




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于驾驶意图的插电式混合动力汽车能量管理策略
[秦大同 , 杨官龙, 胡明辉, 刘永刚, 林毓培]
, 杨官龙, 胡明辉, 刘永刚, 林毓培]
, 杨官龙, 胡明辉, 刘永刚, 林毓培]
|
|


作者简介:秦大同(1956-),男,教授,博士生导师.研究方向:智能传动与控制.E-mail:dtqin@cqu.edu.cn
为了使插电式混合动力汽车(PHEV)在不同驾驶意图下合理使用电池电能以获得更好的能耗经济性,采用模糊推理控制器识别驾驶员意图,依据混合动力系统的动力耦合方式、电池荷电状态(SOC)及发动机特性曲线进行工作模式划分,建立能耗经济性目标函数,运用瞬时优化方法进行发动机和电机转矩分配,在此基础上提出了基于驾驶意图的能量管理策略。利用Matlab/Simulink仿真平台搭建整车模型,在新欧洲驾驶循环(NEDC)工况下进行仿真分析,结果表明:采用该能量管理策略可以实现发动机和ISG电机的优化控制,使发动机的工作点总体运行在高效区;与电量消耗(CD)-电量维持(CS)模式的能量管理策略相比,百公里油耗降低了8.24%。通过整车道路试验对所提出的能量管理策略的有效性进行验证,结果表明:采用该能量管理策略的插电式混合动力汽车的百公里油耗较原汽油车降低32.93%。
In order to obtain good energy consumption economy for Plug-in Hybrid Electric Vehicle (PHEV) and reasonably distribute battery power under different driving condition, a fuzzy inference controller is used to identify the driver's intention. The working mode is partitioned according to the hybrid system dynamic coupling mode, the State of Charge (SOC) of the battery and the engine working characteristic curve. Then, instantaneous optimization method is used to distribute engine and motor torque, in which the energy consumption economy is taken as the objective function. Finally, the