


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
月基二维转台轴承预紧力和系统刚度计算
[王智 ]
]
]
|
|


作者简介:王智(1978-),男,研究员,博士.研究方向:航天光学遥感器研制.E-mail:wz070611@126.com
为了研究在转台结构形式确定的情况下,轴承预紧力与系统刚度的关系,分析了轴承预紧力、轴承刚度和轴系刚度之间的关系,推导了轴承预紧力与轴系固有频率之间的计算公式,并通过有限元分析的方法获得了轴承预紧力与系统固有频率的关系曲线。通过对二维转台固有频率的测试,验证了该方法的正确性,同时为轴承最佳预紧力的确定提供了一个有效的方法。
The relationship between bearing preload and system stiffness was investigated under the condition that the structure turntable was fixed. The relationships among bearing preload, bearing stiffness and shafting stiffness were analyzed. The computation formula between bearing preload and shafting natural frequency was deduced. Using finite element analysis the relationship curve between bearing preload and system natural frequency was obtained. Natural frequency tests of a two-dimensional turntable verified the validity of the proposed method, and an effective method was provided to determine the optimum bearing preload.
嫦娥三号月球着陆器对极紫外相机的刚度提出了很高的要求, 同时为了避免与卫星及着陆器的基频耦合, 要求极紫外相机发射方向基频大于70 Hz, 垂直于发射方向基频大于28 Hz。极紫外相机的刚度主要由二维转台的刚度决定, 在相机主体以及二维转台结构形式确定的情况下, 系统刚度的高低就与轴系刚度的高低有直接的关系。月基二维转台主要由俯仰、方位轴系组成, 大量级的振动、冲击以及低速工作的模式, 要求所用轴承有较高的轴向、径向刚度; 同时, 转台的指向精度还要求轴承具有高的定位精度和低的摩擦力矩。为保证月基二维转台的精度和刚度, 在工程实施上, 轴系多采用配对、能预紧的角接触球轴承[1, 2]。
对配对使用的角接触球轴承施加合适的预紧力, 可以提高轴承刚度、轴系的旋转精度, 减小振动噪声, 消除轴向间隙。在安装轴承时, 如果实际预紧力大于最佳预紧力, 虽然可以获得较高的轴系刚度及抗卸载能力, 但却使轴承的摩擦力矩过大, 且容易出现“ 死点” , 导致温升加剧, 降低轴承寿命; 如果实际预紧力小于最佳预紧力, 虽然摩擦力矩小了, 但轴承刚度将不能满足系统刚度要求, 在较大的加速度作用下容易发生卸载, 出现间隙。因此施加预紧力的准确性对于轴承的性能以及系统的性能都有很大的影响。
为了保证极紫外相机二维转台的刚度、精度及可靠性要求, 本文在文献[3]工作的基础上对其轴承预紧力和系统刚度之间的关系进行分析, 推导出月基二维转台刚度与轴承预紧力之间关系的简化公式, 并通过有限元分析和试验验证了理论的正确性。
单个角接触球轴承只能承受一个方向的轴向载荷, 在承受径向载荷时, 会引起附加轴向力, 必须施加相应的反向载荷。因此角接触球轴承需成对使用, 且通过轴向定位预紧以提高其刚度。
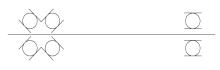
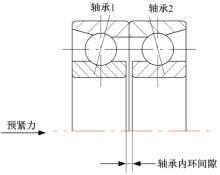
考虑嫦娥三号月球着陆器的力、热条件, 月基二维转台[4, 5](见图1)的俯仰、方位轴系轴承的配置均采用一端固定, 另一端游动的方式, 如图2所示。为了增加轴系的抗弯刚度, 月基二维转台俯仰、方位轴系固定端角接触球轴承均采用如图3所示的配对方式, 采用轴向定位预紧; 轴系的游动端采用深沟球轴承, 其内圈和轴之间可以滑动, 以消除温度变化引起的轴系变形。
