

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
重型车液力自动变速器控制系统设计及试验
[马文星1  , 张雁
, 张雁1 , 雷雨龙2 ]
, 张雁]
|
|


作者简介:马文星(1962-),男,教授,博士生导师.研究方向:液力传动与自动变速.E-mail:mawx@jlu.edu.cn
针对某型装有液力自动变速器的重型载重汽车,设计了电控系统的TCU硬件电路实现方案,在其内部固化了各种控制程序,包括换挡控制、闭锁离合器控制、液力缓速器充排油控制、换挡品质控制等;采用分层、分模块方式开发了电控系统的软件。制定了重型车两参数自动换挡策略,结合台架试验,最终实现功能验证。结果表明,所设计的电控系统软硬件能够实现对自动变速箱的综合控制,并且能够改善换挡质量。
The hardware circuit implementation scheme of TCU of the electric control system for a certain type heavy vehicle with hydrodynamic automotive transmission was designed. In this scheme various control procedures were cured, including shift control, lockup clutch control, filling and emptying oil of hydrodynamic retarter control, shift quality control and so on. The software of the electronic control system was developed by layered and sub-module method. Automatic shift strategy with two parameters was formulated and combined with the bench test, which finally realized the functional verification. The testing results show that the designed hardware and software of the electronic control system can realize the integrated control of the automatic transmission and improve the shift quality.
