


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于质心参照拓扑的灰色航迹抗差关联算法
[董凯 , 刘瑜, 王海鹏]
, 刘瑜, 王海鹏]
, 刘瑜, 王海鹏]
|
|


作者简介:董凯(1986-),男,博士研究生.研究方向:多源信息融合.E-mail:188dongkai@163.com
针对传感器系统误差影响下利用目标拓扑信息的航迹关联算法性能受参照目标状态估计精度制约的问题,提出了一种基于质心参照拓扑的灰色航迹抗差关联算法。该算法以传感器共同观测目标的融合质心位置和航向为参照,建立目标拓扑描述向量,然后采用序贯修正的灰色关联分析方法计算各传感器航迹间的灰关联度,最后以灰关联度为检验统计量进行全局最优的航迹抗差关联判决。仿真结果表明,在随机交叉目标和密集平行编队环境下,该算法的性能和稳健性明显优于传统方法。
The performance of tracking association algorithm using target topology information is influenced by the estimation accuracy of the reference target state because of sensor bias. To solve such problem, a grey track anti-bias association algorithm based on centroid topology of reference is proposed. First, the algorithm takes the position and course of the sensor commonly observed targets' fusion centroid as the reference, and constructs the target topological vector. Then, the subsequential modified grey association analysis algorithm is used to calculate the grey association degree of the sensors. Finally, the global optimal track anti-bias association is carried out using the grey association degree as test statistical vector. Simulation results show that the performance and robustness of the proposed algorithm are better than the traditional algorithm apparently in random cross targets and dense parallel formation environment.
分布式多传感器航迹融合的前提是航迹关联, 其含义是判断不同传感器的两条航迹是否代表同一个目标的过程[1]。在传统的分布式航迹关联算法研究中, 通常假定传感器不存在系统误差。在实际工程应用中, 传感器不可避免存在距离、方位角、俯仰角测量的系统误差, 系统误差使传感器的观测航迹整体偏离目标真实轨迹, 因此依靠各传感器航迹间相对位置信息进行航迹关联判断的算法[2, 3]适用性大大降低。
针对传感器存在系统误差条件下的航迹关联问题(本文称之为航迹抗差关联问题), 文献[4]首先提出利用观测目标参照拓扑信息, 采用扇形格和弥散化系数量化拓扑结构, 然后采用模糊模式识别方法进行航迹关联; 文献[5]选择三角形作为拓扑结构元, 用边长构造归一化拓扑相似度, 没有利用目标的相对角度信息, 降低了目标密集环境下的可靠性; 文献[6]考虑目标丢失的情况, 采用松弛迭代的方法实现区域目标的最大匹配, 但要求目标分布区域较小和方位系统误差较小, 并且只利用了目标之间的距离信息; 文献[7]分局部特征和全局特征对编队目标结构进行描述, 局部特征描述以三角形为结构元, 全局特征描述以编队重心为参照计算目标结构特征量, 并针对两种方法的优缺点提出层次化匹配关联算法, 