energy management strategy based on driving intention is proposed. A vehicle model is built on the Matlab/Simulink platform, and simulated under New European Driving Cycle (NEDC) condition. Simulation results indicate that the proposed strategy can realize the optimization control of the engine and ISG motor and keep the engine operation points within the peak efficiency region. The fuel consumption per 100 km is saved by 8.24% in comparison with the energy management strategy of the charge depleting and charge sustaining mode. In order to further verify the proposed energy management strategy, vehicle road test is conducted, and results show that the fuel consumption per 100 km is reduced by 32.93% compared with prototype gasoline vehicle.
插电式混合动力汽车(Plug-in hybrid electric vehicles, PHEV)具有通过外部电网充电的特点, 在行驶距离较短时主要通过电机驱动, 可充分利用低成本电能并大幅度降低空气污染; 在行驶距离较长时使用混合动力模式, 在有效降低油耗的同时保证了汽车的续驶里程。因此得到了汽车制造企业、科研机构及各国政府的普遍关注。
能量管理策略是PHEV的关键技术, 主要分为瞬时优化能量管理策略、全局优化能量管理策略和基于规则的能量管理策略3类[1]。瞬时优化能量管理策略[2, 3, 4, 5]和全局优化能量管理策略[6, 7, 8, 9, 10, 11]可实现较优的能耗经济性, 但由于计算时间较长, 实时性较差。基于规则的能量管理策略简单易行, 实用性强, 广泛应用于混合动力汽车的实际能量管理中, 但能耗经济性不如前两类控制策略。Banvait[12]和张志[13]提出了以电量消耗(Charge depleting, CD)为主的能量管理策略, 在一定程度上改善了燃油经济性, 但采用该能量管理策略的缺点是行驶里程较长时能耗经济性较差, 罗国鹏等[14]提出了基于最佳电能使用的能量管理策略, 在可预知的行程里提高整车的能耗经济性, 但不能保证在不可预知行程范围的能耗经济性; 周能辉等[15]提出以加速踏板开度为模式切换参数的能量管理策略, 但发动机在低效区运行的时间较长。