目前国内生产的重型汽车多采用手动变速, 这主要是由于国内对于自动变速技术核心部分的研究尚不够成熟, 不具备自主知识产权。当前我国已装备有自动变速器的重型汽车, 其自动变速器主要依赖进口或与国外合资生产, 所涉及到的核心技术主要掌握在欧美和日本等国家。虽然在重型车自动变速技术的理论研究方面, 国内对换挡规律[1, 2]、换挡过程控制[3, 4]以及电控系统[5, 6, 7]的研究取得了一定的成果, 但在实际应用方面与国外仍存在较大差距[8, 9, 10, 11, 12, 13]。为实现重型车的自动变速, 本文设计了某重型车变速箱的电控系统, 并在台架上进行了试验, 实现了功能验证。
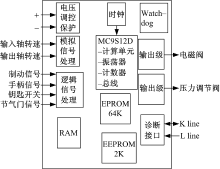
电控系统将接收到的各种传感器信号和CAN总线发送的信息送到变速箱控制单元(Transmission control unit, TCU)中, TCU将输入的信号与事先存储在电控单元中的程序进行比较, 然后向相应的电磁阀发出指令, 接通或切断流向换挡阀等的压力油, 使相应的离合器和制动器得到控制, 从而精确地控制换挡时机和闭锁离合器等工作。电控系统的结构组成如图1所示。
 | 图1 电控系统结构组成Fig.1 Structure of electronic control system |
设计的电控系统硬件主要由输入装置、输出装置和变速器控制单元3部分组成。输入装置主要包括各种传感器和开关, 其中传感器为变速箱控制单元提供连续可变的电信号, 而开关提供简单的开关信号。在此次开发的自动变速器电控系统中主要包含用于测量各离合器和制动器压力的压力传感器和用于测量变速器和缓速器油温的油温传感器。输出装置主要是电磁阀。根据变速器控制单元发出的指令, 电磁阀开启或闭合, 从而接通或切断相应的油道。
变速箱控制单元作为电控系统的核心, 在其内部固化了各种控制程序, 以实现对变速箱的换挡控制、闭锁离合器控制、液力缓速器充排油控制和换挡品质控制等。本电控系统中的TCU采用MC9S12XDT256作为主运算单元, 其外围需要提供开关量、频率量和模拟量输入的电路以及稳压电源电路, 并且还需要用于提供外部通信(CAN线)、PWM电磁阀和比例电磁阀驱动的电路, 所开发的变速箱控制单元的结构示意图如图2所示。
 | 图2 TCU结构示意图Fig.2 Structure diagram of TCU |
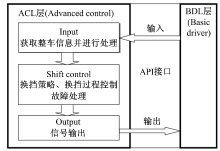
软件运行载体为变速箱控制单元。软件采用分层、分模块方式开发。从层次结构以及开发环境上划分, 软件分为BDL层(Basic drivers layer, 基本驱动层)和ACL层(Advanced control layer, 高级控制层), 两层通过API(Applications interface, 应用接口)实现连通并协调工作。其中, BDL层软件采用嵌入式C语言开发, 负责TCU的初始化、设备驱动等工作, 对外界保持统一的接口, 供上层调用; ACL层使用MATLAB Simulink/Stateflow开发, 利用RTW(Real-time workshop)工具自动生成代码, 连同BDL层在Freescale(飞思卡尔)Code-Warrior平台上进行编译, 负责上层控制策略, 完成挡位决策、换挡控制、容错处理等功能。