但在平行等间距编队目标情形下存在关联模糊; 文献[8]应用灰色理论构建传感器航迹的局部自相关矩阵, 然后进行航迹关联判决的方法, 但没有给定拓扑目标的排列顺序, 关联结果存在不确定性; 文献[9]考虑传感器的方位系统误差, 以目标航向为基准划分多象限, 建立各象限内目标位置径向距离和拓扑向量、航速欧式距离和航向变化率3个模糊因素集, 进行模糊航迹对准关联, 但目标估计航向值的随机扰动(例如目标机动时滤波精度降低)将使算法性能大大降低。针对参照目标精度影响航迹抗差关联的问题, 本文提出一种基于质心参照拓扑的灰色航迹抗差关联算法, 与传统拓扑方法的主要区别在于:①利用航迹数据中的状态估计协方差信息, 计算观测区域目标的融合质心; ②以融合质心位置及航向建立参照系进行目标拓扑描述, 比目标参照系[9]的精度和稳定性更高; ③利用航迹历史信息和灰色关联分析方法[10], 对各传感器航迹拓扑描述向量进行关联匹配。最后根据航迹灰关联度矩阵进行全局最优的航迹抗差关联判决。
通常认为传感器系统误差为较小常量或者长时间范围内的缓变量, 因此在较短观测时间内可视为常量。设真实目标的距离和方位分别为r和θ , 不考虑随机量测误差时, 传感器方位和距离系统误差分别使目标观测值偏离Δ θ 角度和Δ r距离, 即在系统误差影响下, 所有目标的观测值在传感器极坐标系下相对目标真实位置发生Δ θ 的旋转和Δ r的伸缩。文献[9]的推导表明, 当目标观测区域距离传感器较远时(Δ r/r≪1), 可忽略系统误差引起的仿射变换, 近似认为传感器的系统误差不改变各目标之间的相对位置关系, 即一部传感器的航迹经过整体旋转和平移后能够与另一部传感器的航迹重合。从而为利用目标拓扑信息实现航迹关联提供了可能。
假设m部传感器对共同观测区域内的目标探测概率为1, 选取各传感器共同观测的n个目标, 分别计算观测目标的融合质心状态估计。设
式中:
从而可以得到加权融合的区域目标质心坐标(
需注意, (
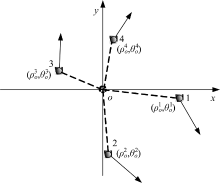
图1给出了k时刻传感器观测n个(n=4)目标在传感器局部坐标系下的整体态势, 图中
