之间误差修正机制, 构建适应于短时交通参数的向量误差模型。
向量误差修正模型是一种将协整关系和误差修正模型结合起来的多变量时间序列模型, 它是在向量自回归模型的基础上建立起来的。
设yt=(y1t, y2t, …, ykt)为k维随机时间序列, 其中, t=1, 2, …, T, 且yt~I(1), 即每一个yit~I(1), i=1, 2, …, k, 如果yt不受d维外生时间序列xt=(x1t, x2t, …, xdt)影响, 可建立VAR模型为:
式中:yt为k维模型变量; yt-p为变量的p阶滞后量; p为滞后阶数; Ap为k× k阶系数矩阵; ut为随机扰动项。
对式(1)进行差分处理, 可得:
式中:Π =
若yt存在协整关系, 则Π yt-1~I
式中:β 'yt-1=ecmi-1为误差修正项, 反映变量之间的长期均衡关系。
式(3)可写成:
式(4)即为向量误差修正模型, 其中的每一个方程都是一个误差修正模型。
实验数据来源于上海市南北高架长约10 km快速路上感应线圈检测器采集到的交通流数据, 包括交通流量、地点速度和时间占有率数据。该路段设置有24个主线检测截面和30个匝道检测截面, 分别安装有88个主线检测器和60个匝道检测器。实验数据为2008年9月到10月间连续5个周一的24 h感应线圈数据, 数据采样间隔为20 s。由于20 s采样间隔的交通流数据波动性较大, 较少应用于短时交通参数预测, 本文将其合成为5 min数据进行预测分析。图1为上海市南北高架某路段结构示意图。
 | 图1 上海市南北高架某路段结构示意图Fig.1 Road segment of north-south viaduct bridge in Shanghai |
交通参数时间序列平稳性检验是模型构建的基础, 可以有效避免伪回归现象的出现。本文采用ADF单位根检验法对交通参数时间序列进行平稳性检验。检验结果如表1所示。检验结果表明, 流量、速度、时间占有率三个交通参数的原始时间序列是非平稳的, 而它们的一阶差分是平稳序列, 即交通参数时间序列均为一阶单整, 符合构建VEC模型的前提条件。
| 表1 ADF单位根检验结果 Table 1 Test results of ADF unit root |
在选取滞后阶数时, 既要满足足够数目的滞后项, 使其能完整反映模型的动态特征, 又要使模型有足够的自由度, 因为随着滞后阶数的增大, 模型的自由度减小[11]。因此, 本文综合考虑LR、FPE、AIC、SC、HQ五个检验统计量, 通过确定无约束VAR模型的最佳滞后阶数, 进而选取VEC模型的最佳滞后阶数。检验结果如表2所示。
| 表2 最佳滞后阶数确定 Table 2 Optimal lag order determination |
由表2的检验结果可见, 根据LR、FPE、AIC、SC、HQ五个检验统计量确定的无约束VAR模型最佳滞后阶数为3, 而VEC模型的最佳滞后阶数为一阶差分后的滞后阶数, 即为无约束VAR模型的最佳滞后阶数减1, 因此VEC模型的最佳滞后阶数取为2。
向量误差修正模型是具有约束的向量自回归模型, 在建模之前需对交通参数进行协整检验, 只有交通参数之间存在协整关系才能构建向量误差修正模型。由稳定性检验结果可知, 交通参数时间序列均为一阶单整, 因此, 可直接对交通参数数据进行协整检验。本文采用Johansen检验方法进行协整检验, 该方法不仅能够检验出交通参数之间是否存在协整关系, 而且可以准确获得协整向量的个数。上文中确定的无约束VAR模型的最佳滞后阶数为3, 因此, 协整检验的滞后阶数取为2。协整检验结果如表3所示。
| 表3 Johansen协整检验结果 Table 3 Results of Johansen cointegration test |
由表3检验结果可知, 在5%的显著性水平下, 交通流量、地点速度、时间占有率三参数之间存在一个协整关系, 说明交通参数之间存在长期均衡关系, 可以构建VEC模型。将交通参数之间的协整关系标准化得到协整方程为:
O=0.619922S-0.009985V+0.002866 (5)
式中:O表示时间占有率; S表示地点速度; V表示交通流量。
由协整检验结果可知, 交通流量、地点速度、时间占有率三参数之间彼此存在协整关系, 在此基础上构建向量误差修正模型, 以考察交通流三参数之间的长期均衡关系。利用EViews7.0软件对VEC模型的参数进行估计, 结果如式(6)~(8)所示。