上述基于规则的能量管理策略的主要思路是电池荷电状态(State of charge, SOC)较高时采用电量消耗模式。当电池SOC降到一定程度时, 采用电量维持(Charge sustaining, CS)模式, 而采用此种能量管理策略在不同驾驶意图下没有合理使用电池电能, 不能使PHEV的能耗经济性得到充分发挥。假如在一段行驶里程初期, 驾驶员主要采用中等负荷油门踏板, 车速较高; 在行驶里程末期, 驾驶员主要采用小负荷油门踏板, 车速较低。在此情况下, 电池电量主要消耗在中等负荷油门踏板区域, 而此时发动机却可以保证较高的效率; 而当油门踏板负荷较小时, 电池电量已消耗至低限值, 只能主要由发动机驱动, 使效率变低, 导致能耗经济性变差。鉴于此, 本文提出了基于驾驶意图的能量管理策略, 在引入驾驶意图的基础上, 通过对燃油能量和电池电能使用的合理分配来提高整车的能耗经济性。本文的基本思路是:采用模糊推理控制器识别驾驶员的意图, 根据插电式混合动力系统的动力耦合方式、发动机特性曲线和电池SOC进行工作模式划分, 建立能耗经济性的目标函数, 运用瞬时优化方法进行发动机与电机转矩分配, 从而构建了基于驾驶意图的能量管理策略, 并对该能量管理策略进行了仿真分析评价和实车试验验证。
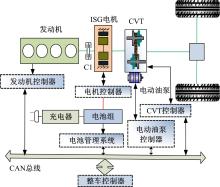
本文研究的PHEV动力系统结构如图1所示。系统主要由发动机、ISG(Integrated starter/generator)电机、湿式多片离合器C1、机械无级变速器(Continuously variable transmission, CVT)、电动油泵、电池组、充电器等部件组成。整车和动力系统参数如表1所示。
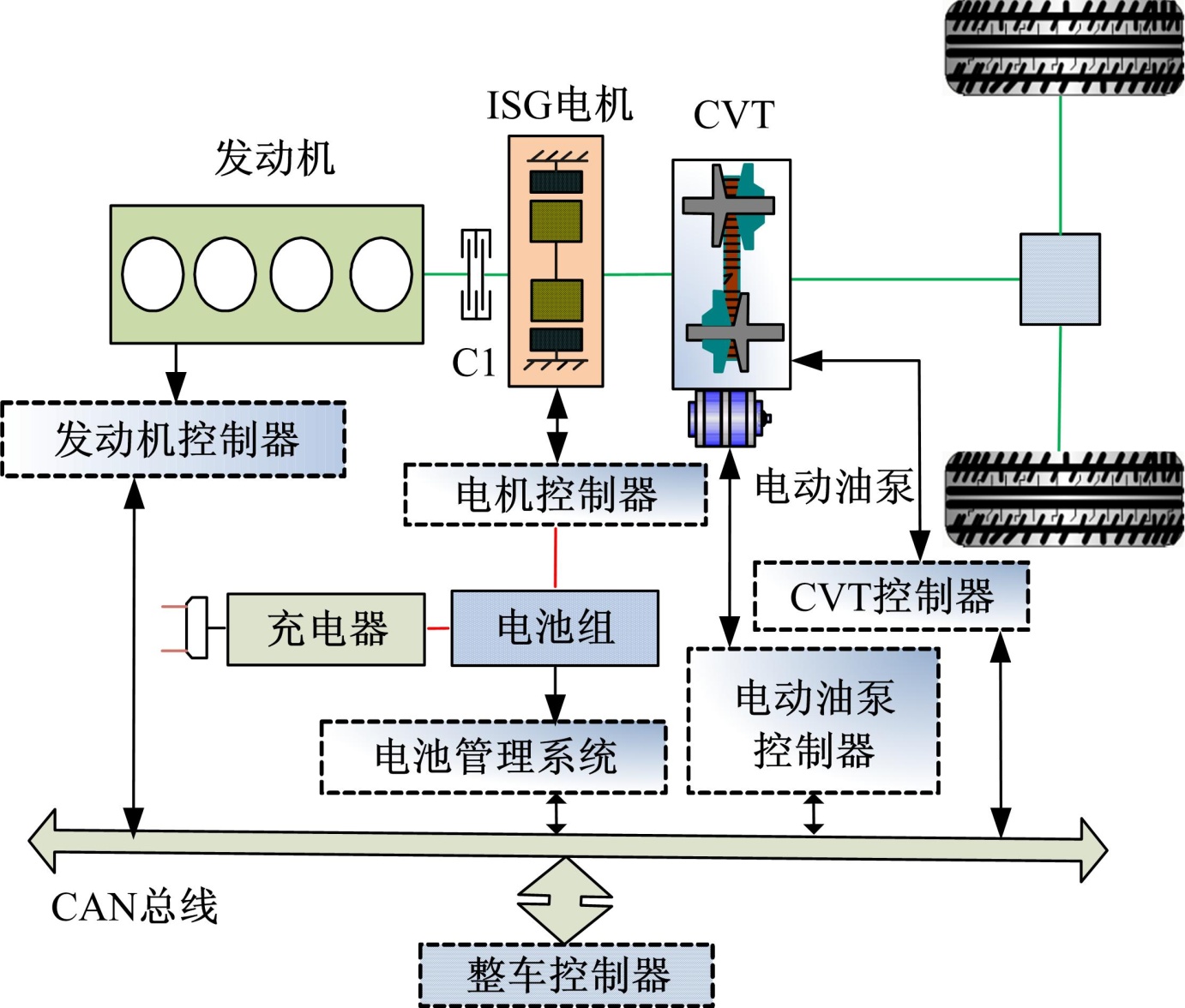 | 图1 PHEV动力系统Fig.1 Powertrain of PHEV |
| 表1 PHEV动力系统参数 Table 1 Parameters of PHEV powertrain |
图1中整车控制器通过控制湿式多片离合器C1的结合与分离实现ISG电机起动发动机和整车工作模式的切换; 通过控制电动油泵的运转实现低转速时蓄能器油压与CVT油压的建立; 通过CAN总线实现整车控制器与发动机控制器、电机控制器、电池管理系统、CVT控制器的通信, 监测车辆的运行状态, 完成电机、发动机工作模式和转矩、转速的控制。