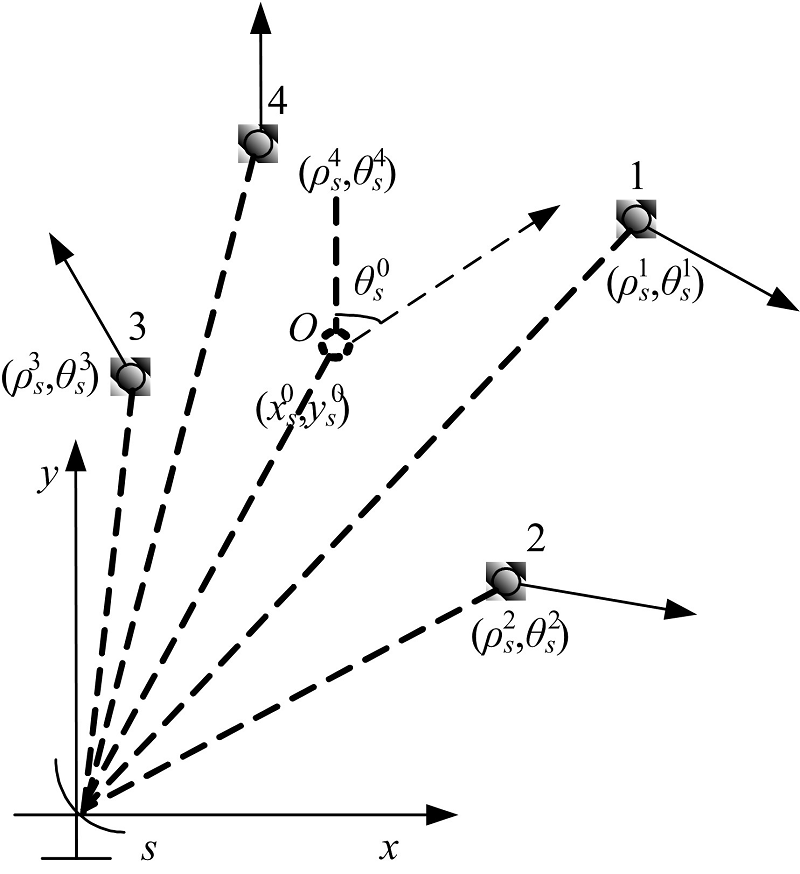 | 图1 传感器局部坐标系下目标分布Fig.1 Target distribution in sensor’ s local coordinate |
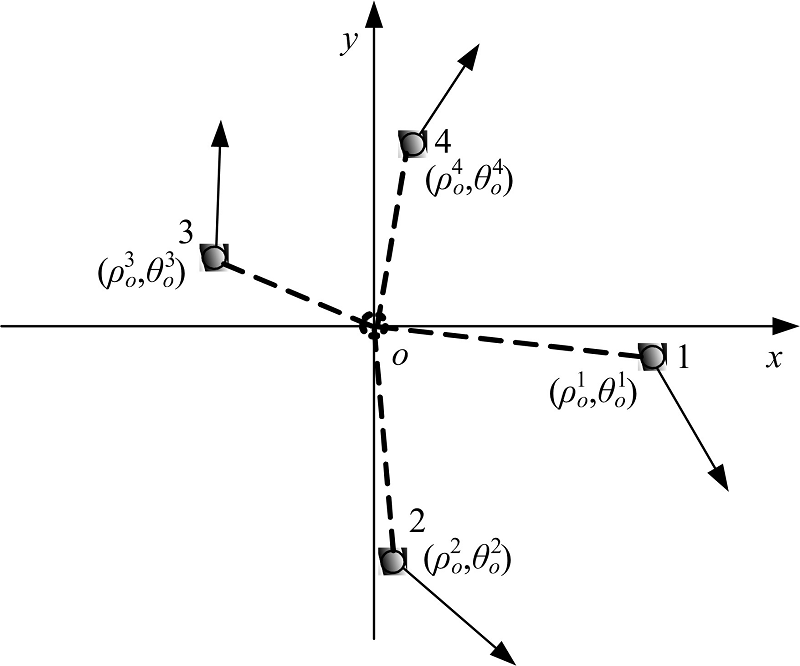 | 图2 质心参照系下目标拓扑结构Fig.2 Targets’ topology in centroid reference coordinate |
与以往的目标参照拓扑法中以各个目标为参照相比, 加权融合质心比单一目标具有更高的位置和航向精度, 因而能够为不同传感器的目标提供更为准确的参照拓扑描述, 为算法性能的提高做了重要铺垫。
建立区域目标质心参照系之后, 就可以对目标的状态进行拓扑描述。虽然在系统误差影响下各传感器的区域目标质心参照系并不重合, 但目标在不同质心参照系下径向距离和方位是近似不变的(存在随机误差)。此外, 目标速度大小与参照系的选择无关, 运动方向在质心参照系下同样是近似不变的, 因此本文选择上述4个不变信息量构建各传感器目标的拓扑描述向量。区域目标i在质心o参照系下的拓扑描述向量
式中:
为简化算法描述, 以两部传感器(s=1, 2)为例进行讨论, 同理可得传感器2的区域目标j在质心o'参照系下的拓扑描述向量
传感器1和传感器2的拓扑数据列分别表示为To(k)=
式中:l=1, 2, 3, 4为描述向量中的指标序号; ρ 为分辨系数, ρ 越小, 分辨力越大, 一般取ρ =0.5;
从式(14)可以看出, 指标绝对差的计算是在单个时刻数据列之间进行的, 没有利用航迹的历史信息, 因此本文借鉴文献[11]中序贯航迹关联思想, 把航迹当前时刻与其历史时刻联系起来, 对指标绝对差进行序贯累积, 得到修正的指标绝对差Δ 'ij(k, l)如下:
Δ 'ij(k, l)=Δ 'ij(k-1, l)+Δ ij(k, l) (15)
需要注意的是, 虽然
然后对数据列各个指标的关联系数求加权平均, 得到k时刻拓扑描述向量
式中:a(l)为指标l的权系数, 且
γ (k)=