软件架构如图3所示。其中, Input模块对获取的整车信息进行滤波、标度转换和故障识别, Output模块输出信号用于执行机构、继电器的控制以及CAN信息的传递。Shift control模块是程序的控制中心, 主要由初始化模块、自检模块、关电模块、故障处理模块、换挡策略模块、换挡过程控制模块以及换挡过程失败处理模块组成。
 | 图3 TCU软件架构Fig.3 Software architecture of TCU |
AT换挡分为TCU换挡请求、降低发动机转矩、根据换挡逻辑控制离合器接合和关闭、恢复发动机转矩4个阶段。降低发动机转矩可减小离合器接合时的滑磨功和冲击度, 以降低换挡冲击。
换挡策略主要为协同部分工况识别的两参数换挡规律, 即基于车速、油门开度并考虑各个工况所确定的换挡规律, 主要包括升挡规律、降挡规律、负载识别、换挡延迟等模块。升挡规律主要依据车速及油门开度, 当达到某一油门开度所对应的车速时即发出升挡指令, 通常小油门开度以舒适、稳定、少污染为主, 故小油门对应经济性换挡; 大油门开度时以车辆获得最佳的动力性为主, 故大油门对应动力性换挡, 升挡不能跳挡。降挡规律主要依据车速, 并介入油门开度、刹车, 设置包括缓减速、急减速、加速降挡在内的不同工况的降挡点, 当车速降到降挡点以下时发出降挡指令, 其中急减速时不进行换挡, 可跳挡。负载识别模块主要通过识别道路坡度和车辆载荷, 从而修正换挡规律, 使挡位符合车辆工况。换挡延时模块主要为在通过换挡规律计算发出换挡指令时根据各工况延迟一定时间再进行换挡, 以防止各工况短时间的来回切换造成的频繁换挡。
考虑到重型车行驶条件复杂, 载荷波动频繁, 所开发的液力机械变速器采用等延迟型两参数换挡规律, 换挡参数选择最常用的车速和油门开度, 换挡规律的确定基于以下整车动力学参数:总质量为25 000 kg, 车轮滚动半径为0.573 m, 传动系效率为0.85, 滚动阻力系数为0.000 222+0.0151ua, 空气阻力系数为0.9, 迎风面积为10.5 m2, 主减速比为6, 倒挡传动比为5.08, 1挡~6挡传动比分别为3.947、2.659、2.012、1.355、1、0.6736。
为了保证车辆的最佳动力性, 升挡点取同一油门开度下相邻两挡加速度曲线的交点, 整车的加速度表达式为:
式中:δ 为重型车旋转质量换算系数; Ft为牵引力; Ff为滚动阻力; Fw为空气阻力。
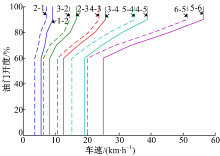
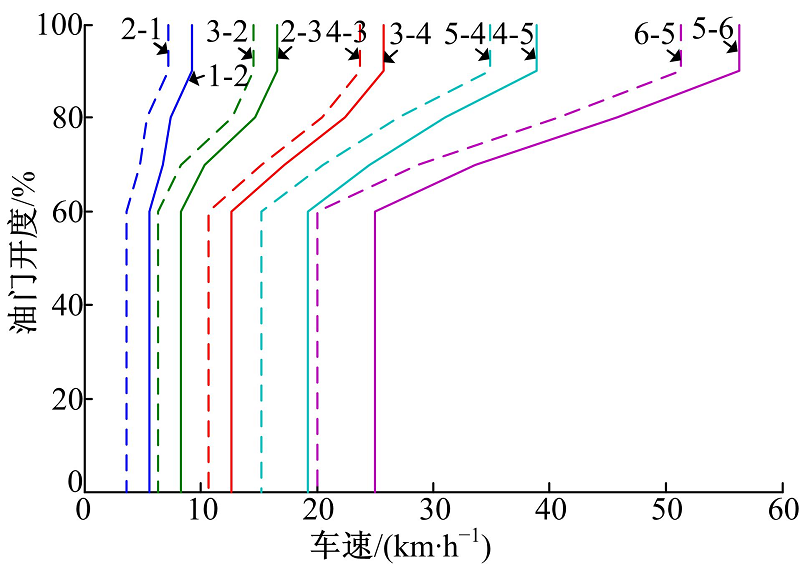 | 图4 液力工况下的换挡规律Fig.4 Shift schedule under hydrodynamic condition |