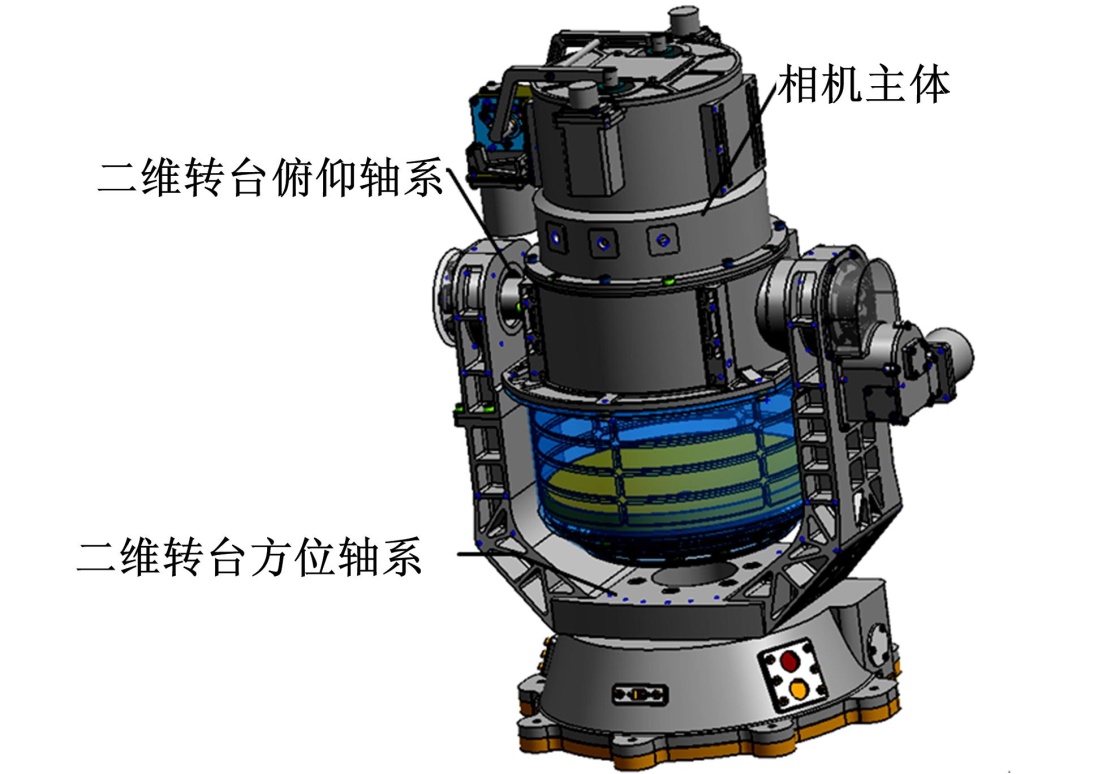 | 图1 月基极紫外相机结构模型Fig.1 Model of optical-mechanical structure design for EUV camera |
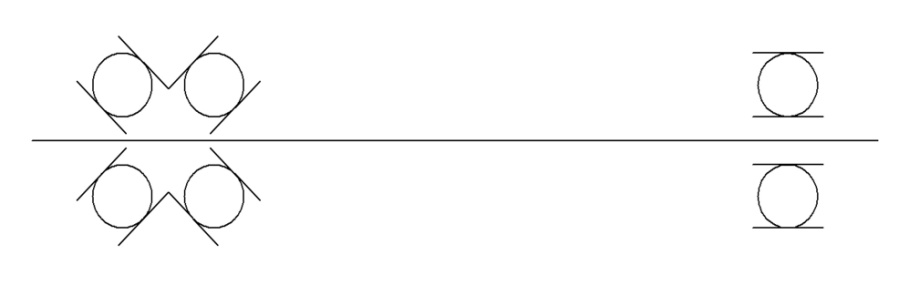 | 图2 轴系轴承配置方式Fig.2 Bearing configuration of shafting |
 | 图3 角接触轴承配置方式Fig.3 Partnership pattern of angle contact ball bearing |
轴承的预紧力影响着轴承的刚度, 轴承的刚度影响着轴系的刚度, 而轴系的刚度又影响着整个系统的固有频率。因此通过分析轴承预紧力与轴承刚度的关系、轴系刚度的关系, 建立轴承预紧力与系统固有频率的关系表达式, 确定轴承的最佳预紧力。
月基二维转台相机主体的质心设计在俯仰轴系的旋转轴上, 因此俯仰轴系受力简单, 静态情况下仅受径向负荷, 轴承径向刚度可以用简化计算公式[6, 7]获得:
式中:Dw为钢球直径; Z为单个轴承钢球数目; α 为接触角; Fa0为所施加的轴向预紧力。
方位轴系仅受轴向载荷, 轴承轴向刚度可以用简化计算公式获得:
月基二维转台在设计时, 需要考虑系统的力学环境适应性(正弦、随机), 要能承受卫星发射过程、地月变轨以及月表着陆过程的振动、冲击。因此动态情况下, 需要分析在径向、轴向联合负荷作用下轴承的刚度, 采用近似计算方法的轴承刚度计算式为:
由轴承动态刚度的近似计算公式可以看出, 联合负荷情况下轴承的径向刚度为纯径向负荷条件下径向刚度的2倍左右。原因是轴向负荷的施加使原本只在径向负荷下近一半钢球承载的情况变成了几乎所有钢球承载, 因此轴承径向刚度成倍提高, 所以轴向预紧力有利于提高轴承的径向刚度。
2.2.1 轴系固有频率计算
(1)俯仰轴系固有频率计算
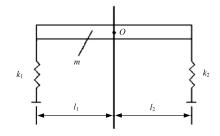
由前面的分析可以得知, 给配对使用的角接触球轴承施加合适的预紧力, 可以提高轴承的刚度, 进而提高轴系的刚度。而轴系的刚度可以由其固有频率来表征, 静态情况下俯仰轴系可以简化为如图4所示的弹簧质量系统, 该轴系的固有频率为[8]:
式中:Wn=2π f, f为轴系固有频率; m为轴系质量; K1、K2分别为柔性元件1、2的刚度; l1、l2分别为柔性元件1、2相对于振动体中心O的距离, l=l1+l2; I为振动体的转动惯量。