根据两部传感器航迹的灰关联度矩阵建立以γ ij(k)为统计量, L(k)为目标函数的二维分配模型[12, 13], 求解全局最优的航迹关联关系:
式中:η ij为二进制变量, η ij=1表示航迹i和航迹j来自于同一目标; η ij=0则表示来自于不同目标。二维分配处理得到的关联对再经过灰关联度门限ε (0.5≤ ε < 1)的检验, 即灰关联度高于门限的关联对才被确认为航迹关联对。ε 的取值可通过仿真确定。
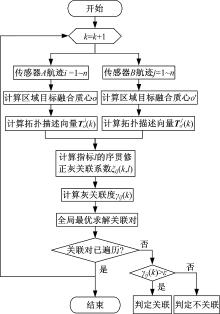
将该问题推广为多局部节点的航迹关联问题时, 可参考文献[14]中的全局统计量, 建立多维分配模型, 采用拉格朗日松弛算法求解, 这里不再赘述。图3给出了算法流程图。
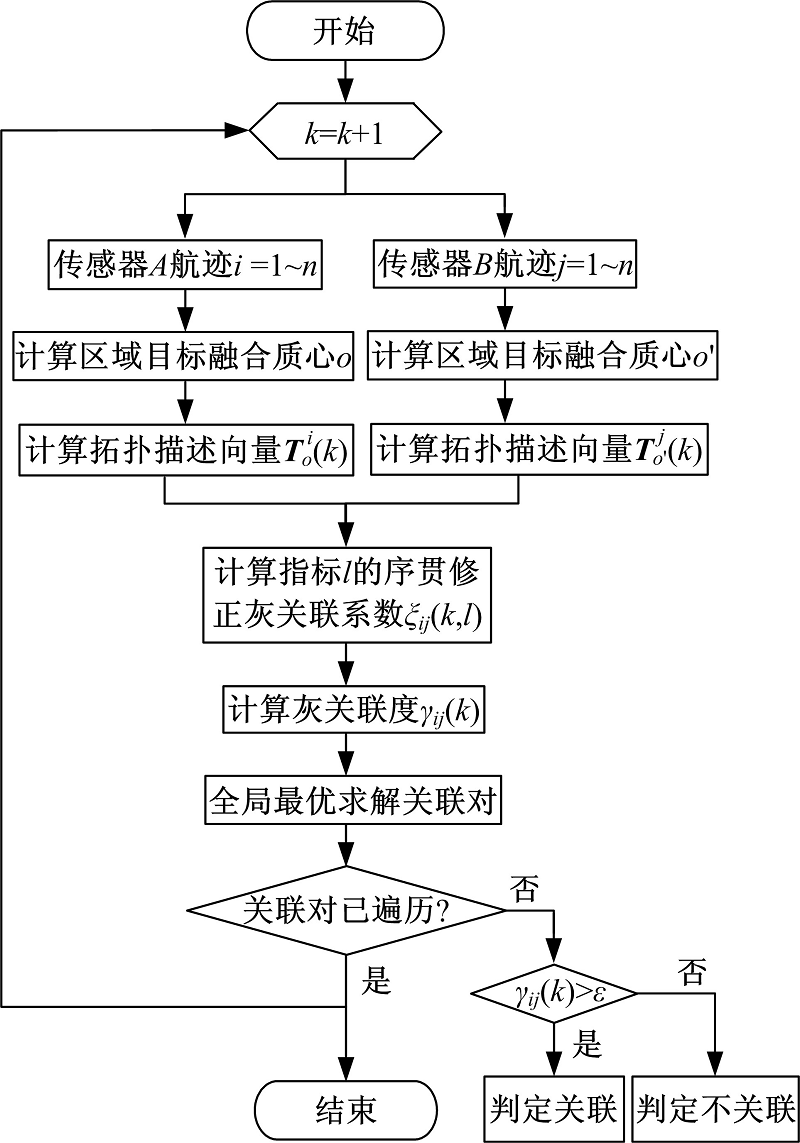 | 图3 算法流程图Fig.3 Flow chart of algorithm |
为验证算法的性能, 对本文提出的质心参照法和文献[9]中的拓扑模糊法进行50次步长为12的蒙特卡洛仿真, 给出算法的航迹抗差正确关联率和错误关联率结果。设两部传感器坐标分别为(100, 100) km和(200, 100) km, 测距误差均为100 m, 测角误差均为0.3° , 测距系统误差均为100 m, 测角系统误差均为3° , 采样周期为4 s, 灰关联度门限ε =0.6, 分辨系数ρ =0.5, 指标权系数a=[0.4, 0.4, 0.1, 0.1], 设置2种仿真环境。
环境1:随机交叉目标是航迹关联算法研究中的一种典型环境[1], 设目标数30, 目标初始位置在(0, 300)km与(0, 200)km之间按正态分布产生, 初速和初始航向分别在4~220 m/s和0~2π 区间均匀分布。
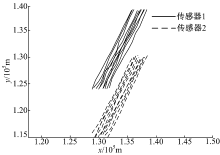
环境2:平行编队目标是航迹关联算法研究中的另一种典型环境[15], 设目标数10, 第一个目标初始位置为(130, 120) km, 相邻目标间隔300 m, 初始速度为400 m/s, 初始航向为30° (以正北为基准)。
