

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于模糊聚类的驾驶决策判别
[王喆1  , 杨柏婷
, 杨柏婷2 , 刘昕1 , 刘群1 , 宋现敏3 ]
, 杨柏婷, 刘群|
|


作者简介:王喆(1979-),男,工程师.研究方向:网络计算,数据处理技术.E-mail:wangzhe@jlu.edu.cn
分析了在驾驶决策过程中的生理和心理活动,确定了影响驾驶决策的主要因素,例如感知范围、驾驶经验等。在此基础上,考虑驾驶心理,计算了驾驶员感知临界值和紧急响应临界值,并且利用模糊聚类方法对信息样本分类,得到信息样本在不同驾驶决策上的隶属程度,从而判别驾驶员采取加速、减速、匀速自由驾驶或紧急制动。最后,分析了不同道路等级条件下驾驶员心理感知响应的临界值变化。结果表明:驾驶员心理感知范围并不只是驾驶员视觉上对距离的感应,在不同速度条件下驾驶员心理也会发生很大变化。本文方法直观、简单,可为交通仿真和交通安全提供理论依据。
According to the traffic characteristics, the psychological and physiological activities of the driver in decision making process are analyzed. The main factors affecting driving decisions, such as the driver's range of perception and experience etc, were identified. Then, the psychological activities of the driver were considered and the driver perception threshold and emergency response threshold were determined. The method of fuzzy clustering analysis was used to classify a sample and the degree of membership of the sample in different driving decision-making was gotten. It was judged that the driver should accelerate, decelerate, uniformly drive or emergency brake. Finally, the driver perception threshold and emergency response threshold were analyzed on different grade roads. The results show that the driver's range of perception was not just the visual distance, and the driver's psychology would change a lot under different driving speeds. The proposed method is easy and simple to use. It can provide a theoretical basis for traffic simulation and traffic safety.