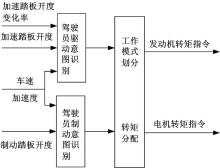
为了提高能耗经济性, 本文制定能量管理策略的思路是:基于驾驶员操作意图, 根据系统的动力耦合方式、发动机特性曲线和电池SOC进行工作模式划分, 建立能耗经济性目标函数, 运用瞬时优化方法进行发动机与电机转矩分配。其基本控制策略如图2所示, 该策略包含3个部分:①驾驶员驱动意图识别; ②驾驶员制动意图识别; ③工作模式划分及转矩分配。
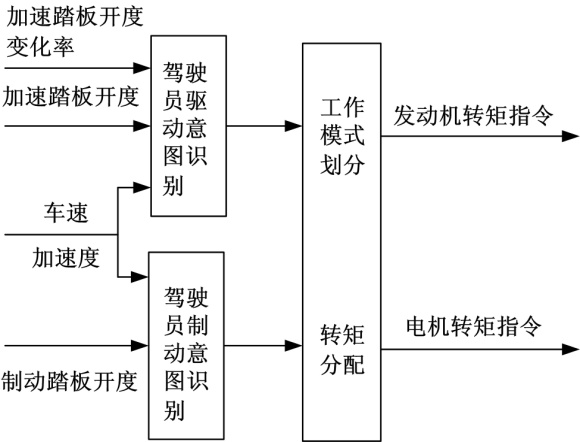 | 图2 基于驾驶意图的控制策略Fig.2 Control strategy based on driving intention |
1.2.1 驱动意图识别
驶员驱动意图主要包含起步意图、加速意图和巡航意图。其中加速意图可进一步细分为一般加速、平缓加速、急加速; 巡航意图可进一步细分为低速巡航、中速巡航、高速巡航。
本文驱动意图识别采用模糊推理控制器, 输入变量为车速、加速度、加速踏板开度、加速踏板开度变化率; 输出变量为驾驶员驱动意图。
车速的语言变量为:{很小(VS), 小(S), 中(M), 大(B)}, 论域为0到160。
加速度的语言变量为:{负大(NB), 负中(NM), 负小(NS), 零(Z), 正小(PS), 正中(PM), 正大(PB)}, 论域为-3到3。
加速踏板开度的语言变量为:{零(Z), 小(S), 中(M), 大(B)}, 论域为0到100。
加速踏板开度变化率的语言变量为:{负大(NB), 负中(NM), 负小(NS), 零(Z), 正小(PS), 正中(PM), 正大(PB)}, 论域为-100到100。
输入变量的隶属度函数如图3所示。模糊规则的形式为“ if…and…then…” , 一共有19条控制规则。在系统模型建立后, 为了达到良好的控制效果, 对隶属度函数进行多次修正, 最终确定驾驶员驱动意图模糊规则库, 如表2所示。
 | 图3 驱动意图输入变量的隶属度函数Fig.3 Membership function of input variables about driving intention |
| 表2 驱动意图模糊规则库 Table 2 Fuzzy rules of driving intention |
从表2可以看出, 起步意图的识别通过车速一个参数完成。加速意图的识别通过加速度、加速踏板开度和加速踏板开度变化率3个参数完成。当加速度为PS、加速踏板开度为S、加速踏板开度变化率为PS、PM、PB时, 定义加速意图为平缓加速; 当加速度为PS、加速踏板开度为M、加速踏板开度变化率为PS时, 定义加速意图亦为平缓加速; 当加速度为PM、加速踏板开度为M、加速踏板开度变化率为PM、PB时, 定义加速意图为一般加速; 当加速度为PM、加速踏板开度为B、加速踏板开度变化率为PS时, 定义加速意图仍为一般加速; 当加速度为PB、加速踏板开度为B、加速踏板开度变化率为PM、PB时, 定义加速意图为紧急加速。