图4为环境1下两部传感器的观测航迹, 图5为环境2下两部传感器的观测航迹。可见在系统误差影响下, 两部传感器的航迹均出现了较大偏差。
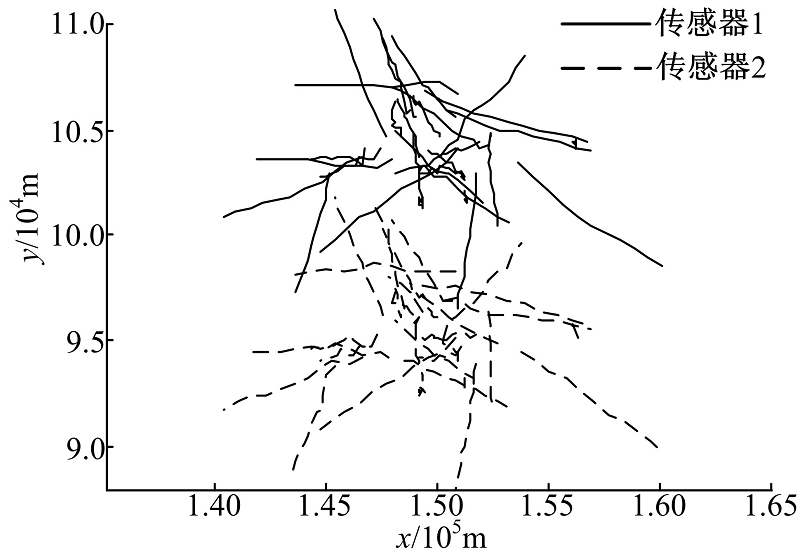 | 图4 两部传感器的观测航迹(环境1)Fig.4 Tracks of 2 sensors(case 1) |
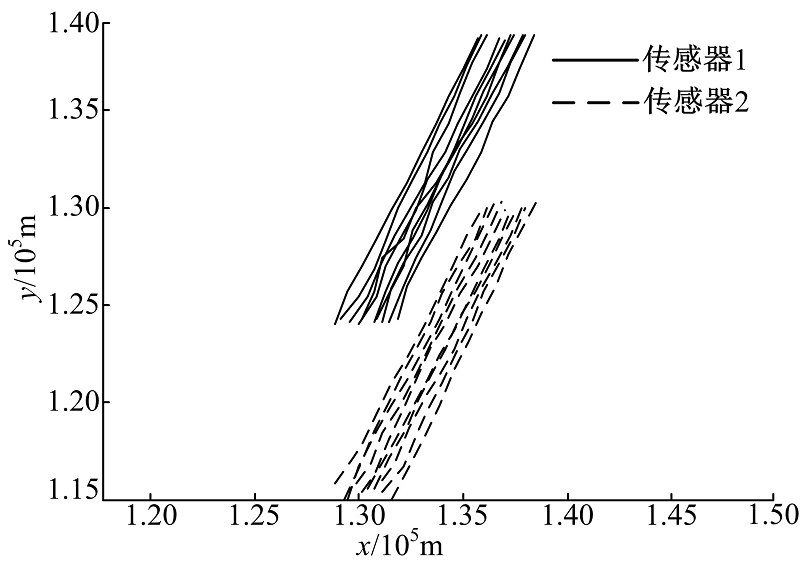 | 图5 两部传感器的观测航迹(环境2)Fig.5 Tracks of 2 sensors(case 2) |
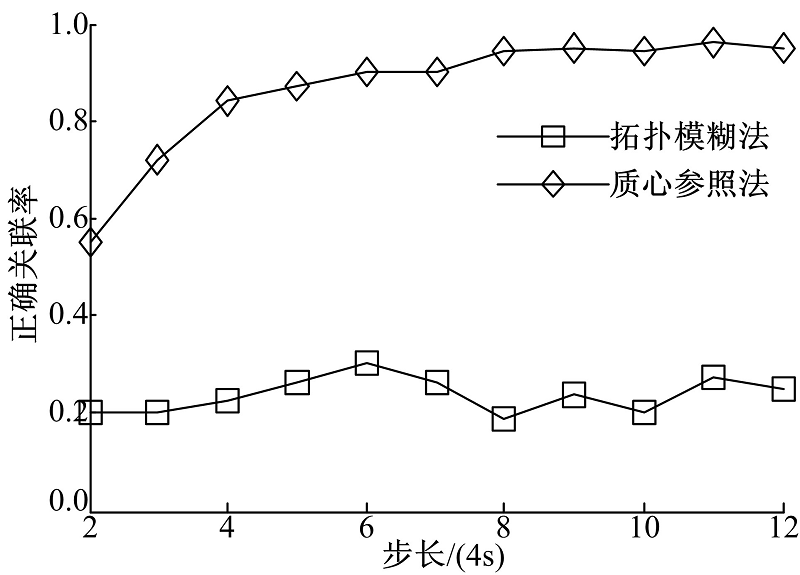
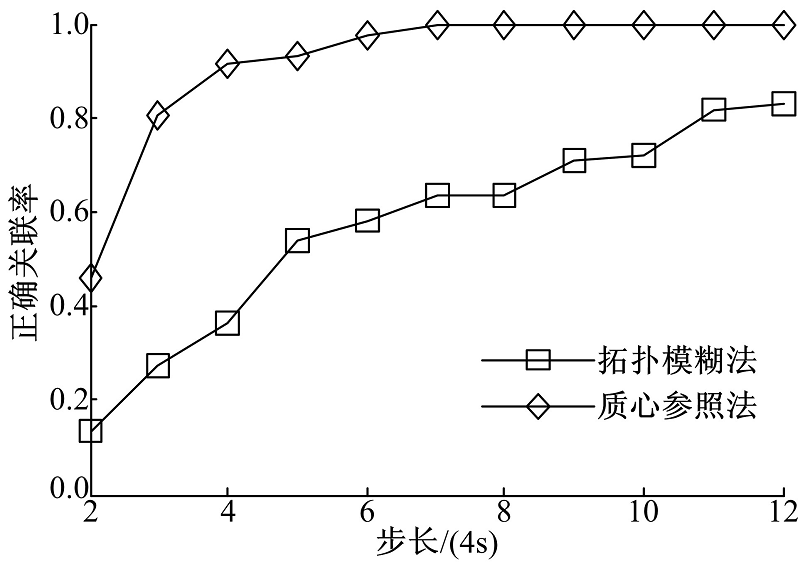 | 图6 航迹正确关联率(环境1)Fig.6 Correct track association ratio(case 1) |
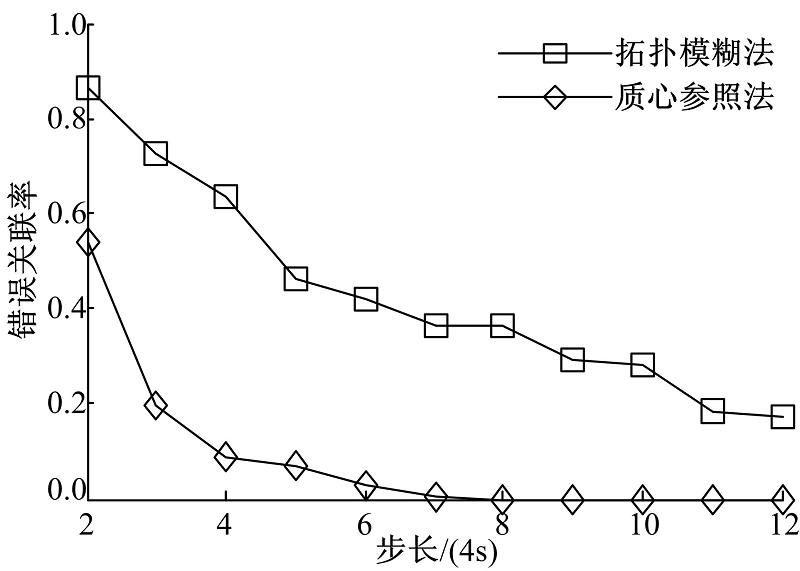 | 图7 航迹错误关联率(环境1)Fig.7 False track association ratio(case 1) |
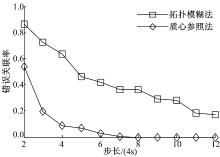
图6、图7分别为环境1下算法的航迹正确关联率和错误关联率比较图, 可见质心参照法的性能明显优于拓扑模糊法, 并且随步长推进, 目标密集程度逐步降低, 正确关联率逐步提高。主要原因是拓扑模糊法对每个目标建立参照拓扑信息, 而不同传感器对同一目标的航向估计值受滤波随机误差影响而存在差异, 导致不同传感器对同一目标建立的参照系之间存在随机旋转角, 降低了目标参照拓扑信息的匹配程度, 从而影响了算法性能。即只有当目标滤波稳定, 航向估计精度很高时才能保持较高的正确关联率, 如果由目标机动等原因导致滤波误差增大, 模糊拓扑法的性能将难以保证。相比之下, 质心参照法在加权融合算法的基础上建立质心参照系, 质心的坐标值和质心航向估计值均具有更高的精度和稳定度, 不同传感器在此参照系上构建的参照拓扑描述向量具备更高的匹配度, 从而使算法能够稳定保持更高的正确关联率。此外, 所采用的序贯修正灰关联度进一步提升了算法性能。