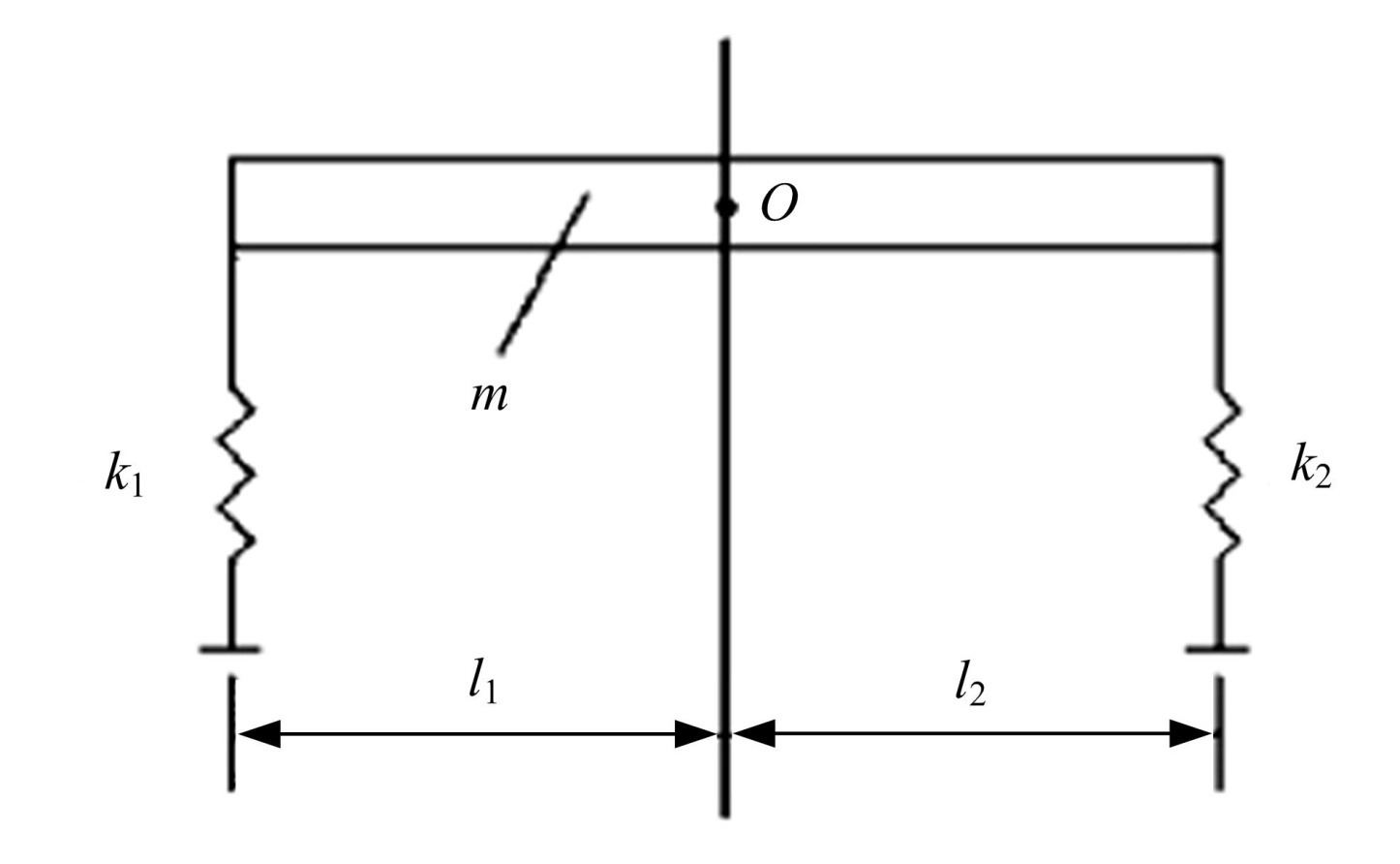 | 图4 弹簧质量系统Fig.4 System of spring-mass |
由式(5)可以看出, 俯仰轴系的固有频率取决于系统的质量、刚度及轴承的分布, 在图1所示的月基二维转台中, 轴系(含相机主体)的质量、转动惯量及轴承的分布都可以很容易计算。所以俯仰轴系的固有频率就取决于轴承的刚度, 即轴向定位预紧角接触球轴承的刚度。
(2)方位轴系固有频率计算
方位轴系仅受轴向载荷, 方位轴系的轴向振动模型如图5所示(图中C1、C2为阻尼), 可以得出方位轴系轴向刚度与固有频率的关系为[9]:
由式(6)可以看出, 方位轴系的固有频率取决于定位预紧角接触球轴承的刚度。
 | 图5 轴系轴向振动模型Fig.5 Axial dynamic model of a shafting |
2.2.2 轴承预紧力与轴系刚度的关系
(1)俯仰轴系
月基二维转台俯仰轴系所用角接触球轴承为71905AC, 由式(1)可知, 轴向定位预紧角接触球轴承的径向刚度与所施加的预紧力有关; 由式(5)可知, 轴系的刚度与相机主体的质量、角接触球轴承的刚度及分布有关。综合式(1)(5)可以得到轴承预紧力与轴系固有频率的关系为:
(2)方位轴系
月基二维转台的方位轴系所用角接触球轴承为71815C, 轴承预紧力与轴系固有频率的关系为:
由式(7)(8)可以看出, 在轴系结构已定的情况下, 轴承的预紧力与轴系的固有频率有关。
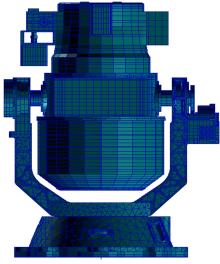
月基二维转台与相机主体的有限元模型如图6所示。
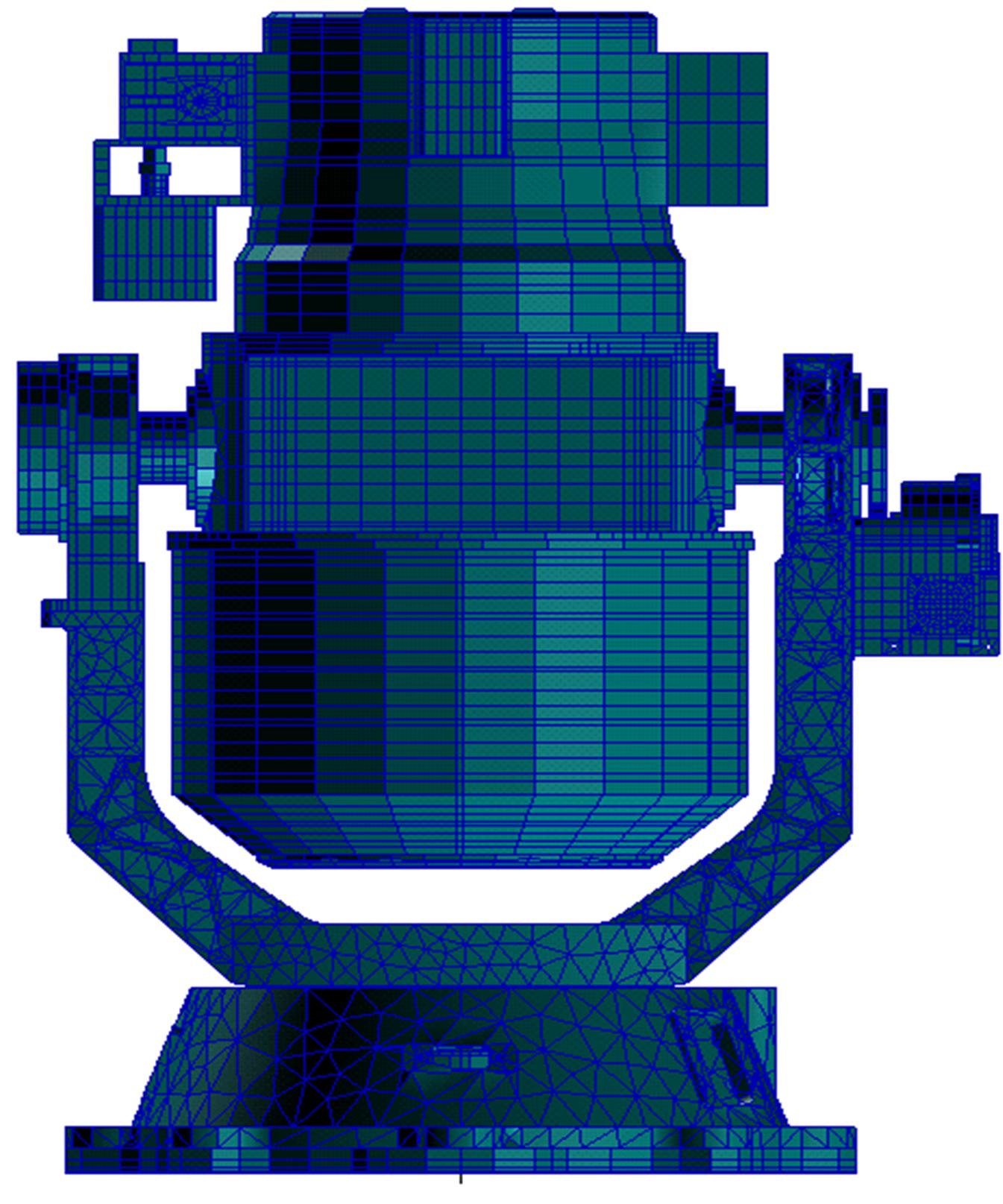 | 图6 系统有限元模型Fig.6 FEM of system |
在图6所示的整机有限元模型中, 对方位轴系角接触球轴承施加350 N预紧力, 对俯仰轴角接触球轴承施加不同预紧力。相机整机的一阶模态与俯仰轴系的角接触球轴承预紧力关系如表1所示。
| 表1 相机一阶模态与俯仰轴系轴承预紧力关系 Table 1 Relationship between preload of pitching bearing and first modal frequency of system |