目前, 国内外学者在驾驶决策方面已进行大量研究。Wilde和Naatanen等[1, 2, 3]认为驾驶员在驾驶车辆时会尽量避免或降低驾驶风险, 驾驶决策与驾驶员所面对的驾驶风险存在直接联系, 在驾驶风险和驾驶安全两个角度分析了决策判别的依据。Tomas[4]利用Agent模拟, 结合驾驶员所面对的交通状况, 为驾驶员可选择的路线做出评价。许俊、邹智军和王晓原等[5, 6, 7, 8, 9]通过分析驾驶员在驾驶决策过程中决策的不断变化, 分别运用数理统计、决策树等方法建立决策模型。这些研究多倾向于风险决策和跟驰模型中的加减速分析, 虽然能够在一定程度上反映驾驶行为的变化, 但对于周边交通环境的微观变化和驾驶员的实时心理变化研究较少。周边交通环境的微观变化会引起驾驶员的心理变化, 进而对驾驶行为产生影响。本文选择模糊聚类分析方法对驾驶决策进行判别。模糊聚类分析方法能够根据驾驶员所采取的各种决策之间的模糊性, 简单、直观地对交通信息进行分类[10]。基于等价关系的聚类方法是将数据样本经过标准化, 建立模糊相似矩阵和模糊传递闭包, 选取适当的置信水平值进行聚类分析, 从而得到分类矩阵和特征信息矩阵。
本文基于模糊聚类分析方法, 利用驾驶员经验知识对交通信息进行分类, 分析不同类别的信息所产生的心理变化, 得到驾驶员加速、减速、匀速、自由驾驶以及制动等决策的判别方法。
虽然驾驶员的驾驶决策是驾驶员主观采取的行为, 但很大程度上是由周围交通环境中的客观因素决定的。为了更好地分析驾驶员的驾驶行为, 需要事先了解驾驶员的整个反应操作过程。
在车辆行驶过程中, 驾驶员受视野前方车辆的速度、位置等因素的刺激, 会做出一系列的驾驶决策响应, 例如加速、减速以及匀速等。在此刺激-响应反应中, 驾驶员在有限感知范围内获取交通信息, 根据经验模板对信息分类以确定决策指令, 最后按照指令驾驶车辆。
根据驾驶员的生理心理活动可将驾驶员的驾驶决策框架分为4个部分, 如图1所示。
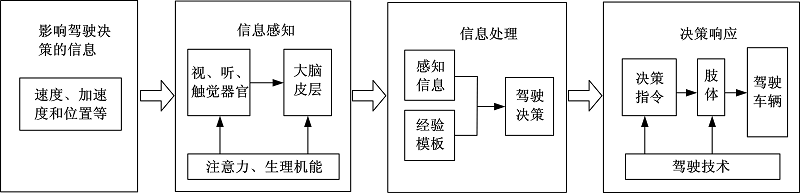 | 图1 驾驶员决策框架Fig.1 Framework of driver’ s driving decisions |
(1)影响驾驶员决策的交通信息
根据驾驶员的视觉特性, 影响驾驶员决策的交通信息主要包括前方车辆的行驶速度、加速度、位置和驾驶员所驾驶车辆的运行速度、出行目的和出行时间要求等。这些客观交通因素对驾驶员的驾驶行为具有决定性的作用。
(2)驾驶员对信息的感知
该部分是指驾驶员通过人体感觉器官收集影响驾驶员决策的交通信息, 经过大脑皮层处理, 进而达到认知的过程。
在对信息认知的过程中最重要的就是确定驾驶员对信息的感知范围, 如果信息在驾驶员的感知范围外, 驾驶员将忽略该信息, 自由行驶。
(3)驾驶员对信息的处理
驾驶员对信息的处理是指驾驶员按照自身驾驶经验将感知到的速度、加速度、位置等信息进行分类, 信息所处的类别表示驾驶员应采取的驾驶决策。其中, 经验模板作为信息分类的依据, 往往具有主观性和模糊性, 致使驾驶决策之间的界限不清晰, 所以经验模板是驾驶员驾驶决策判定中的关键因素, 也是目前驾驶行为分析的研究重点。
(4)驾驶员的决策响应
驾驶员按照决策指令操作车辆。驾驶员的决策响应主要依靠驾驶员的驾驶技术和车辆性能, 驾驶技术越熟练, 就越不容易出现驾驶失误, 并且驾驶员的决策响应也将决定在紧急制动情况下驾驶员与前车之间的安全距离。
通过以上分析, 可以发现影响驾驶员驾驶决策的重要因素包括客观交通信息、驾驶员的感知范围和驾驶经验。在考虑前方车辆对驾驶决策的影响时, 客观交通信息包括前方车辆和驾驶员所驾驶车辆的速度、加速度和位置。驾驶员的感知范围由驾驶员的心理特性决定。经验模板可通过模糊聚类分析方法对数据信息样本学习得到。
在驾驶员决策框架中, 驾驶员的驾驶决策指令是驾驶员经过一系列心理活动后得出的, 驾驶员与前车之间的速度和距离变化都会对驾驶员的心理产生影响。由于驾驶员的生理、心理特性, 驾驶员的信息感知范围有限, 驾驶员对感知范围以外的因素感知程度较小, 甚至无法感知。对感知范围内的信息所引起的驾驶决策判别标准较为模糊, 决策的选择由驾驶员主观判断。因此, 首先需要确定驾驶员的心理感知范围, 进而在感知范围内对驾驶员驾驶决策进行判定分析。
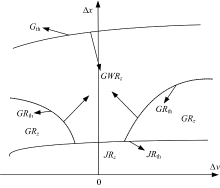