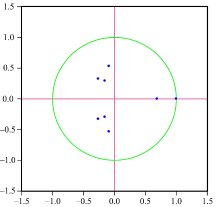
在利用所构建的VEC模型进行短时交通参数预测之前需对模型进行稳定性检验, 如果被估计的VEC模型所有根模的倒数小于1, 即都位于单位圆内, 则该VEC模型是稳定的。VEC模型共有kp个特征根, 其中k为内生变量的个数, p为无约束VAR模型的最佳滞后阶数。如果VEC模型有r个协整关系, 则会有k-r个根等于1。模型稳定性检验结果如图2所示。
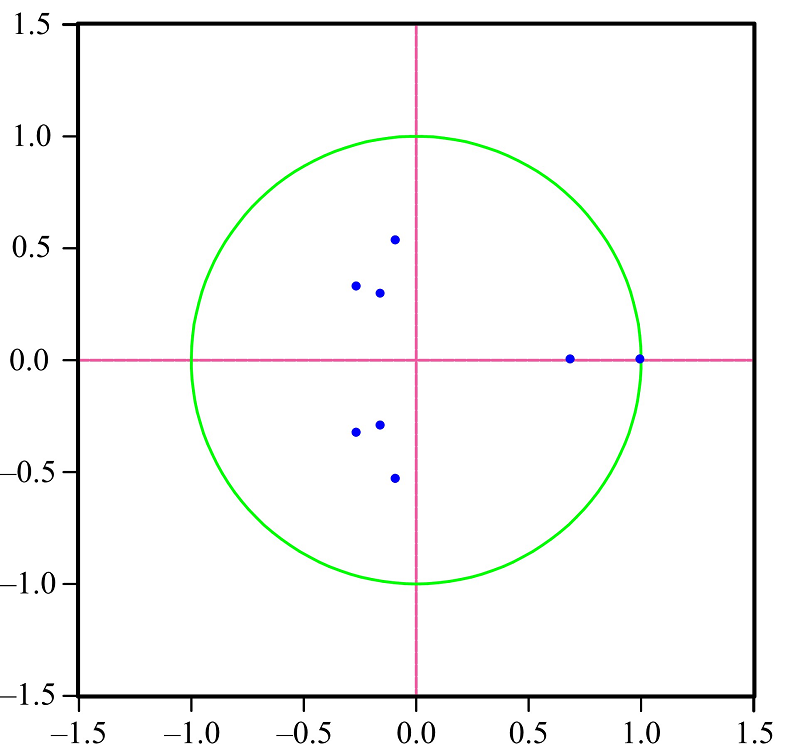 | 图2 模型稳定性检验结果Fig.2 Stationarity test results of model |
由图2检验结果可见, 所构建的VEC模型有2个根模的倒数在单位圆上(两个点重合), 其余7个均位于单位圆内。因此, 所构建的VEC模型是稳定的, 基于该模型的短时交通参数预测结果是可靠的。
为了评价向量误差修正模型对于短时交通参数的预测效果, 本文引入平均绝对百分比误差(Mean absolute percentage error, MAPE)和均等系数(Equal coefficient, EC)两个评价指标。
平均绝对百分比误差(MAPE):
均等系数(EC):
式中:
均等系数表示预测值与实际值之间演化趋势的相似度, 均等系数越大, 说明预测值与实际值之间拟合度越好。
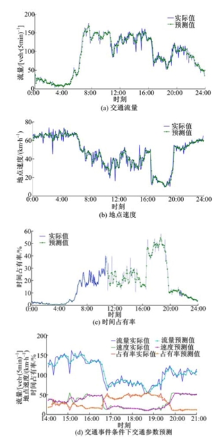
为了验证向量误差修正模型对短时交通参数预测的效果, 本文以东侧主线NBDX16(2)感应线圈检测器采集到的数据为基础, 选取2008年9月1日、9月8日、9月15日和9月22日四天的数据构建向量误差修正模型, 利用9月29日的数据对模型的预测性能进行评估。交通流三参数的预测效果如图3所示。由图3可见, 本文所构建的向量误差修正模型对于交通流量、地点速度和时间占有率三参数均具有较好的预测效果, 预测值与实际值之间拟合效果较好, 预测误差较小。由图3(d)可见, 当发生交通事件时, 交通流量和地点速度急剧下降, 时间占有率急剧升高, 向量误差修正模型能够充分利用交通参数之间的内在相关性, 及时捕获交通参数数据的变化趋势, 在突发交通事件条件下, 向量误差修正模型也具有较高的预测精度。
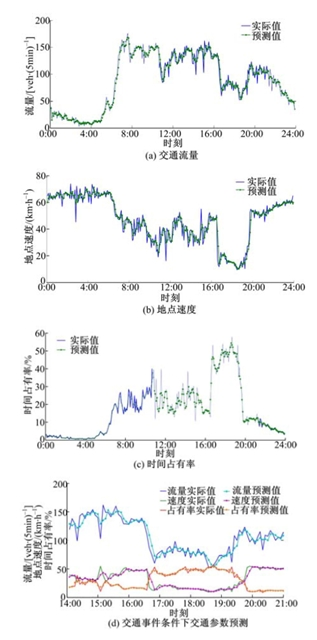 | 图3 交通参数预测效果图Fig.3 Traffic parameters prediction effect |
为对比分析向量误差修正模型在短时交通参数预测方面的优越性, 本文分别选取自回归移动平均模型(Autoregressive integrated moving average model, ARIMA)和文献[6]提出的多变量时间序列状态空间模型作为对比方法, 对实验线路的感应线圈数据进行预测分析。实验结果如表4所示。
| 表4 预测结果对比分析 Table 4 Analysis of prediction results |
由表4可以看出:①不同预测模型对于交通参数的预测效果差别较大, 本文构建的VEC模型充分利用交通参数之间的内在相关性以及长期均衡性, 在MAPE和EC方面均表现最好, 文献[6]方法综合考虑了交通参数的时空相关性, 其预测效果次之, 而ARIMA模型仅考虑了交通参数之间的时间相关性, 预测效果受到限制, 在3种预测方法中预测精度最低; ②同一预测模型对于不同交通参数的预测效果相近, VEC模型对于不同交通参数的预测效果均表现较好, 其MAPE均维持在6%上下, EC在0.96上下, 能够满足短时交通参数预测的需求。综上所述, 本文构建的向量误差修正模型能够较好地适应短时交通参数预测的要求, 进一步降低了短时交通参数预测的误差。
针对交通参数之间存在的内在相关性, 在对各参数时间序列进行平稳性检验、协整检验的基础上, 构建了一种适应于短时交通参数预测的向量误差修正模型, 并以上海市南北高架快速路上感应线圈的实测数据进行了实验验证和对比分析。实验结果表明, 所构建向量误差修正模型的预测效果明显优于对比方法的预测效果, 能够进一步降低短时交通参数预测的误差。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|