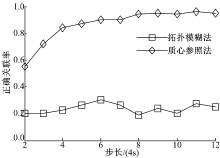
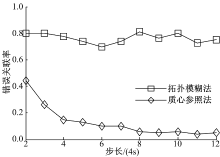
图8、图9分别为环境2下算法的航迹正确关联率和错误关联率比较图, 可见拓扑模糊法的性能较差, 并且在仿真时间段内没有显著变化, 主要原因有:①编队目标的速度和航向等运动特性相似, 导致拓扑模糊法中的速度和航向两个模糊因素失去辅助关联判决的作用; ②编队目标集中于根据算法要求划分的参照目标部分象限分界线附近, 在随机误差影响下其相对拓扑向量的准确性大大降低, 导致正确关联率较低; ③编队目标平行运动期间, 目标密集程度、拓扑结构变化不大。而质心参照法由于利用了航迹历史信息计算航迹间序贯修正灰关联度, 随步长推进能够持续提高正确关联率。
 | 图8 航迹正确关联率(环境2)Fig.8 Correct track association ratio(case 2) |
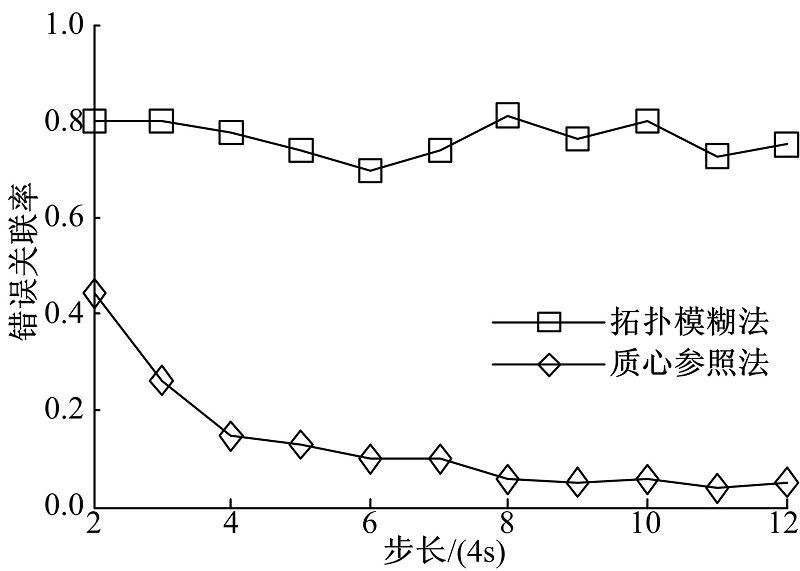 | 图9 航迹错误关联率(环境2)Fig.9 False track association ratio(case 2) |
本文对系统误差影响下的分布式多传感器航迹关联问题展开了研究, 提出一种基于质心参照拓扑的灰色航迹抗差关联算法。首先建立加权融合质心参照系以获得更为准确、稳定的目标拓扑描述, 然后利用参照系下4种与系统误差无关的匹配信息构建目标拓扑描述向量, 再计算各传感器航迹之间的序贯修正灰关联度矩阵, 最后进行全局最优的航迹关联判决。两种典型仿真环境下的仿真结果表明, 在传感器存在系统误差的条件下, 本文算法在关联正确率和环境适应性上表现出良好的抗差关联效果, 能够为误差配准提供可靠的航迹关联对。由于算法需要各传感器完全探测共同观测区域内的目标, 以保证目标拓扑结构的完整性, 因此对干扰环境下传感器存在虚假航迹和错误航迹的复杂情形适应性有所不足, 这也是需要进一步研究的内容。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|