巡航意图的识别通过车速、加速度和加速踏板开度变化率3个参数完成。当车速为S、加速度为Z、加速踏板开度变化率为NS、Z、PS时, 定义为低速巡航; 当车速为M、加速度为Z、加速踏板开度变化率为NS、Z、PS时, 定义为中速巡航; 当车速为B、加速度为Z、加速踏板开度变化率为NS、Z、PS时, 定义为高速巡航。
1.2.2 制动意图识别
本文研究的PHEV动力系统采用并联式制动系统, 当驾驶员踩下制动踏板时, 便存在摩擦制动。故驾驶员的制动意图主要分为滑行再生制动(驾驶员未踩下制动踏板和加速踏板, ISG电机发电)、再生制动(驾驶员踩下制动踏板, ISG电机发电和摩擦制动并存)及摩擦制动(仅存在摩擦制动), 其中制动意图识别采用mamdani型模糊控制算法, 输入参数包括车速和制动踏板开度; 输出参数为驾驶员制动意图。
车速的语言变量为:{小(S), 中(M), 大(B)}, 论域为0到160。
制动踏板开度的语言变量为:{零(Z), 小(S), 中(M), 大(B)}, 论域为0到100。
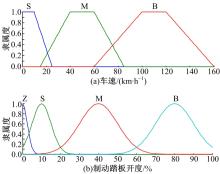
输入变量的隶属度函数如图4所示。模糊规则的形式为“ if…and…then…” , 一共有11条制动意图控制规则, 如表3所示。
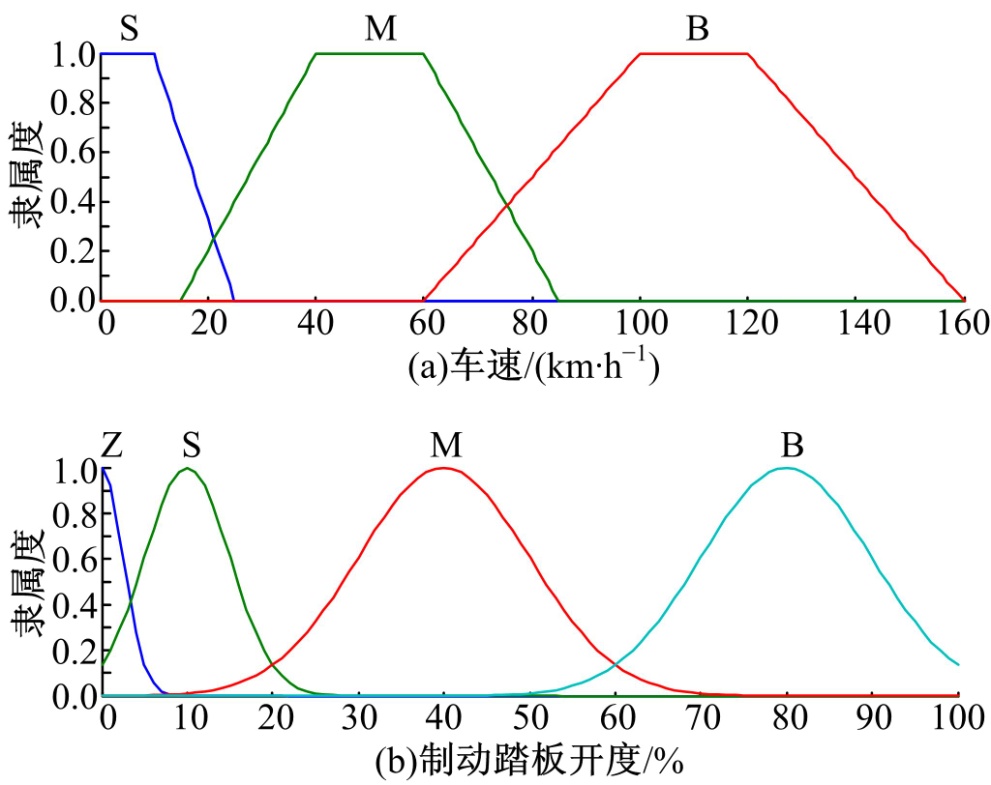 | 图4 制动意图输入变量的隶属度函数Fig.4 Membership function of input variables about braking intention |
| 表3 制动意图模糊规则库 Table 3 Fuzzy rules of braking intention |
从表3可以看出, 机械制动意图识别通过制动踏板开度一个参数完成; 滑行再生制动和再生制动意图识别通过车速和制动踏板开度两个参数完成, 当车速为B、制动踏板开度为Z时, 定义制动意图为滑行再生制动; 当车速为B、制动踏板开度为S、M、B时, 定义制动意图为再生制动。
1.2.3 工作模式划分
(1)起步意图特征为车速较低, 考虑到发动机此时的效率低, 进入纯电动模式。
(2)平缓加速时, 为了提高整车的能耗经济性, 使发动机一直工作在最优区域内, 发动机的工作点通过ISG电机调节。若发动机最优输出扭矩Tebest大于需求扭矩Treq, 且电池SOC小于目标值SOCobj时, 进入行车充电模式; 若SOC大于目标值SOCobj时, 进入纯电动模式。