在对驾驶员心理变化进行研究时多采用生理-心理模型进行分析[11], 根据研究发现, 生理-心理模型的影响因素主要包括前后车的速度差和位移差, 如图2所示。图中, Gth为驾驶员心理感知临界值, GWRz为驾驶员感知但无响应区域, GRth为驾驶员感知响应临界值, GRz为驾驶员感知响应区域, JRth为驾驶员心理紧急响应临界值, JRz为驾驶员紧急响应区域, Δ x为驾驶员驾驶车辆与相邻车辆的相对距离, Δ v为驾驶员驾驶车辆与相邻车辆的相对速度。
 | 图2 生理-心理模型的感知临界值Fig.2 Threshold of physiological-psychological perception |
在车辆行驶过程中, 前后车的速度差和位移差将会对驾驶员产生一定的心理压力。前方车辆的速度和位置变化都将作为交通信息被驾驶员感知并接受, 然后驾驶员依据经验模板做出决策响应。驾驶员受车辆特性和自身生理特性的影响, 在感知前后车的速度差和位移差时存在两个临界值, 分别为驾驶员紧急响应临界值JRth和驾驶员感知临界值Gth。
驾驶员的紧急响应临界值由两部分构成:当前车辆同前方车辆相对静止时, 刚好不发生碰撞的间距, 以及车辆在不同速度运行下的相对停车距离。本文以道路上运行车辆的中心点作为基准点进行计算, 驾驶员在紧急响应时, 对驾驶员选择紧急制动时两个车辆的相对速度与相对位置的关系为:
式中:Δ
驾驶员感知临界值指的是两车之间的距离差或速度差大于该临界值时, 驾驶员无需获取前车的信息, 前车的运行对驾驶员不产生任何刺激, 两车之间没有相互干扰, 车辆以自由速度行驶, 小于该阈值时, 前车的运行对驾驶员产生刺激, 驾驶员根据前车的信息采取加速、减速和匀速3种决策。该阈值与驾驶员驾驶的舒适程度有关, 到达该临界值时, 完全自由行驶, 驾驶员感应响应临界值可由下式确定:
式中:vmax为该路段的设计速度; vr为该路段推荐行驶速度(自由行驶的期望速度); Kj为车流密集到车辆无法移动的堵塞密度。
通过以上对驾驶员紧急响应临界值和感知临界值的计算, 可以发现驾驶员对在紧急制动区域(0< Δ x≤ Δ
当驾驶车辆与前方车辆的相对位置在0< Δ x≤ Δ
当驾驶车辆与前方车辆的相对位置在Δ
当驾驶员收到的信息在驾驶员的感知区域内, 即:当Δ
在驾驶员心理感知区域内, 驾驶员采取的决策包括加速、减速和匀速。由2.1节可知, 在驾驶员心理感知区域内驾驶员驾驶决策判别较为模糊, 此时可用模糊聚类分析方法对信息样本进行分类, 从而划分3种决策的范围。
驾驶员获得的影响决策的信息包括车间距和前后车的速度差。驾驶员根据这两种信息决定车辆应该加速、减速和匀速跟驰。现有n个原始数据样本, 每个样本包括两种影响信息, 样本集可表示为{ai1, ai2}(1≤ i≤ n), 通过模糊聚类方法将原始数据样本分为3类, A1、A2、A3分别代表相应的驾驶决策加速、减速、匀速并且获得3种决策的特征信息矩阵V。
利用极差变换将数据标准化(j=1, 2):
建立模糊相似矩阵:
利用平方自合成方法求出模糊传递闭包t(R)=
式中:λ 为置信水平值, 0≤ λ ≤ 1。
选取适当的λ 进行聚类分析, 得到分类矩阵A和特征信息矩阵V。
设模糊分类后i类决策包括k个样本, 得到的决策矩阵为:
则该决策的特征信息矩阵为:
式中:vij为3个决策矩阵的特征信息(1≤ i≤ 3, 1≤ j≤ 2); j为信息种类; k为分类后每个决策中的样本数量。
由特征向量可以确定每个决策信息对决策的影响程度η j为:
假设驾驶员现观察到一个决策信息样本{x1, x2}, 则该样本的各个信息向量与3种决策特征信息向量的亲疏程度(1≤ i≤ 3, 1≤ j≤ 2)可表示为:
则该样本相对于3种决策的隶属度为:
式中:σ 1、σ 2、σ 3分别为该信息样本与驾驶员采取加速决策、减速决策和匀速决策的隶属程度。
令σ i=max{σ 1, σ 2, σ 3}, 则σ i为辅助系统认为3种决策中驾驶员采取的可能性最高的决策, 即对3种决策的隶属度比较后驾驶员采取隶属程度最大的决策。