从表1可以看出, 在方位轴系轴承预紧力不变的情况下, 相机整机频率随俯仰轴系轴承预紧力的增大而提高。
在图6所示的整机有限元模型中, 俯仰轴系轴承施加150 N预紧力, 对方位轴角接触球轴承施加不同预紧力。相机整机的一阶模态与方位轴系的角接触球轴承预紧力关系如表2所示。从表2可以得出, 在俯仰轴系轴承预紧力不变的情况下, 相机整机频率随方位轴系轴承预紧力的增大而提高。
| 表2 相机一阶模态与方位轴系轴承预紧力关系 Table 2 Relationship between preload of azimuth bearing and first modal frequency of system |
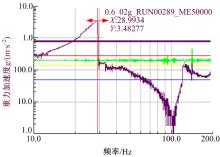
通过以上分析, 结合实际装配情况综合考虑整机模态分析时, 方位轴系预紧力施加350 N, 俯仰轴系预紧力施加120 N, 计算整机一阶模态为29.01 Hz。
整机的固有频率测试试验如图7所示, 相机通过专用工装固定在振动台上, 通过对系统进行0.2g扫频获得系统的基频。图7中相机的振动方向为与卫星发射方向垂直的方向, 且该方向系统的基频最低, 图8为该方向的基频曲线。
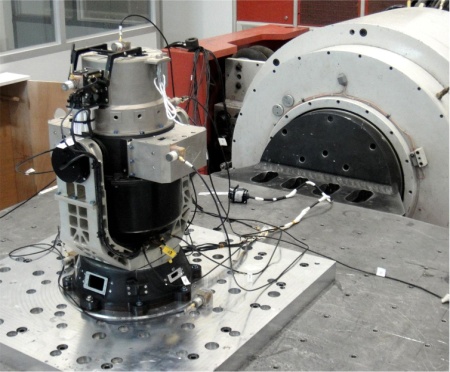 | 图7 系统固有频率测试Fig.7 Test for first modal frequency of system |
 | 图8 试验方向一阶频率曲线Fig.8 Test curve of first modal frequency |
为了满足嫦娥三号月球着陆器对月基二维转台提出的刚度要求, 在月基二维转台结构形式确定的情况下, 研究了提高系统刚度的措施。对配对使用的角接触球轴承施加合适的预紧力, 可以提高轴承的刚度, 进而提高支撑系统的刚度。基于该思路, 本文主要分析了轴承预紧力和轴承刚度、轴系刚度的关系, 推导出了轴承预紧力与轴系刚度的关系表达式, 并通过有限元分析的方法获得了轴承预紧力与整机固有频率的关系曲线。验证试验证明了理论的正确性, 并为确定轴承最佳预紧力提供了一个有效的方法。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|