(3)一般加速时, 若SOC大于SOCobj时, 进入纯电动模式; 若SOC小于SOCobj且Treq小于Tebest时, 进入行车充电模式; 若Treq进入最优区域时则进入发动机单独驱动模式; 若SOC小于SOCobj且Treq大于Tebest时, 进入混合驱动模式。
(4)急加速时, 驾驶员需求扭矩较大, 进入混合驱动模式。若SOC出现小于CS模式下限值SOCdown时, 可以进行过度放电至最低值SOClow; 若还需继续放电, 则进入发动机单独驱动模式, 通过提高发动机的负荷来满足驾驶员的扭矩需求。
(5)低速巡航时, 若SOC大于目标值SOCobj, 则由电机单独驱动; 若SOC小于目标值SOCobj, 则进入行车充电模式。
(6)中速巡航时, 发动机处于最优区域, 由发动机单独驱动车辆。
(7)高速巡航时, 需求扭矩较大。若SOC大于CS模式下限值SOCdown时, 进入混合驱动模式; 若SOC小于CS模式下限值SOCdown时, 通过提高发动机的负荷来满足驾驶员的扭矩需求, 进入发动机单独驱动模式。
(8)再生制动和滑行再生制动时, 电机处于发电模式, 进行能量回收。此时若湿式多片离合器处于结合状态时, 则保持其结合且对发动机进行断油控制, 发动机进行反拖, 避免驱动模式与制动模式切换时因频繁起动发动机造成整车油耗的增加。
(9)机械制动时, 电机处于零扭矩模式, 其转子充当惯性飞轮。若湿式多片离合器处于结合状态, 则不进行分离且对发动机进行断油控制, 发动机进行反拖; 若车速降低使发动机转速低于怠速最小值时, 则分离湿式多片离合器并对发动机进行停机控制。
1.2.4 转矩分配
(1)PHEV进入纯电动模式时:电机转矩Tm=Treq,
(2)PHEV进入发动机单独驱动模式时:Tm=0, Te=Treq;
(3)PHEV进入联合驱动模式时, 为了提高能耗经济性并合理分配发动机与电机转矩, 采用瞬时优化迭代方法进行扭矩分配。
定义目标函数J为发动机消耗的燃油成本和电机消耗的电能成本之和:
式中:Ce为每度电的价格, 元/度; Pm为电机消耗的功率, kW; η g为电网的充电效率, 取0.98; η m为ISG电机的效率; Cf为每升油的价格, 元/L; Lf为燃油消耗率, L/s; η b为电池的充放电效率, 即:
式中:η 为电池的效率。
需要指出的是, 当整车进入行车充电模式时, 此时充入电池的能量来自于燃油而不是电网, 这部分能量成本由式(3)计算:
转矩分配的结果如图5所示。
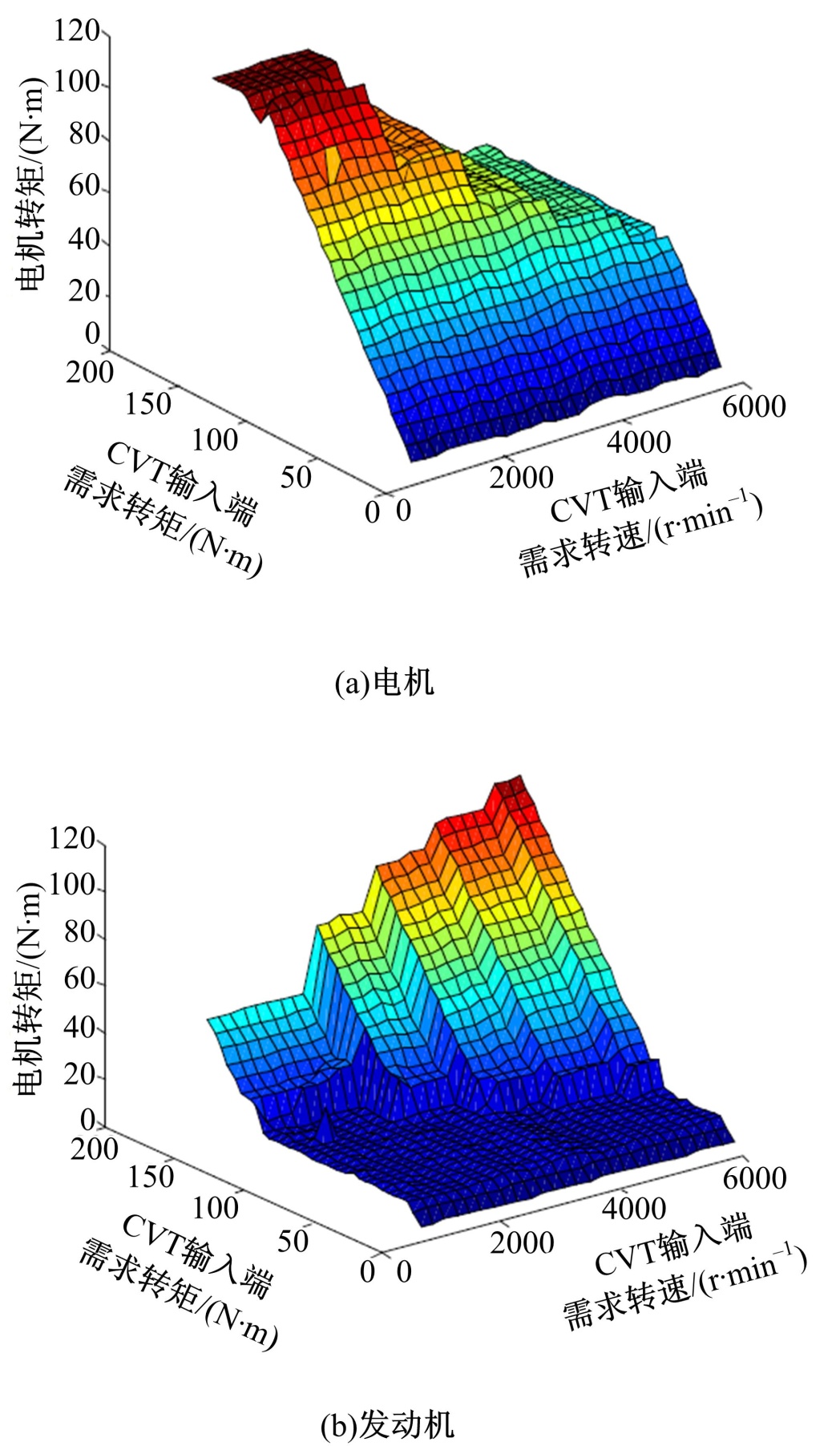 | 图5 电机和发动机转矩(混合驱动)Fig.5 Motor and engine torque of hybrid mode |
