考虑摩擦特性的机器人柔性关节鲁棒控制器设计
陈健, 葛连正, 李瑞峰
Design of robust controller for robot flexible joint with friction characteristic
CHEN Jian, GE Lian-zheng, LI Rui-feng
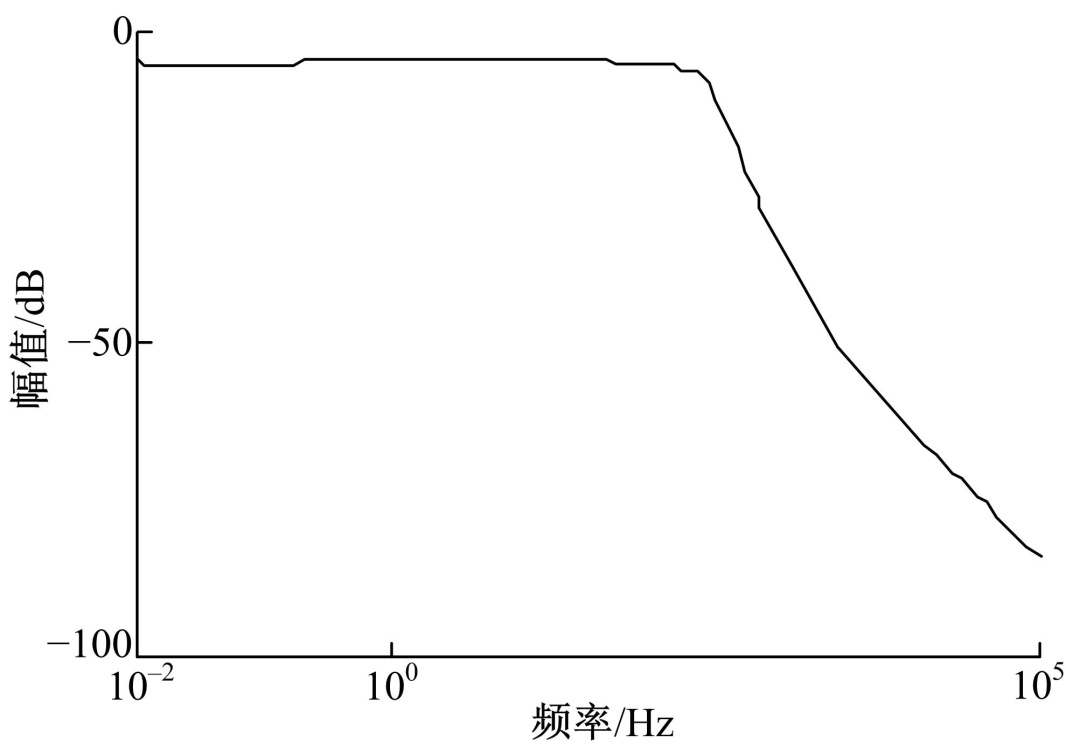
传递函数 M 的幅值