按式(2)求解不同油门开度下相邻两挡加速度曲线的交点, 即可获得液力工况下的换挡规律, 如图4所示。
式中:an, α (v)为油门开度为α 时n挡的加速度随车速的变化关系; an+1, α (v)为油门开度为α 时n+1挡的加速度随车速的变化关系。
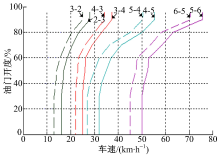
闭锁工况换挡规律的确定过程与液力工况的确定过程一致, 由于1挡始终工作在液力工况下, 因此1挡的换挡点不变化, 在确定闭锁工况的换挡规律时, 不再计算1挡的换挡点和换挡曲线。为了保证车辆的最佳动力性, 若同一油门开度下相邻两挡的加速特性曲线有交点, 则应选取该交点对应的速度作为该油门开度下的升挡点; 若同一油门开度下相邻两挡的加速特性曲线没有交点, 则应选取该挡位所在油门开度下的最大车速点作为升挡点。图5为按上述原则确定的闭锁工况下的换挡规律。
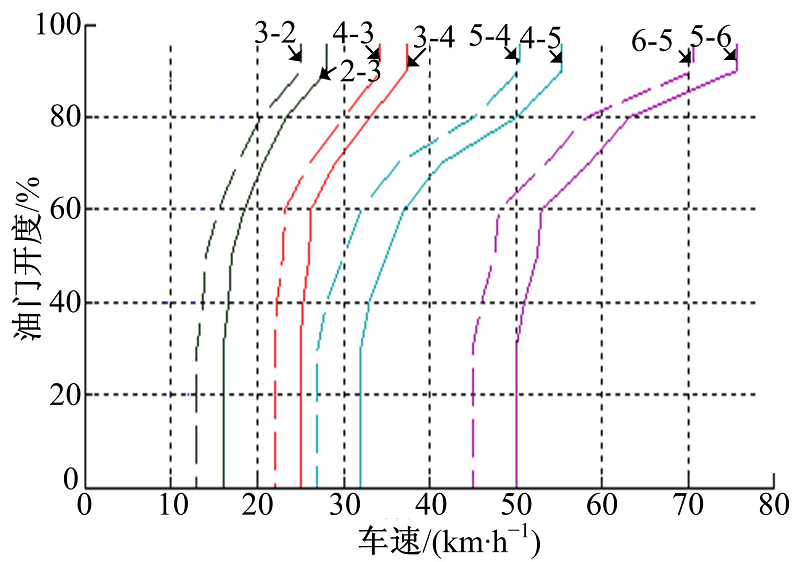 | 图5 闭锁工况下的换挡规律Fig.5 Shift schedule under lockout condition |
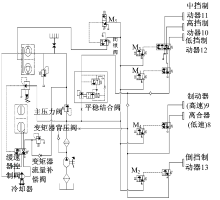
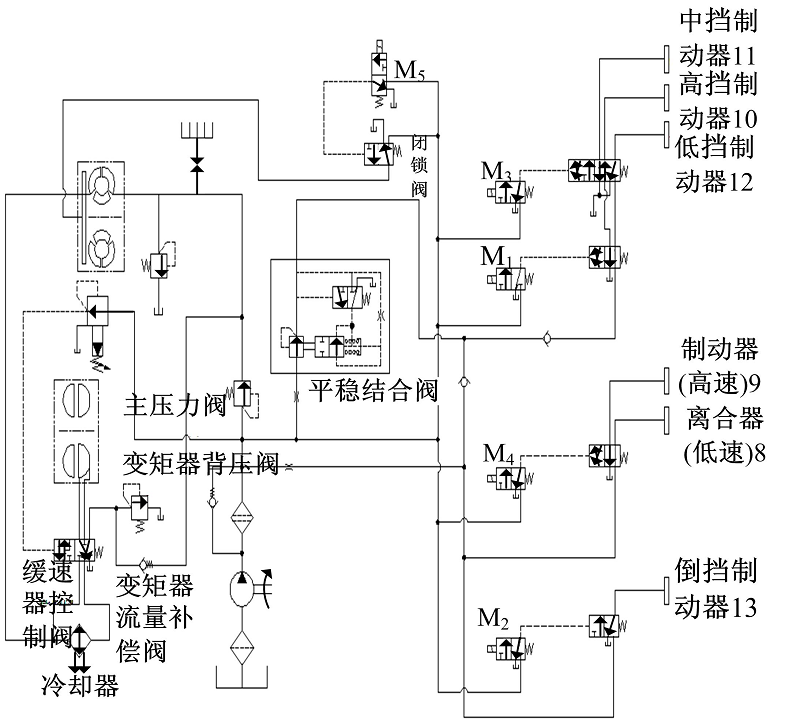 | 图6 液压系统原理图Fig.6 Principle diagram of the hydraulic system |
液力自动变速器的液压系统原理图如图6所示, 采用主调压阀控制系统的操纵压力, 并通过溢流将多余的工作液提供给润滑点、液力变矩器和液力减速器; 4个失电常闭式开关电磁阀M1~M4控制挡位阀与换挡结合元件8~13的连接状态, 从而实现变速器的6个前进挡、1个倒退挡和1个空挡, 各个挡位接合的控制元件如表1所示。
此液力机械自动变速器采用电液操纵完成变速器动力换挡、闭锁离合器结合与分离、液力变矩器供油、液力减速器控制及润滑功能, 要求系统操纵油压为1.2~1.68 MPa, 润滑油压为0.21 MPa, 换挡离合器结合时间为0.8~1.8 s, 换挡过程要平稳。
| 表1 换挡控制逻辑 Table 1 Shift control logic |
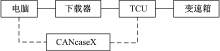
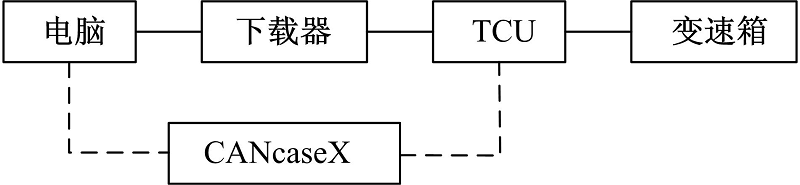 | 图7 实验系统连接示意图Fig.7 Connection diagram of experimental system |
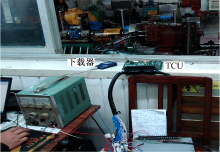