(4)PHEV进入行车充电模式时, 同样采用瞬时优化迭代方法进行扭矩分配, 结果如图6所示。
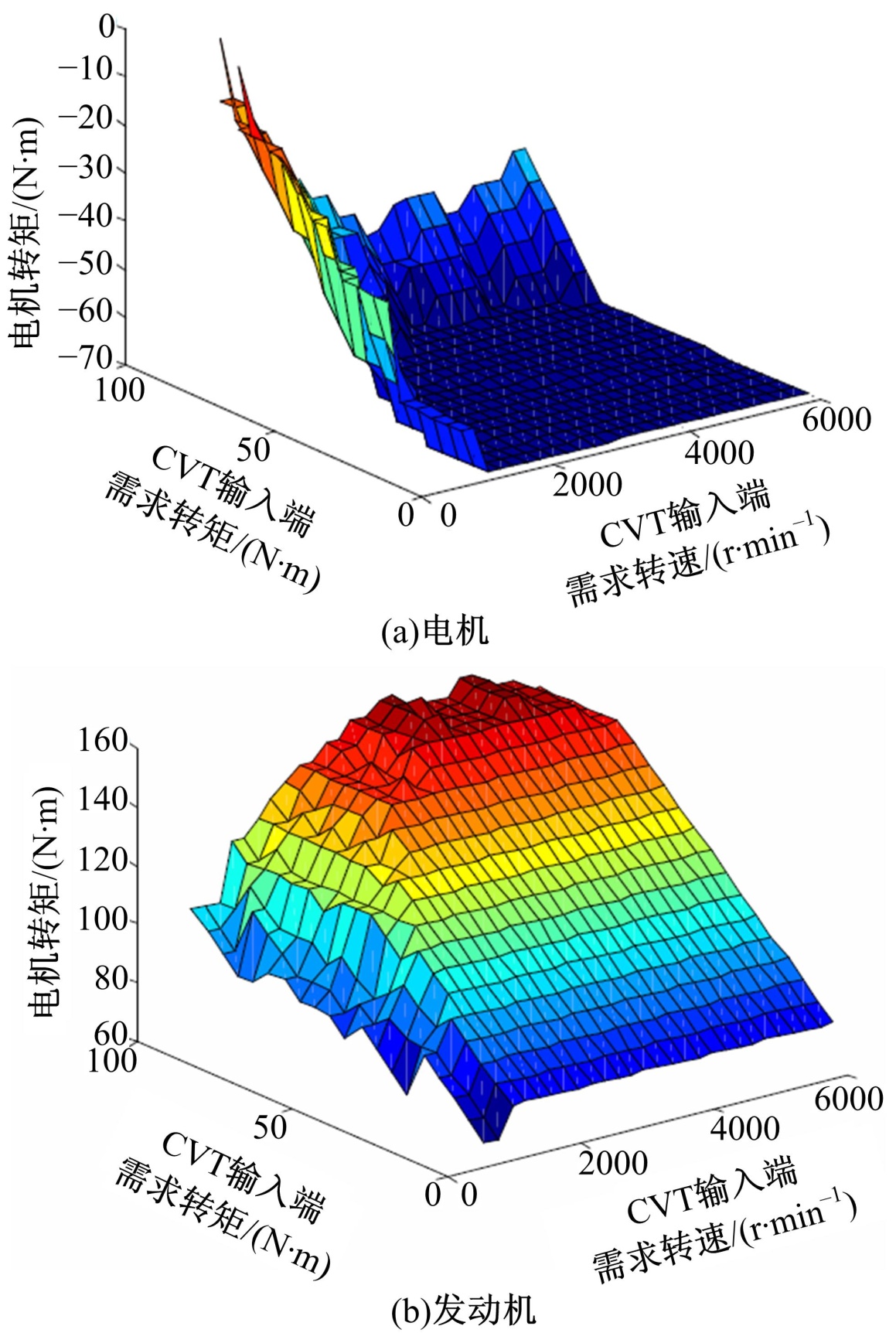 | 图6 电机和发动机转矩(行车充电)Fig.6 Motor and engine torque of charging mode |
利用Matlab/simulink仿真平台搭建整车模型, 在新欧洲驾驶循环(New european driving cycle, NEDC)工况下对基于驾驶意图的能量管理策略进行了仿真研究, 结果如图7和图8所示, 图7中, a、b、c、d、e、f、g、h为NEDC的工况块。
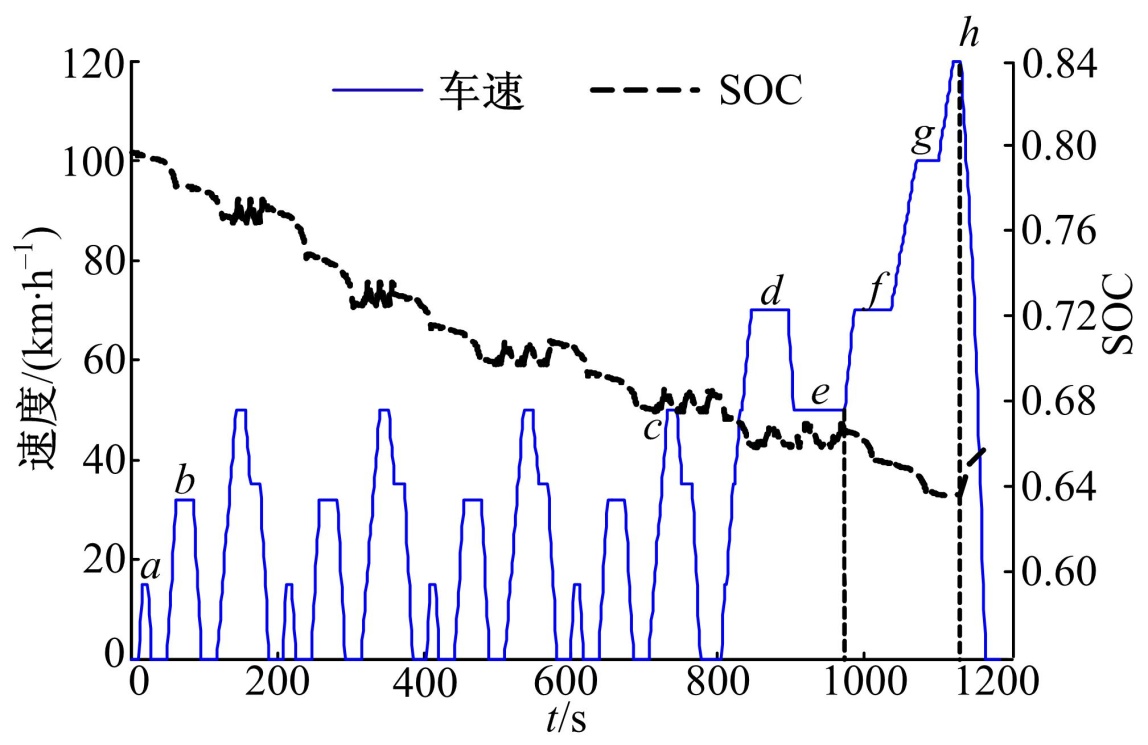 | 图7 电池SOC在NEDC工况下的变化曲线Fig.7 Changing curve of battery SOC in NEDC |
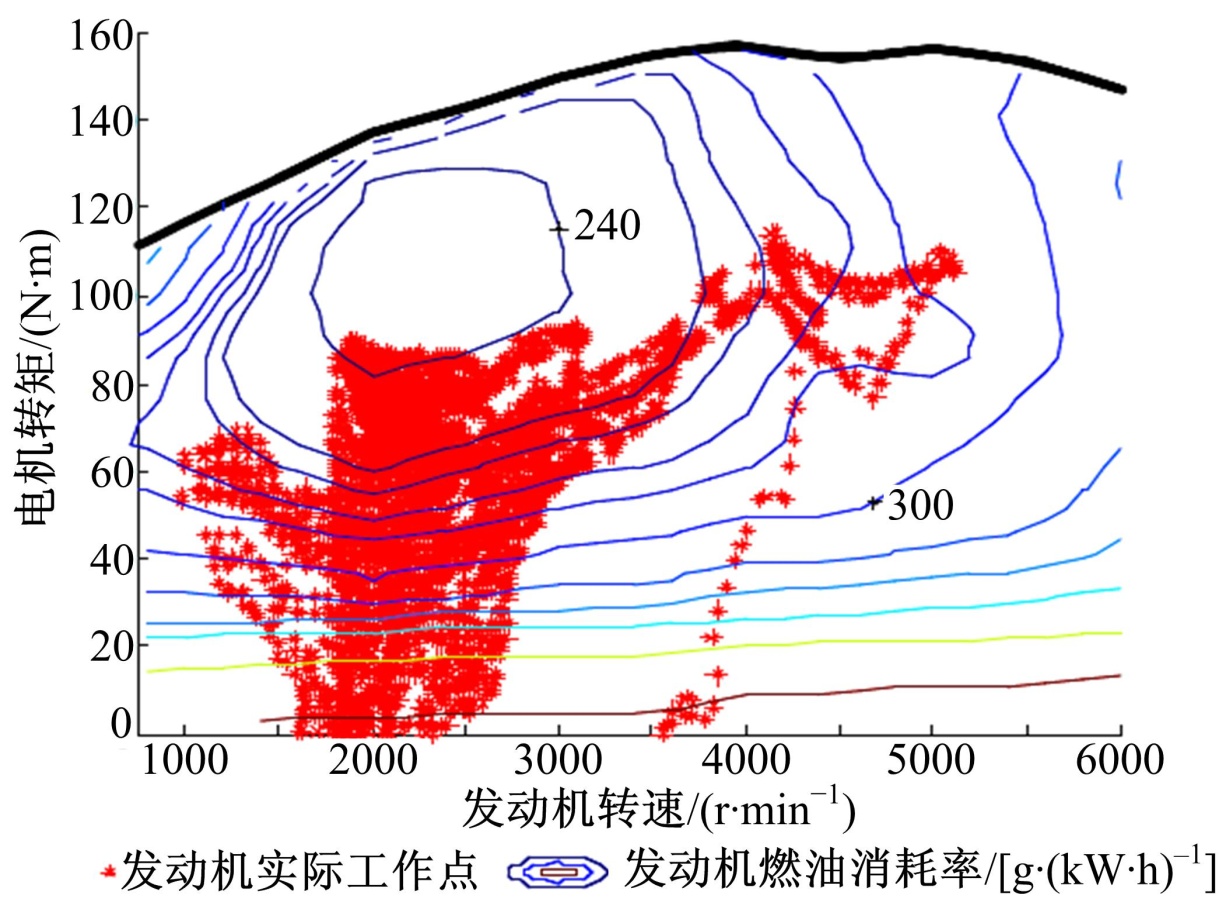
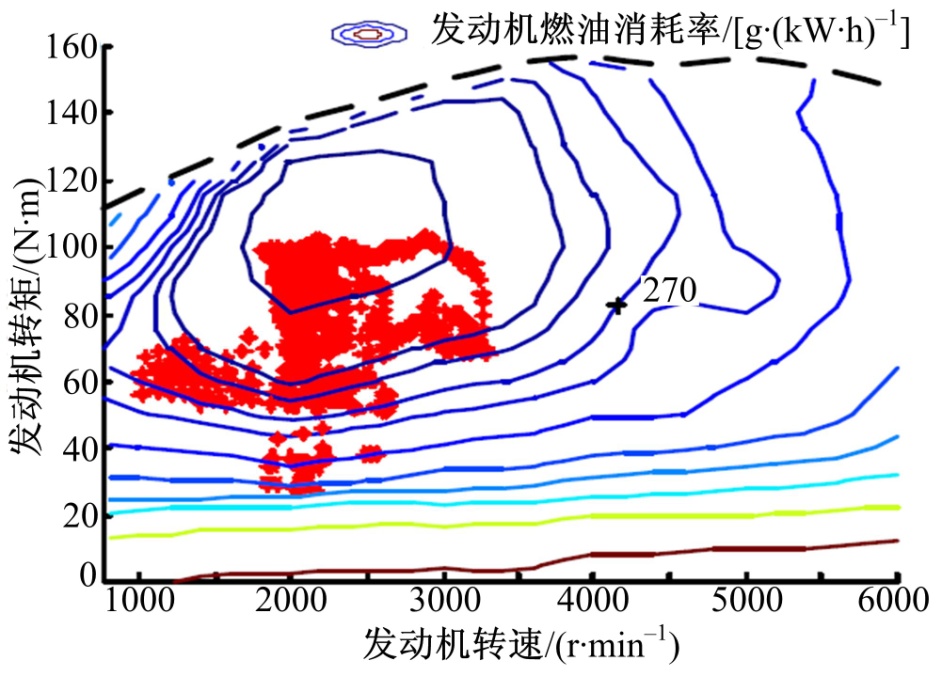 | 图8 发动机工作点Fig.8 Working points of engine |
图7给出了其中一个NEDC工况下电池SOC的变化曲线, 可以看出, 电池SOC总体处于下降趋势。在工况块a、b(车速较低)的加速段和巡航段时, 驾驶员需求转矩较小或者整车处于起步阶段, 整车运行在纯电动模式, 以ISG电机作为动力源, 此时电池SOC处于下降阶段; 在工况块c、d、e(车速中等)的加速段和巡航段, 驾驶员需求转矩中等, 整车运行在行车充电、混合驱动或发动机单独驱动模式, 以发动机作为主要动力源, 电池SOC上下波动, 总体处于电量维持模式; 在工况块f、g、h(车速较高)的加速段和巡航段, 驾驶员需求转矩较大, 整车运行在混合驱动模式或发动机单独驱动模式, 电池SOC处于下降阶段或维持阶段; 在每个工况块的减速段, 整车处于滑行再生制动或者再生制动模式, ISG电机处于发电模式, 进行能量回收, 电池SOC处于上升阶段。综上可以看出, 基于驾驶意图的能量管理策略可以满足驾驶员的操控意图。
图8给出了发动机的工作点, 可以看出, 发动机大部分工作点位于高效区, 说明基于驾驶意图的能量管理策略可以对发动机和ISG电机转矩进行合理的控制, 不仅能满足驾驶员的操作意图, 同时还可获得较好的能耗经济性。
为了体现基于驾驶意图的能量管理策略的优势, 本文同时对以CD-CS模式的能量管理策略[6, 7]进行了仿真计算, 得到两种控制策略的百公里油耗分别为4.45 L和4.85 L, 可以看出, 本文提出的能量管理策略与以CD-CS模式的能量管理策略相比, 百公里油耗降低了8.24%。