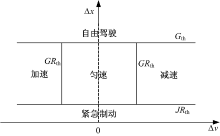
由2.1和2.2节可得驾驶员在感知范围内驾驶决策的判定方法。驾驶员的驾驶决策与两车之间的速度差和位移差的关系如图3所示。
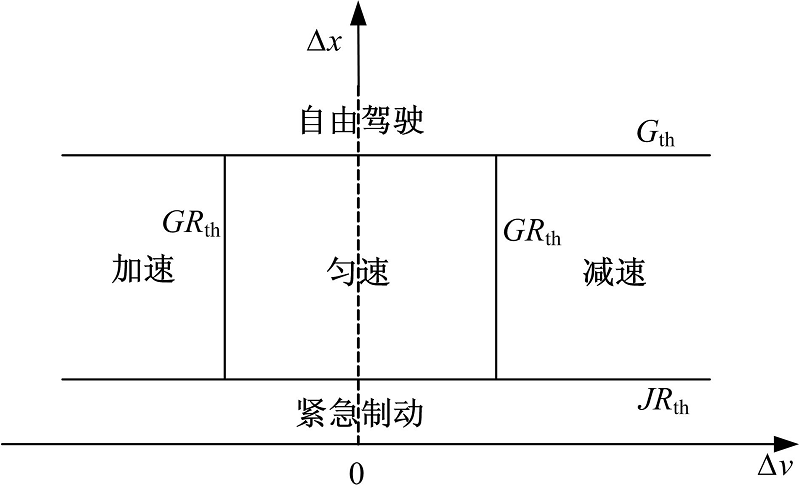 | 图3 驾驶员驾驶决策示意图Fig.3 Driver’ s driving decisions |
驾驶员在驾驶车辆行驶时, 其心理活动往往与周围路况有关, 所以车辆行驶的道路所能提供的舒适程度对驾驶员的感知范围和决策判断也会产生影响。
在城市道路中道路等级不同, 驾驶员的期望行驶速度不同, 其心理响应的临界值也不同。驾驶员会根据所处道路交通状况做出相应的临界心理表现。通过实际调查获得主次干路和支路的最大设计速度、机动车的制动加速度、驾驶员期望行驶速度以及车流堵塞密度, 如表1所示。
| 表1 交通基本数据 Table 1 Traffic basic data |
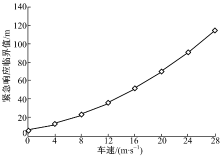
若前方车辆紧急制动至静止时, 即在Δ v=vc, a0=0, Δ a=ac, max的情况下, 驾驶员紧急响应临界值变化主要由此时驾驶员驾驶车辆的速度决定。机动车速度越大, 所需的制动距离就越长, 驾驶员所要感知的紧急制动范围就越大。根据驾驶员心理紧急响应临界值, 计算不同车速下驾驶员心理紧急响应临界值。机动车在不同速度下驾驶员心理紧急响应临界值的变化趋势如图4所示。
 | 图4 驾驶员心理紧急响应临界值变化Fig.4 Trend of driver psychological emergency response threshold |
随着驾驶速度的不断增大, 为了避免出现突发状况时发生车辆相撞, 车辆之间必须拥有充足的制动距离, 由于车辆制动性能的限制, 驾驶员的紧急响应临界值会不断增大。
不同道路等级条件下, 由于最初道路设计速度不同, 驾驶员对行驶速度和到达目的地的时间要求也会产生变化。道路等级越高, 其设计速度越大, 驾驶员所期望的行驶速度越大。根据驾驶员心理感知临界值, 计算不同设计速度下驾驶员心理紧急响应临界值。道路等级对驾驶员心理感知临界值的影响如图5所示。
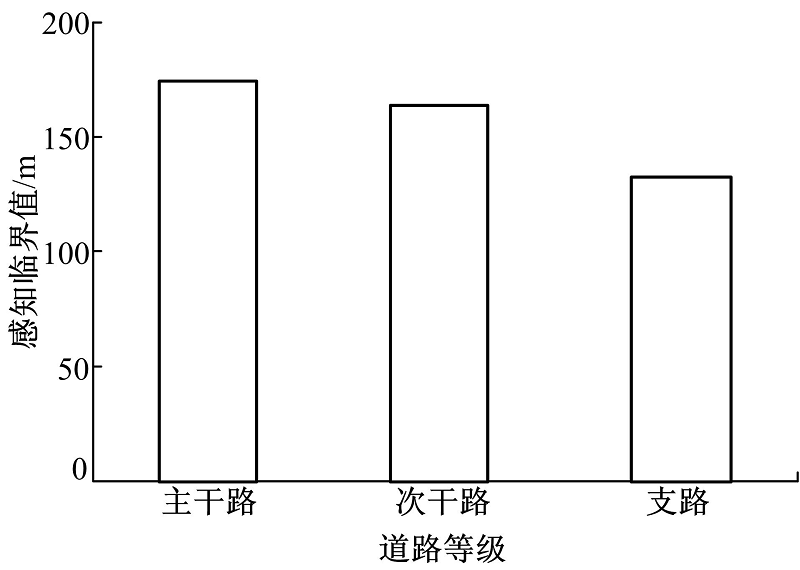 | 图5 驾驶员心理感知临界值变化Fig.5 Trend of driver psychological perception threshold |
在不同等级道路上驾驶员对期望行驶的速度的要求不同, 当车辆以较高的期望速度运行时, 驾驶员出于安全考虑, 会扩大可自由行驶感知范围, 以便获取更多的信息。在主干路上驾驶员感知范围最大, 次干路次之, 支路上驾驶员感知范围最小。
(1)确定了驾驶员感知临界值和紧急响应临界值, 划分了机动车自由行驶区域、紧急制动区域以及前后车相互影响区域, 并在相互影响区域利用模糊聚类方法对加速、减速以及跟驰的驾驶决策进行分类, 建立了在前车影响下驾驶员采取加速、减速、匀速、自由驾驶以及紧急制动决策判别模型。通过实验发现, 驾驶员心理感知范围并不只是驾驶员视觉上对距离的感应, 在不同速度条件下驾驶员心理也会发生很大变化。
(2)该判定方法简单、直观、可移植性强, 能够较好地体现驾驶员采取的决策行为, 但需要大量的数据样本进行参数标定和模型验证, 对道路上较大范围内的车辆运行位置、速度和加速度等数据采集要求较高。在逐步完善数据后, 模型的适用性和稳定性有待进一步验证。
(3)本文主要研究了驾驶员前方车辆的运行状况对自身心理和驾驶决策的影响, 尚未考虑侧向车辆影响下的驾驶员换道时机、换道方向和换道决策的判定, 针对驾驶员换道决策的影响因素和决策判定是下一步研究的内容。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|