在自动变速试验台上进行了电控系统功能试验, 试验目的有两个, 一是调试TCU底层, 验证TCU能否正常工作, 二是调试控制程序, 验证控制程序能否实现换挡功能[14, 15, 16]。实验仪器及设备包括用于编译程序、下发控制指令、监控数据的笔记本电脑, 用于将程序下载至TCU中并通过BDM口调试程序的P& E USB Multilink下载器, 以及用于建立计算机与TCU二者之间的通信连接的Vector CANcaseXL等。试验软件工具包括用于图形化算法设计和建模的Simulink/Stateflow, 用于编辑、编译、连接程序的Freescale CodeWarrior IDE, 以及用于下发控制指令、监控运行变量的Vector CANape。实验系统的连接如图7所示, 图中实线连接部分为电气连接, 虚线连接部分为通信连接。程序通过电脑和下载器下载到TCU中, 由电脑控制程序的执行; 通过TCU中的控制程序实现对电磁阀的占空比控制, 同时电脑通过CANcaseXL监控程序的运行, 下发控制指令, 采集数据。图8为自动变速试验台, 图9为试验台电控部分。
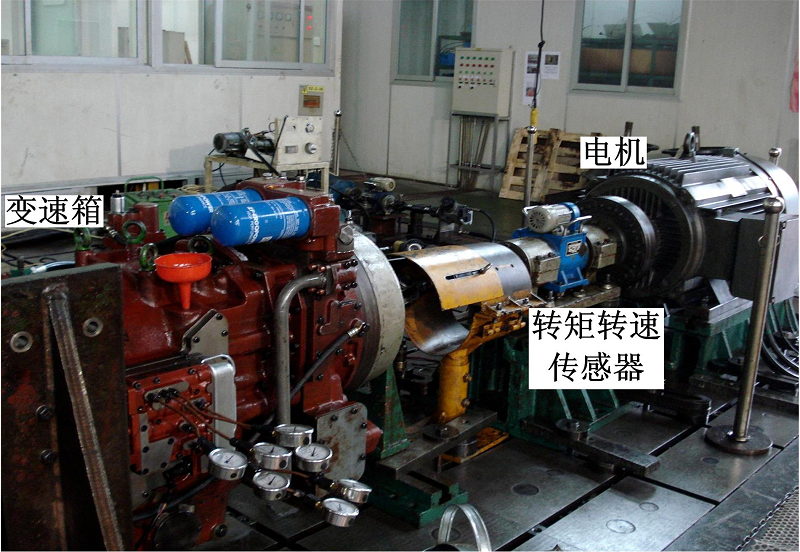 | 图8 自动变速试验台Fig.8 Test bench of automatic transmission |
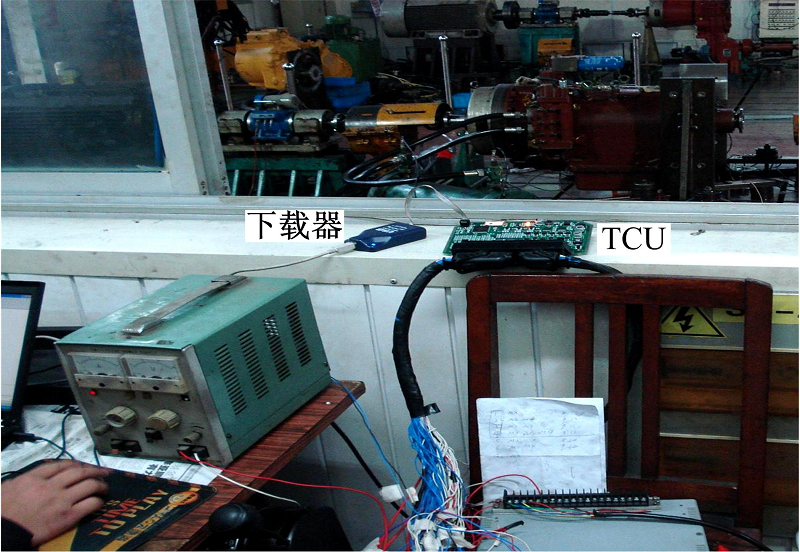 | 图9 试验台电控部分Fig.9 Electrical control part of test bench |
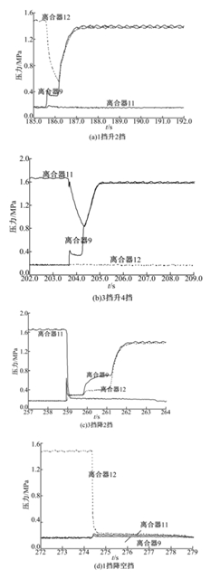
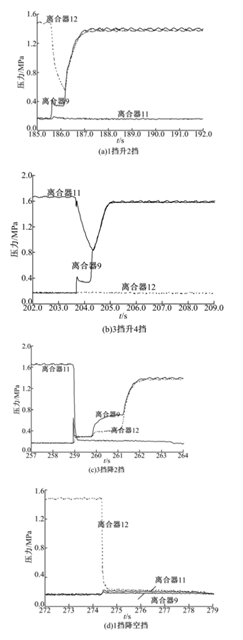
对AT变速箱进行了N-1-2-3-4挡和4-3-2-1-N挡的循环换挡试验, 论文中选取部分试验结果, 如图10所示。图中粗实线代表离合器9的压力变化, 细实线代表离合器11的压力变化, 虚线代表离合器12的压力变化。图10(a)为1挡升2挡离合器压力变化曲线, 其中离合器9和12有压力; 图10(b)为3挡升4挡离合器压力变化曲线, 其中离合器9和11有压力; 图10(c)为3挡降2挡离合器压力变化曲线, 其中离合器9和12有压力; 图10(d)为1挡降空挡离合器压力变化曲线, 此时无压力。
试验结果表明:CANape能接收到CAN总线的信息, TCU的总线功能正常; TCU控制传感器的电压为5 V, 表明TCU可以正常驱动传感器; 电磁阀通断正常, 表明TCU可以正常控制电磁阀; TCU可以控制主油路的工作油压, 同时因为平稳结合阀的作用使得在换挡过程中油压上升有缓冲过程, 故换挡过程平稳、无动力中断。
根据重型车的特点, 制定了详细的TCU硬件电路实现方案, 实现对变速箱的综合控制。在换挡过程中, 变速箱控制单元降低发动机转矩, 同时对换挡时的主油路工作油压进行控制, 以保证换挡平稳、无冲击, 提高乘坐舒适性。采用分层、分模块方式开发TCU软件; 制定了重型车自动换挡的换挡策略, 并在台架上进行了试验, 实现了功能验证。结果表明, 所开发的重型车电控单元软硬件能够实现联合控制。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|