为了进一步验证本文基于驾驶意图的能量管理策略, 以D2P作为整车控制器, 对插电式混合动力汽车进行整车道路试验验证。由于PHEV对整车控制器实时性要求很强, 所以为加快控制器的运算速度, 将模糊控制器设计成模糊控制查询表, 采用查表方法得出驾驶员的操作意图。
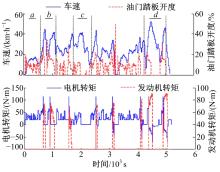
由于试验条件限制, 无法进行循环工况测试, 故选取一段随机路况进行测试, 结果如图9所示。
 | 图9 随机路况下的转矩分配Fig.9 Torque distribution of random road |
从图9可以看出, 当油门踏板开度较小、车速较低时(见图中的a部分), 整车处于起步阶段或平缓加速阶段, 需求扭矩较小, 由ISG电机单独驱动车辆运行, 能避免发动机经济性差的问题; 当油门踏板开度中等时(见图中的b部分), 整车处于一般加速阶段, 需求扭矩适中, 落入发动机经济性区域, 由发动机单独驱动车辆运行; 当油门踏板开度较小、车速较低时(见图中的c部分), 整车处于平缓加速或者低速巡航阶段, 整车运行在纯电动模式; 当油门踏板开度较大时(见图中的d部分), 整车处于一般加速阶段, 发动机参与工作, 为提高整车能耗经济性, 增加发动机负荷, 多余功率使ISG电机发电。综上可以看出, 整车控制较好地执行了基于驾驶意图的能量管理策略。
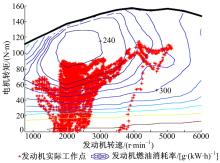
图10给出了驾驶员在上述同一路段下整车道路试验中发动机的实际工作点, 可以看出, 发动机大部分工况点处于燃油经济性较好的区域; 少部分工作点处于较差区域。这是因为发动机在起动和停机过程中转矩总体处于较低水平所致。
为了定量地评价本文提出的能量管理策略的有效性, 根据整车实验结果计算出百公里油耗为5.03 L, 相对于原汽油车百公里油耗的7.5 L, 能耗经济性提高了32.93%。
(1)针对插电式混合动力汽车的能量管理问题, 采用模糊推理控制器识别驾驶员意图, 根据发动机的特性曲线及电池SOC进行系统工作模式划分, 并应用瞬时优化方法进行发动机和电机的转矩分配, 在此基础上提出了插电式混合动力汽车基于驾驶意图的能量管理策略。
(2)在NEDC工况下采用基于驾驶意图的能量管理策略进行仿真研究。结果表明, 采用该能量管理策略可以实现插电式混合动力汽车燃油能量和电池能量的合理利用, 发动机的工作点基本运行在高效率区域。与CD-CS模式下的能量管理策略相比, 百公里油耗降低了8.24%。
(3)采用基于驾驶意图的能量管理策略进行整车道路试验, 结果表明, 该插电式混合动力汽车的百公里油耗相对于原汽油车降低了32.93%。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|